一种无人驾驶滚装跨运母子车的制作方法
- 国知局
- 2024-09-05 14:52:50
本发明属于物流运输装备,具体地说,是涉及一种用于商品汽车滚装码头的无人驾驶滚装跨运母子车。
背景技术:
1、自从1958年美国建造第一艘滚装船以来,滚装码头商品汽车的装卸船均是由人工驾驶商品汽车一辆一辆开上船装船,又一辆一辆开下船卸船,一直延续到今天。滚装船装载能力从最早的几百辆到现在的近万辆,滚装码头装卸船频次从每月一班到今天每天几班,商品汽车装卸船的数量已经不能同日而语了,然而今天滚装码头的装卸船作业方法依旧,耗费大量人工,低效率装卸船,低质量装卸船。各个滚装码头都设置商品汽车维修部门,主要是装卸船时,由于劳动强度大,驾驶员疲劳导致车辆磕碰划伤。
2、集装箱运输是国际贸易中的最大形式,许多港口使用集装箱卡车、集装箱agv和集装箱跨运车等运输形式在码头前沿进行平面运输任务,集装箱跨运车就是岸桥将集装箱从船上卸下放置在码头陆面上,一台大型的门字形运输车跨过集装箱并吊起集装箱将其运送到集装箱堆场,这就是集装箱跨运车。
3、随着商品汽车进出口数量增加,烟台港滚装码头使用了商品汽车agv搬运车,进行堆场与立体库之间的平面搬运作业,这也是商品汽车跨运车,但是agv跨运车不能爬坡不能上船作业,不能直接参与滚装船的装卸船作业。
4、现在所有滚装码头装卸船作业均是由滚装驾驶员和定位驾驶员来协作完成,滚装驾驶员负责将商品汽车由堆场开上滚装船,定位驾驶员负责将商品汽车在船舱精准定位。每一个岗位驾驶员劳动强度都很大很辛苦,伴随来的均有一个装卸船商品汽车车损率指标要求,对各个环节的驾驶员的要求就十分高。
技术实现思路
1、本发明的目的在于一种用于商品汽车滚装码头的无人驾驶滚装跨运母子车,母车是替代滚装驾驶员将码头堆场商品汽车搬运上船或将滚装船上的商品汽车搬运下船的无人驾驶滚装跨运车,子车是在船舱将母车搬运上船的商品汽车搬运到目标停车位置定位或将要卸船的商品汽车搬运入母车内的定位搬运小车;在滚装船靠泊后,无人驾驶滚装跨运车(母车)夹抱定位搬运小车(子车)上船,并将定位搬运小车布放在滚装船卸船船舱和装船船舱,定位搬运小车则替代定位驾驶员在滚装船上实施作业,在提高装卸船质量的同时节省了人力投入。
2、本发明采用以下技术方案予以实现:
3、提出一种无人驾驶滚装跨运母子车,由作为母车的无人驾驶滚装跨运车和作为子车的定位搬运小车组成;其中,
4、无人驾驶滚装跨运车由左侧框架、顶部框架和右侧框架组成门字形车体结构,车体下空间可以纵向跨过一辆常规商品汽车;在左侧框架底部和右侧框架的底部安装左前、左后、右前和右后四部轮毂电机车轮;在两侧框架底部前后车轮之间布设用于夹抱商品汽车四个轮胎的四个第一夹抱装置,每个第一夹抱装置固定在一个第一刚性基座上;每个第一夹抱装置由第一推杆、第一左齿轮组、第一左夹持臂、第一右齿轮组和第一右夹持臂组成,其中,第一左夹持臂固定在第一左齿轮组最外侧齿轮的轮轴上,第一右夹持臂固定在第一右齿轮组最外侧齿轮的轮轴上,第一推杆两侧开设齿条并布设在第一左齿轮组和第一右齿轮组中间与二者同时啮合;第一推杆推或拉时,基于啮合关系而带动第一左齿轮组和第一右齿轮组转动,让第一左夹持臂和第一右夹持臂以90度角度展开呈直线状或靠拢呈平行状;在第一左夹持臂和/或第一右夹持臂的末端安装有第一锁舌;
5、定位搬运小车由站立式车头和低底盘组成l型结构,在低底盘上布设用于夹抱商品汽车四个轮胎的四个第二夹抱装置,每个第二夹抱装置固定在一个第二刚性基座上;第二夹抱装置由第二推杆、第二左齿轮组、第二左夹持臂、第二右齿轮组和第二右夹持臂组成,其中,第二左夹持臂固定在第二左齿轮组最外侧齿轮的轮轴上,第二右夹持臂固定在第二右齿轮组最外侧齿轮的轮轴上,第二推杆两侧开设齿条并布设在第二左齿轮组和第二右齿轮组中间与二者同时啮合;第二推杆推或拉时,基于啮合关系而带动第二左齿轮组和第二右齿轮组转动,让第二左夹持臂和第二右夹持臂以90度角度展开呈直线状或靠拢呈平行状;在低底盘的两侧开设有可供第一锁舌伸入的第一锁眼;
6、当定位搬运小车纵向驶入无人驾驶滚装跨运车的门字形车体内后,第一夹抱装置的第一推杆拉动,基于啮合关系带动第一左齿轮组和第一右齿轮组转动,使第一左夹持臂和第一右夹持臂相互靠拢呈平行状,然后第一左夹持臂和/或第一右夹持臂末端的第一锁舌伸出并伸入低底盘两侧的第一锁眼中,实现将定位搬运小车以子车锁定在作为母车的无人驾驶滚装跨运车上。
7、上述母子车布设在码头无人驾驶滚装跨运车带有充电功能的停车位上,当滚装船靠泊后,根据滚装船装卸船作业需求,先由无人驾驶滚装跨运车夹抱定位搬运小车上船,将定位搬运小车布设在装船船舱和卸船船舱;在装船船舱,当无人驾驶滚装跨运车(以下简称母车)由码头商品汽车堆场夹抱一辆商品汽车行驶到装船船舱车辆交换区时,在交换区的定位搬运小车(以下简称子车)接收到母车信号后,钻入母车内,基于第二夹抱装置夹持臂伸展与顶升和第一夹抱装置夹持臂收缩与落下完成商品汽车在母子车之间的交换,之后子车搬运商品汽车与母车分离,并将商品汽车搬运至目标停车位定位停放,母车又驶入卸船船舱搬运到港商品汽车;在卸船船舱,当子车钻入船舱商品汽车停车区的到港车辆底部将一辆商品汽车搬运到交换区时,子车向在交换区的母车发出信号,子车搬运商品汽车一起驶入母车内部,基于第一夹抱装置夹持臂伸展与顶升和第二夹抱装置夹持臂收缩与落下完成商品汽车在母子车之间的交换,之后母车夹抱商品汽车与子车分离,母车将商品汽车运送到码头堆场,子车继续作业。
8、与现有技术相比,本发明的优点和积极效果是:本发明提出的无人驾驶滚装跨运母子车具有以下技术效果:
9、(1)无人跨运滚装跨运车作为母车替代滚装驾驶员在码头堆场和滚装船之间运输装卸商品汽车,定位搬运小车则作为子车替代定位驾驶员在滚装船上腾挪定位商品汽车,由于采用无人化作业模式,避免了人工模式由于疲劳造成的商品汽车擦碰事故发生,大大提高装卸船效率。
10、(2)母子车一体化设计,特别是母车采用了最先进的轮毂电机车轮设计和车体升降设计,彻底改变了agv商品汽车跨运车不能爬坡上滚装船的难题。
11、(3)无人驾驶滚装跨运车的出现,不仅彻底改变了传统的商品汽车滚装码头依靠人工装卸船作业模式,而且对包括商品汽车堆场管理的数智化立体化管理起到了积极促进作用。
12、(4)一方面减少了商品汽车行驶里程,给客户有一个新车感受,另一方面减少了二氧化碳排放。
13、在本发明一些实施例中,所述左侧/右侧框架底部均开设有第一滑道,前后两个第一夹抱装置的第一刚性基座均通过滑块滑动安装于所述第一滑道中;由第一驱动机构驱动前后两个第一夹抱装置在所述第一滑道内运行,用以改变夹抱间距以适配不同轴距的车型;所述低底盘纵向上开设有第二滑道,四个第二夹抱装置的第二刚性基座均通过滑块滑动安装于所述第二滑动中;由第二驱动机构驱动四个第二刚性基座在所述第二滑道内运行,用以改变夹抱间距以适配不同轴距的车型。
14、第一驱动机构和第二驱动机构例如:一部电机输出轴齿轮啮合同轴线上的一左一右齿轮,一左一右齿轮分别啮合前轮夹抱装置滑块和后轮夹抱装置滑块上的齿条,通过电机驱动实现前后轮夹抱装置之间的距离调整。
15、左侧/右侧框架底部开设的第一滑道结构,使得左/右前轮和左/右后轮能够适配不同类型汽车的轴距而改变夹抱间距,提高了无人驾驶滚装跨运车的应用范围和适配性。同理的,定位搬运小车的低底盘上开设的第二滑道结构,使得前轮的两个第二刚性基座与后轮的两个第二刚性基座之间能够适配不同类型汽车的轴距而改变夹抱间距,提高了定位搬运小车的应用范围和适配性。
16、在本发明一些实施例中,所述无人驾驶滚装跨运车的左侧框架内侧和右侧框架内侧,与所述定位搬运小车的站立式车头对应的位置设置有第二锁舌;在所述定位搬运小车的站立式车头的两侧开设有第二锁眼;当定位搬运小车纵向驶入无人驾驶滚装跨运车的门字形车体内后,所述第二锁舌伸入所述第二锁眼中。
17、除了上述第一锁舌与第一锁眼的固定结构,在定位搬运小车的站立式车头部分通过第二锁舌和第二锁眼的结构进一步加强定位搬运小车与无人驾驶滚装跨运车的锁定强度。
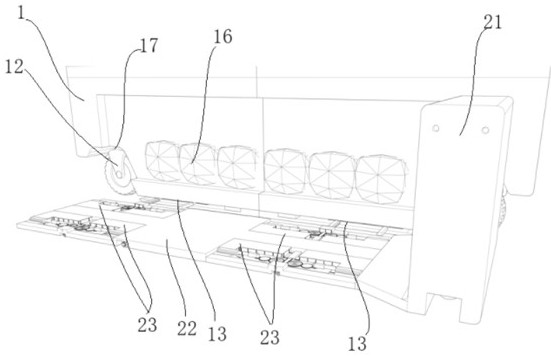
18、在本发明一些实施例中,在所述无人驾驶滚装跨运车的左侧框架内侧和右侧框架内侧安装有气囊;在夹抱商品汽车前,所述气囊被抽真空,当夹抱商品汽车后,所述气囊被充满气体。
19、当夹抱商品汽车后,气囊被充满气体,从而填充商品汽车与侧面框架之间的空间,对商品汽车起到保护作用,且气囊外表层采用友好型材料不会损伤车体漆面。
20、在本发明一些实施例中,所述无人驾驶滚装跨运车在每个轮毂电机车轮悬架系统上端安装液压顶升机构,当商品汽车或定位搬运小车被夹抱后,驱动所述液压顶升机构将门字形车体顶起,使得被夹抱的车辆轮胎离开地面有足够距离。
21、每个轮毂电机车轮单独驱动,在每个轮毂电机车轮悬架系统上端安装液压顶升机构,该液压顶升机构用于相对轮毂电机车轮对门字形车体实施升降,当无人驾驶滚装跨运车夹抱商品汽车或定位搬运小车后,液压顶升机构将门字形车体顶升,从而将商品汽车或定位搬运小车抬升一定高度,保障无人驾驶滚装跨运车能够夹抱车辆顺利爬升上滚装船的斜坡路段。
22、可以在第一夹抱装置的第一滑道底板增加一个升降机构,使得无人驾驶滚装跨运车具有两级升降功能,可以减少轮毂电机车轮悬挂系统上的液压顶升机构的行程。
23、在本发明一些实施例中,所述定位搬运小车的低底盘的每个第二夹抱装置的第二刚性基座底部安装有升降平台(如剪刀式液压升降平台),用于在第二夹抱装置夹抱商品汽车轮胎后将车辆顶升;升降平台下布设从动轮。
24、定位搬运小车在夹抱商品汽车后,第二夹抱装置的刚性基座底部的升降平台起升,将商品汽车抬高一定高度,保障定位搬运小车夹抱商品汽车顺利运行。
25、在本发明一些实施例中,所述无人驾驶滚装跨运车的门字形车体框架内安装有动力电池、各类传感器、电动和/或液压系统、电动充气抽空系统、通讯系统、无人驾驶控制系统等控制系统;所述定位搬运小车的站立式车头内安装有动力电池、各类传感器、通讯系统、舵轮控制系统、电动和/或液压控制系统等控制系统,其底部安装有舵轮和从动轮;所述低底盘的底部安装有舵轮和从动轮。
26、在本发明一些实施例中,所述定位搬运小车的站立式车头上设置有控制台;所述控制台用以操作人员对所述定位搬运小车实施人工辅助控制。
27、在本发明一些实施例中,在站立式车头的外侧下部安装折叠板,当无需人工操作控制台时,折叠板折叠在站立式车头侧面,当需要人工操作控制台时,可翻折折叠板供操作员站立。
28、当遇到作业难度高、通过定位无法精准作业的时候,可由定位操作人员介入,通过控制台控制定位搬运小车的精准定位。
29、结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
本文地址:https://www.jishuxx.com/zhuanli/20240905/288674.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。