一种PTZ相机与雷达协同的目标定位追踪方法及系统与流程
- 国知局
- 2024-08-30 15:01:48
本发明属于目标追踪领域,公开了一种ptz相机与雷达协同的目标定位追踪方法及系统。
背景技术:
1、ptz(pan-tilt-zoom)相机因其具有全方位的移动能力、镜头控制功能和宽泛的应用场景的特点,成为安防监控系统的重要设备。ptz相机通过控制摄像头的云台、倾斜和变焦功能,实现对目标的跟踪和定位。目前ptz相机的定位与跟踪技术已广泛引用于安防监控、智能交通和体育赛事等领域。然而,由于距离过长、目标被遮挡、光照环境变化频繁等因素,导致仅依靠ptz相机完成目标定位和追踪功能的稳定性和准确性收到影响。
2、因此需要进一步的研究和创新,以解决现有技术存在的上述问题。
技术实现思路
1、发明目的,提供一种ptz相机与雷达协同的目标定位追踪方法及系统,以解决现有技术存在的上述问题。
2、技术方案,一种ptz相机与雷达协同的目标定位追踪方法,包括如下步骤:
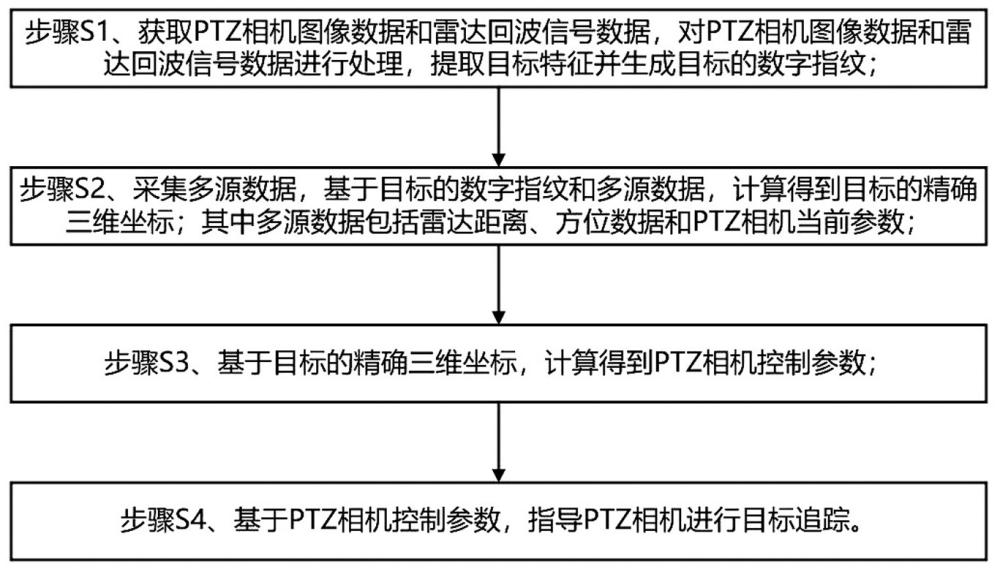
3、s1、获取ptz相机图像数据和雷达回波信号数据,对ptz相机图像数据和雷达回波信号数据进行处理,提取目标特征并生成目标的数字指纹;
4、s2、采集多源数据,基于目标的数字指纹和多源数据,计算得到目标的精确三维坐标;其中多源数据包括雷达距离、方位数据和ptz相机当前参数;
5、s3、基于目标的精确三维坐标,计算得到ptz相机控制参数;
6、s4、基于ptz相机控制参数,指导ptz相机进行目标追踪。
7、根据本申请的一个方面,步骤s1进一步为:
8、s11、获取ptz相机图像数据和雷达回波信号数据;
9、s12、对ptz相机图像数据采用多尺度自适应区域增长算法,生成视觉特征向量;
10、s13、对雷达回波信号数据采用自适应分段非线性傅里叶变换算法,生成雷达特征向量;
11、s14、采用动态加权张量分解算法,融合视觉特征向量和雷达特征向量,生成综合特征向量;
12、s15、基于综合特征向量,采用自适应局部敏感哈希算法,构建目标的数字指纹。
13、根据本申请的一个方面,步骤s2进一步为:
14、s21、采集多源数据,包括雷达距离、方位数据和ptz相机当前参数;
15、s22、基于目标的数字指纹和ptz相机当前参数,采用自适应模糊逻辑推理算法,计算目标在相机坐标系中的初始位置;
16、s23、基于初始位置、雷达距离和方位数据,采用多层级粒子群优化卡尔曼滤波算法,估算目标的精确三维坐标;
17、s24、采用动态四元数插值算法,将目标的精确三维坐标从全局坐标系转换到ptz相机的局部坐标系,得到局部坐标;
18、s25、基于局部坐标,通过自适应透视n维投影模型,计算目标在图像平面上的理论位置。
19、根据本申请的一个方面,步骤s3进一步为:
20、s31、基于目标的精确三维坐标和目标在图像平面上的理论位置,采用混合人工势场-神经动力学算法,计算得到初始ptz相机控制参数;
21、s32、基于目标的精确三维坐标和目标在图像平面上的理论位置,使用分形时间序列预测模型,预测目标的短期未来位置;
22、s33、基于预测的短期未来位置,计算得到预测的最优ptz相机控制参数;
23、s34、基于初始ptz相机控制参数和最优ptz相机控制参数,采用模糊认知图-强化学习混合控制器,生成平滑的ptz控制指令序列。
24、根据本申请的一个方面,步骤s4还包括指导预定个ptz相机进行自适应多目标追踪,具体为:
25、s41、获取预定个目标的数字指纹和精确三维坐标,采用动态图匹配-谱聚类算法,构建多目标跟踪队列;
26、s42、基于多目标跟踪队列,使用自适应多目标差分进化算法,为预定个ptz相机分配追踪任务,得到相机任务分配方案;
27、s43、基于相机任务分配方案中的每个目标的ptz相机控制参数,生成综合控制指令集;
28、s44、基于综合控制指令集,指导预定个ptz相机进行自适应多目标追踪。
29、根据本申请的一个方面,步骤s34进一步为:
30、s341、基于初始ptz相机控制参数和最优ptz相机控制参数,构建模糊认知图;
31、s342、构建基于模糊认知图的q学习模型,q学习模型的状态空间包含初始ptz相机控制参数和最优ptz相机控制参数;
32、s343、通过蒙特卡洛树搜索优化q学习模型的动作选择策略,得到初步控制序列;
33、s344、采用样条平滑算法对初步控制序列进行调整,生成最终的ptz控制指令序列。
34、根据本申请的一个方面,还包括对步骤s2的目标的精确三维坐标进行实时监控,当检测到目标遮挡或丢失时,采用自适应注意力机制-孪生网络算法,恢复对目标的跟踪。
35、根据本申请的一个方面,步骤s13进一步为:
36、s131、对雷达回波信号数据进行预处理,去除背景噪声和固定杂波,得到清洁信号;
37、s132、将清洁信号分段,得到自适应长度的信号段集;
38、s133、基于信号段集,采用非线性相位函数和改进的快速傅里叶变换,得到时频表示;
39、s134、基于时频表示,采用峰值聚类-跟踪算法,计算得到频谱峰值跟踪结果;
40、s135、基于频谱峰值跟踪结果,估算目标的距离、速度和方位信息,生成雷达特征向量。
41、根据本申请的一个方面,步骤s31进一步为:
42、s311、基于目标的精确三维坐标,构建以目标在图像平面上的理论位置为中心的人工势场,定义中心为全局最小点;
43、s312、构建神经动力学模型,将人工势场映射到神经动力学模型的能量函数中,形成混合优化模型;
44、s313、使用改进的hopfield网络对混合优化模型进行求解,得到初始ptz相机控制参数估计值;
45、s314、采用动态退火策略对初始ptz相机控制参数估计值进行微调,得到优化后的初始ptz相机控制参数。
46、一种ptz相机与雷达协同的目标定位追踪系统,包括:
47、至少一个处理器;以及,
48、与至少一个所述处理器通信连接的存储器;其中,
49、所述存储器存储有可被所述处理器执行的指令,所述指令用于被所述处理器执行以实现上述任一项技术方案所述的ptz相机与雷达协同的目标定位追踪方法。
50、有益效果,本发明通过多模态特征的提取和融合,全面、准确地捕捉目标特征,从而获得准确的ptz相机控制参数值,提高了ptz相机对于目标的定位与追踪的稳定性和准确性。
技术特征:1.一种ptz相机与雷达协同的目标定位追踪方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s1进一步为:
3.根据权利要求2所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s2进一步为:
4.根据权利要求3所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s3进一步为:
5.根据权利要求4所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s4还包括指导预定个ptz相机进行自适应多目标追踪,具体为:
6.根据权利要求5所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s34进一步为:
7.根据权利要求5所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,还包括对步骤s2的目标的精确三维坐标进行实时监控,当检测到目标遮挡或丢失时,采用自适应注意力机制-孪生网络算法,恢复对目标的跟踪。
8.根据权利要求5所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s13进一步为:
9.根据权利要求5所述的ptz相机与雷达协同的目标定位追踪方法,其特征在于,步骤s31进一步为:
10.一种ptz相机与雷达协同的目标定位追踪系统,其特征在于,包括:
技术总结本发明公开了一种PTZ相机与雷达协同的目标定位追踪方法及系统,该方法包括获取PTZ相机图像数据和雷达回波信号数据,对PTZ相机图像数据和雷达回波信号数据进行处理,提取目标特征并生成目标的数字指纹;采集多源数据,基于目标的数字指纹和多源数据,计算得到目标的精确三维坐标;其中多源数据包括雷达距离、方位数据和PTZ相机当前参数;基于目标的精确三维坐标,计算得到PTZ相机控制参数;基于PTZ相机控制参数,指导PTZ相机进行目标追踪。本发明通过多模态特征的提取和融合,全面、准确地捕捉目标特征,从而获得准确的PTZ相机控制参数值,提高了PTZ相机对于目标的定位与追踪的稳定性和准确性。技术研发人员:杨好天,孙立国受保护的技术使用者:中科南京人工智能创新研究院技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/285181.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。