用于在能量递送期间自动夹持调节的系统和方法与流程
- 国知局
- 2024-08-30 14:36:45
本发明的方面涉及远程操作机器人系统中的末端执行器的控制,并且更具体地涉及用于末端执行器在能量递送期间夹持调节的系统和方法。
背景技术:
1、越来越多的设备被自主和半自主的电子设备取代。在当今的医院中尤其如此,在手术室、介入室、重症监护病房、急诊室等中发现了大量的自主和半自主电子设备。例如,传统的手动外科手术器械被计算机辅助医疗设备所取代。
2、使用计算机辅助医疗设备的微创外科手术技术通常试图执行外科手术程序和/或其他程序,同时使对健康组织的损害最小化。一些微创程序可以通过使用具有外科手术器械的计算机辅助医疗设备来远程地执行。通过使用许多计算机辅助医疗设备,外科医生和/或其他医务人员通常可以使用操作者控制台上的一个或多个控制件来操纵输入设备。当外科医生和/或其他医务人员在操作者控制台上操作各种控制件时,命令从操作者控制台传送到安装有一个或多个末端执行器和/或外科手术器械的患者侧设备。这样,外科医生和/或其他医务人员能够使用末端执行器和/或外科手术器械对患者执行一个或多个程序。根据所需程序和/或使用的外科手术器械,所需的程序可以在外科医生和/或医务人员使用远程操作的控制下和/或在半自主控制下部分地或全部地执行,其中外科手术器械可以基于外科医生和/或其他医务人员的一个或多个激活动作来执行一系列操作。
3、微创外科手术器械,无论是手动致动、远程操作致动和/或半自动致动,均可以用于各种操作和/或程序,并且可以具有各种配置。许多这样的器械包括安装在轴的远端处的末端执行器,该轴可以被安装到铰接臂的远端。在许多操作场景中,轴可以被配置成通过开口(例如,体壁切口、自然孔和/或类似物)插入(例如,以腹腔镜方式、以胸腔镜方式和/或类似方式插入)以到达远程外科手术部位。
4、不同设计和/或配置的末端执行器可以用于执行不同的任务、程序和功能,从而允许外科医生和/或其他医务人员执行各种外科手术程序。示例包括但不限于烧灼、消融、缝合、切割、吻合、融合、密封等和/或其组合。因此,末端执行器可以包括各种部件和/或部件的组合来执行这些外科手术程序。
5、与微创手术程序的目标一致,末端执行器的尺寸通常保持较小。保持末端执行器小尺寸的一种方法是通过使用外科手术器械的近端处的一个或多个输入装置来完成末端执行器的致动,其中近端通常位于患者的外部。各种传动部件(诸如齿轮、杠杆、滑轮、缆线、杆、皮带、条带和/或类似物)然后可以用于沿着外科手术器械的轴传输来自一个或多个输入装置的动作并致动末端执行器。在具有适当的外科手术器械的计算机辅助远程操作医疗设备的情况下,在器械的近端处的传动机构直接地或通过其它传动部件间接地与提供在患者侧设备或患者侧手推车的铰接臂上的一个或多个致动器相连接,该致动器诸如为各种马达、螺线管、伺服系统、主动致动器、液压系统、气动系统和/或类似物。(一个或多个)致动器接收响应于通过主控制器提供的用户命令而产生的控制信号,并且向器械提供涉及所述传动机构的近端处的力和/或扭矩的输入;各种传动元件最终传输力或扭矩以致动传动机构远端处的末端执行器。
6、末端执行器也可以被配置成将电能和/或热能传输到夹持材料,诸如患者的组织。例如在切割材料和/或准备用于切除的部分之前,传输的电能和/或热能可以用于烧灼、消融、融合、密封等和/或其组合。这种电能和/或热能的传输通常被小心地控制以实现期望的烧灼、消融、融合、密封和/或类似操作,而不会产生不期望的副作用。
7、随着计算机辅助手术系统(诸如直观外科手术公司(intuitive surgical)商售的da vinci外科手术系统)的出现,微创外科手术发生了革命性的变化。da vinci外科手术系统的一项创新是对末端执行器(诸如外科手术器械的末端执行器)以高准确度和高精度的控制,以执行期望任务。由于需要对末端执行器进行更精细和更准确的控制,对于控制系统来说,在不同的程序期间(诸如在烧灼、消融、融合、密封和/或类似程序期间)适当地致动末端执行器变得重要。
8、因此,具有能够适当地致动用于执行烧灼、消融、融合、密封和/或类似程序的末端执行器的控制系统是有利的。
技术实现思路
1、以下概述介绍本发明主题的某些方面,以提供基本的理解。本概述不是对本发明主题的广泛综述,也不旨在识别关键或重要元素或描绘本发明主题的范围。尽管本概述包含与本发明主题的各个方面和实施例相关的信息,其唯一目的是以一般形式呈现一些方面和实施例,作为下面更详细描述的序言。
2、根据一些实施例,一种系统包括器械,该器械包括具有第一夹具和第二夹具的末端执行器,第一夹具和第二夹具中的每一个均具有对应的电极。该系统进一步包括一个或多个控制单元,其被配置为致动末端执行器以夹持材料,确定致动的力或扭矩限制是否高于第一阈值,响应于确定力或扭矩限制高于第一阈值而减小力或扭矩限制,以及使用电极将电能或热能施加到材料上。
3、根据一些实施例,一种操纵材料的方法包括:致动器械的末端执行器的第一夹具和第二夹具中的一个或多个以夹持材料,通过一个或多个控制单元确定致动的力或扭矩限制是否高于第一阈值,响应于确定力或扭矩限制高于第一阈值而通过一个或多个控制单元减小力或扭矩限制,以及使用夹具上的电极将电能或热能施加到材料。
4、根据一些实施例,一种其上存储有多个机器可读指令的非暂时性计算机可读介质,当由与计算机辅助设备相关联的一个或多个处理器执行时,多个机器可读指令适于使一个或多个处理器执行一种方法。该方法包括致动器械的末端执行器的第一夹具和第二个夹具中的一个或多个来夹持材料,通过一个或多个控制单元来确定致动的力或扭矩限制是否高于第一阈值,响应于确定力或扭矩限制高于第一阈值而通过一个或多个控制单元减小力或扭矩限制,并使用夹具上的电极向材料施加电能或热能。
5、根据一些实施例,一种系统包括器械,器械包括具有第一夹具和第二夹具的末端执行器,该第一夹具和第二夹具的每一个均具有对应的电极。该系统进一步包括一个或多个控制单元,其被配置为在受到第一力或扭矩限制的第一模式下操作一个或多个夹具,在受到高于第一力或扭矩限制的第二力或扭矩限制的第二模式下操作一个或多个夹具,使用夹具夹持材料,并且响应于确定一个或多个夹具正在第二模式下操作,在使用电极将电能或热能施加到材料之前切换为在第一模式下操作一个或多个夹具。
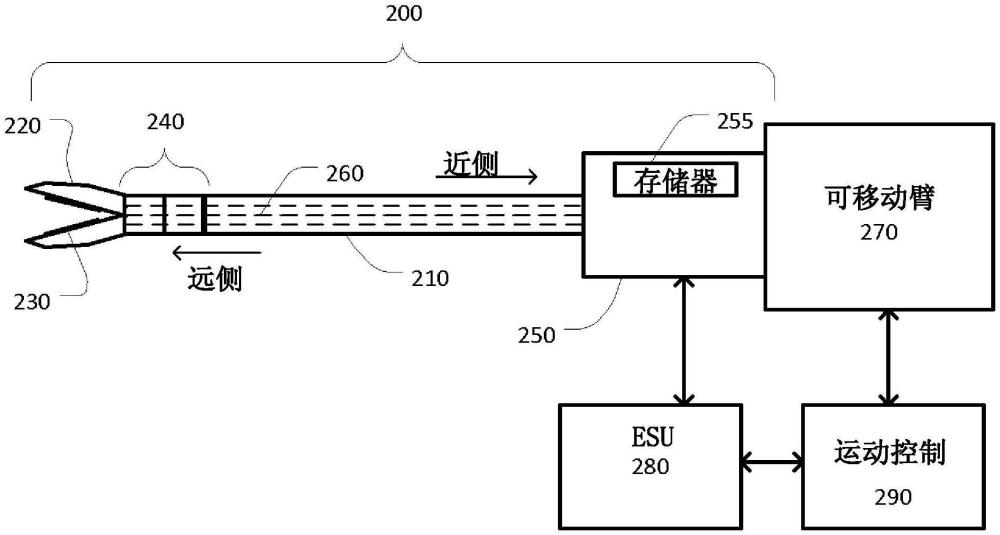
6、根据一些实施例,一种系统包括器械,器械包括具有第一夹具和第二夹具的末端执行器,该第一夹具和第二夹具中的每一个均具有对应的电极。该系统进一步包括电外科单元和运动控制单元,电外科单元被配置为监测和控制电极向由夹具夹持的材料施加能量,运动控制单元被配置为监测和控制夹具的致动。该运动控制单元被配置为:基于来自电外科单元的反馈来致动夹具中的一个或多个以夹持材料,确定致动的力或扭矩限制是否高于第一阈值,并且响应于确定力或扭矩限制高于第一阈值而减小力或扭矩限制。
技术特征:1.一种系统,其包括:
2.根据权利要求1所述的系统,其中所述第一阈值对应于将第一夹持模式的第一范围力或扭矩与第二夹持模式的第二范围力或扭矩的分开的力或扭矩。
3.根据权利要求1所述的系统,其中所述第一阈值被存储在所述器械的存储器中。
4.根据权利要求1所述的系统,其中所述第一阈值基于所述器械的类型、所述器械的型号、正在执行的程序、所述材料的类型或操作者的偏好中的一个或多个。
5.根据权利要求1所述的系统,其中所述力或扭矩限制随着时间减小。
6.根据权利要求1所述的系统,其中所述力或扭矩限制单调减小。
7.根据权利要求1所述的系统,其中所述材料是患者的组织。
8.根据权利要求1所述的系统,其中所述器械是容器密封器、电热密封设备或射频双极密封设备即rf双极密封设备。
9.根据权利要求1至8中任一项所述的系统,其中所述一个或多个控制单元进一步被配置为:
10.根据权利要求9所述的系统,其中所述停止条件是来自操作者的停止命令。
技术总结用于在能量递送期间夹持调节的系统和方法包种器械,该器械包括具有第一夹具和第二夹具的末端执行器。第一夹具和第二夹具中的每一个均具有对应的电极。该系统和方法进一步包括一个或多个控制单元,一个或多个控制单元被配置成致动末端执行器以夹持材料,确定致动的力或扭矩限制是否高于第一阈值,响应于确定力或扭矩限制高于第一阈值而减小力或扭矩限制,并且使用电极向材料施加电能或热能。在一些实施例中,一个或多个控制单元被进一步配置成在向材料施加电能或热能之后恢复力或扭矩限制。在一些实施例中,力或扭矩限制随时间而减小。技术研发人员:A·罗斯科夫斯基,G·F·布里森,C·R·杰尔比,J·汉姆菲尔,M·努斯鲍姆,H·S·拉提亚受保护的技术使用者:直观外科手术操作公司技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/283004.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
旋钮式拇指护具的制作方法
下一篇
返回列表