基于汽轮机发电组振动特征和SVDD的早期异常检测方法
- 国知局
- 2024-08-30 15:04:08
本发明属于汽轮机发电组异常检测,具体涉及一种基于汽轮机发电组振动特征和svdd的早期异常检测方法。
背景技术:
1、汽轮机发电组是电力行业、冶金工业、舰船动力装置中广泛使用的关键设备,随着我国经济发展,汽轮机发电组组面临着工业界安全高效高质量运行要求的压力。这要求发展相应的维护技术,在提高汽轮机发电组可靠性的同时降低费用。因此,针对汽轮机发电组运行过程中可能出现的各种故障,开展设备状态监测和故障预警工作,对保证汽轮机发电组的安全稳定运行具有重意义。
2、基于振动的故障预警是目前汽轮机发电组状态评价的最有效方法,实际应用中振动监测主要是幅值。然而在早期异常阶段,一些特殊情况下会掩盖振动现象。联合汽轮机发电组的关键振动特征如相位变化和轴心轨迹变化,可以及早发现故障并进行预警。
技术实现思路
1、本发明的目的是为了解决上述技术问题,提供一种能准确且及早发现故障的的基于振动特征和svdd的汽轮机发电组早期异常检测方法。
2、为实现上述目的,本发明提供基于汽轮机发电组振动特征和svdd的早期异常检测方法,包括如下步骤:
3、1)采集汽轮机发电组振动数据x(t)和y(t),同时获取汽轮机发电组采样时刻转子转速rotspeed、采样时刻的采样频率freq、采样的数据长度l、采样分频div及采样周期数cycle;
4、振动数据x(t)为x方向传感器测量的振动波形序列、振动数据y(t)为y方向传感器测量的振动波形序列,x方向传感器和y方向传感器布置在汽轮机发电组轴承处且相互垂直;
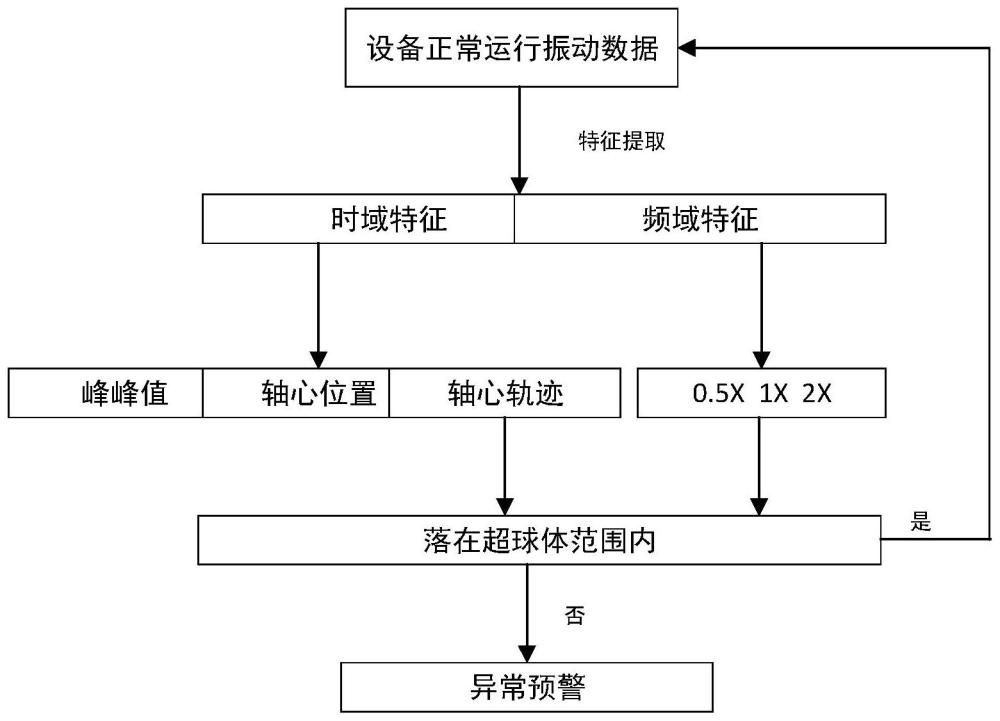
5、2)采集汽轮机发电组振动故障的时域特征和频域特征,时域特征包括峰峰值、轴心位置和轴心轨迹共三个特征;以1x表示与转动频率相等的频率,频域特征包括x方向的0.5x、1x、2x幅值相位和y方向的0.5x、1x、2x幅值相位共六个特征;
6、根据时域特征和频域特征对振动数据进行特征提取,并把提取到的特征记为特征向量,特征向量包括:
7、将x方向的平均峰峰值和y方向的平均峰峰值组合为1个2维向量作为峰峰值指标的特征向量;
8、将轴心轨迹的图像椭圆长短半轴比值和长轴角度θ组合为1个2维向量作为轴心轨迹的特征向量;
9、将轴心位置作为轴心位置的特征向量;
10、取x方向的0.5x、1x、2x幅值相位(a1,φ1)、(a2,φ2)、(a3,φ3)和y方向的0.5x、1x、2x幅值相位(a4,φ4)、(a5,φ5)、(a6,φ6)作为频域特征的六个特征向量;
11、3)通过svdd对步骤2)中所有特征向量的描述,确定汽轮机发电组正常运行时各特征向量的空间分布范围,当实时新采集振动数据的特征向量超出空间分布范围时,svdd模型将报出异常。
12、进一步地,所述步骤1)中,采样频率freq是汽轮机转子转速的2v倍,v为大于等于6的正整数;所述数据长度l为单次采样的振动数据序列长度,l=div×cycle=2n,n为大于等于9的正整数;采样分频div为单个旋转周期内采样点数,满足div=2v;采样周期数cycle为单次采样的2k个旋转周期,k为大于等于3的正整数。
13、进一步地,所述峰峰值特征向量的计算过程为:
14、峰峰值特征计算方法:
15、
16、其中,xmax是x方向振动数据序列的振动幅值的最大值,xmin是x方向振动数据序列的振动幅值的最小值;同理,ymax是y方向振动数据序列的振动幅值的最大值,ymin是y方向振动数据序列的振动幅值的最小值;xppv是x方向振动数据序列的峰峰值,yppv是y方向振动数据序列的峰峰值;
17、为了抑制偶然因素对信号峰峰值的干扰,将采集到的振动数据分成2s份子序列,s为大于等于2且小于2k-1的正整数,在每份子序列分别求的峰峰值,再进行平均,计算方法如下:
18、
19、其中,xppvw是第w份子序列的峰峰值,是上述2s份子序列的峰峰值的平均值。
20、进一步地,所述轴心轨迹特征向量的计算过程如下:
21、对x方向振动数据x(t)和y方向振动数据y(t)进行傅里叶变换,得到其频域复数序列fx和复数序列fy;
22、
23、
24、其中,ω代表频率,t代表振动信号中第t个数据,i为虚数单位,e-iωt为复变函数;
25、然后将频域复数序列中,对应到大于2x的频域分量的值置为0,得到新的复数序列fx′和复数序列fy′;
26、
27、
28、其中,fr为转子的转频,且fr=2π×rotspeed;
29、对fx′和fy′进行逆傅里叶变换,可得到滤波后的振动信号x′(t)和振动信号y′(t);
30、
31、
32、同理,ω代表频率,t代表振动信号中第t个数据,i为虚数单位,eiωt为复变函数;
33、将x′(t)和y′(t)进行关联即可得到提纯后的轴心轨迹;
34、为了消除转速变化的影响,进一步滑动平均各周期的轴心轨迹;每个周期同一相位上的轴心位置坐标与其相邻周期的坐标进行求平均值的操作,以使轴心轨迹的形状更为集中;
35、
36、其中,x″(2nm+c)代表x″(t)中第2nm+c个数据,同理,y″(2nm+c)代表y″(t)中第2nm+c个数据,x′(2nl+c)代表x′(t)中第2nl+c个数据,同理,y′(2nl+c)代表y″(t)中第2nl+c个数据,m代表采样周期数cycle中第m个周期,c代表单次采样中第c个数据,x″(t)、y″(t)为x′(t)、y′(t)滑动平均后的振动信号;
37、将不同运行工况下的轴心轨迹图像转化为统一形式的矩阵p,为此求振动信号的最大幅值vmax,其具体步骤如下:
38、vmax=max{max{|x″|},max{|y″|}}
39、将最大幅值vmax的1.2倍作为矩阵p对应的幅值范围,构造全为0的大小为r的轴心轨迹矩阵p,进一步划分矩阵每个元素对应的幅值范围:
40、
41、其中,vi、vj分别为矩阵p在(i,j)处,对应的水平和垂直方向的幅值范围;d为矩阵的幅值分辨率,u为轴心轨迹矩阵的大小;
42、在矩阵p中绘制轴心轨迹:
43、pi,j=pi,j+1 (xη∈vi,yη∈vj,η=1,2,…2n)
44、其中,pi,j为轴心轨迹矩阵p在(i,j)处的值,xη、yη为在vi、vj幅值范围内的振动信号x″(t)、振动信号y″(t)的第η个值;对于轴心轨迹中每个点,找到其在轴心轨迹矩阵中的对应位置,并将该位置的矩阵值增加1;
45、对轴心轨迹图像进行二值化处理,构造灰度图像c:
46、
47、其中,ci,j为灰度图像c在(i,j)处的灰度值;
48、对于灰度图像c,其(p,q)阶矩被称为原始矩,可以表示为mpq,定义如下:
49、
50、首先计算灰度图像c的灰度中心(c1,c2):
51、
52、
53、计算灰度图像c的中心矩:
54、
55、其中,upq是灰度图像c的(p,q)阶的中心矩;
56、计算和灰度图像c惯性等价的图像椭圆:
57、
58、对上述矩阵进行特征值分解,λ1和λ2是矩阵的特征值,从而计算图像椭圆长短轴:
59、
60、
61、其中,a是图像椭圆的长半轴,b是图像椭圆的短半轴,从而计算长短半轴比值
62、计算长轴与图像椭圆x轴的夹角θ为:
63、
64、进一步地,所述轴心位置的特征向量的具体过程如下:
65、
66、
67、其中,分别为x和y方向振动数据序列的平均值。
68、进一步地,所述频域特征向量计算过程如下:
69、
70、
71、其中,t为傅里叶变换的样本时间长度,η是从η0到t的数据;
72、采用傅里叶变换对振动数据进行处理,cxn代表对振动信号x″(t)进行傅里叶变换后的第n个倍频分量的复平面矢量,cyn代表对振动信号y″(t)进行傅里叶变换后的第n个倍频分量的复平面矢量,cxn和cyn用幅值a和相位φ在极坐标下用(a,φ)表示。
73、进一步地,所述步骤3)中采用svdd对上述特征向量进行描述具体如下:
74、每个特征向量使用1个svdd模型对该特征向量的分布范围进行描述共建立9个svdd模型;采集汽轮机发电组正常运行的振动数据,进行特征提取获得特征向量的样本集合,对于其中某一个特征向量,用{xh,h=1,2…n}来表示该类样本集;
75、假设样本集{xh,h=1,2…n}有h个样本点,假设这些样本点分布在一个球心为a0,半径为r的超球体中,则样本满足:
76、||xh-a0||2≤r2+ξh,ξ≥0
77、xh表示第h个样本,ξ是松弛变量,ξh表示第h个松弛变量;
78、对于某变量α和变量β,其高斯核函数计算方法如下:
79、
80、其中μ为高斯核函数的超参数;
81、位于超球体曲面上的样本作为支持向量xs,超球体的半径r可以由下式计算:
82、
83、xi和xj表示样本集的第i个样本和第j个样本,如果αi将看作样本xi的权重,表明所有样本的权重之和为1,而球心a0是所有样本的加权和;
84、对于一个新的样本点z,如果满球心距离l>r,则其处在超球体外,那么新的样本点z为异常点,则该样本到球心a0的距离l作为异常评价指标;
85、其中,样本点z到球心距离l的计算方法如下:
86、
87、进一步地,还包括设置报警策略进行实时预警,具体为:
88、对每个特征向量的状态定义标签,处在对应svdd描述的正常分布范围内的样本对应的正常状态标签为-1,处在正常分布范围外的样本为异常样本,对应标签为1;若采用半数预警模式时,当超过一半的特征向量状态标签为-1异常状态,则总状态加和将为异常状态,此时将进行异常预警;若采用全局预警模式时,所有的状态标签都为-1,即所有的特征向量都是异常状态时,再进行异常预警;
89、
90、与现有技术相比,本发明的有益效果为:本发明综合分析汽轮机发电组的关键振动特征如峰峰值、轴心轨迹、相位变化,可以及早发现故障并进行预警,能够实现异常监测,并输出异常指标,对设备劣化进行定量评价。
本文地址:https://www.jishuxx.com/zhuanli/20240830/285357.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
变电站验电平台的制作方法
下一篇
返回列表