一种无人机通感融合系统轨迹优化及用户关联方法
- 国知局
- 2024-09-11 14:20:53
本发明属于无线通信,涉及一种无人机通感融合系统轨迹优化及用户关联方法。
背景技术:
1、无人机因具有机动性高、成本低、隐蔽性强及易部署等优点,在军事及民用领域均得到广泛应用,可承担侦察探测、跟踪定位、精确制导、电磁干扰、物资投放等多类型任务。无人机通信感知一体化是实现多机协同高精度、灵活目标感知、高效信息交互的重要技术基础。然而,无人机通信感知一体化系统面临通信与感知功能对于频谱、功率及时隙等多维资源的竞争,以及通信与感知系统内部及系统间的干扰,如何设计无人机飞行轨迹及用户关联策略,实现通信感知系统性能优化是亟待解决的问题。
2、目前已有文献研究无人机通信感知一体化问题,如有文献基于感知系统接收端信干噪比限制条件,设计波束成形方案,以实现通信系统传输速率优化;有文献在满足通信系统可容忍干扰约束条件下,设计感知系统的发送信号,以实现感知系统信干噪比优化,然而,现有研究较少考虑多无人机多天线通信感知系统的联合波束成形及轨迹设计问题,以及满足通信约束的感知性能优化,导致系统性能受限。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种无人机通感融合系统轨迹优化及用户关联方法。针对包含m架多天线无人机、n个单天线用户、1个地面移动目标和一个基站的系统场景,建模目标估计克拉美罗下界最小化为优化目标,实现无人机飞行轨迹、波束成形以及用户关联策略的联合优化。
2、为达到上述目的,本发明提供如下技术方案:
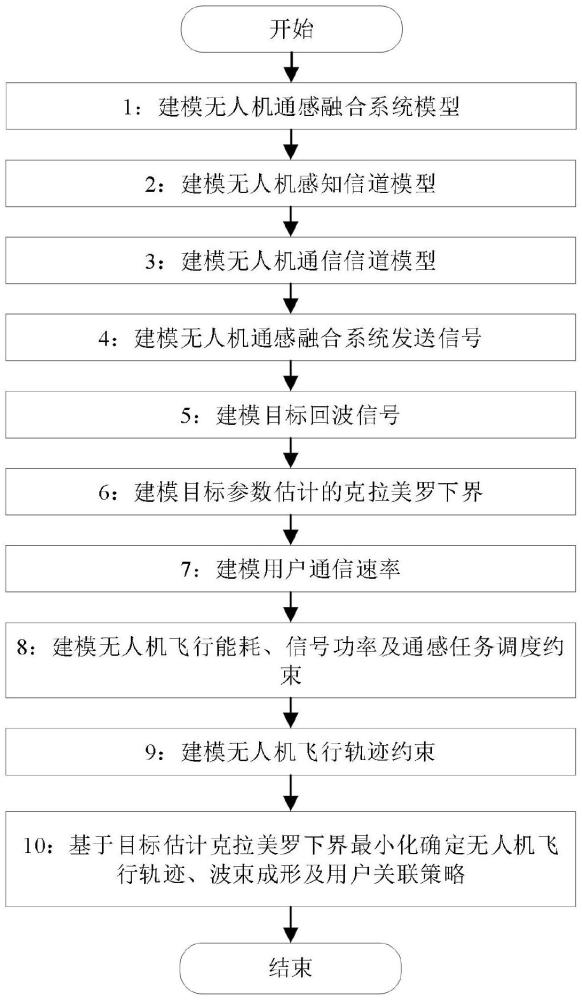
3、一种无人机通感融合系统轨迹优化及用户关联方法,针对m架多天线无人机、n个单天线用户、1个地面移动目标和一个基站的系统场景,具体包括以下步骤:
4、s1:建模无人机通感融合系统模型;
5、s2:建模无人机感知信道模型;
6、s3:建模无人机通信信道模型;
7、s4:建模无人机通感融合系统发送信号;
8、s5:建模目标回波信号;
9、s6:建模目标参数估计的克拉美罗下界;
10、s7:建模用户通信速率;
11、s8:建模无人机飞行能耗、信号功率及通感任务约束;
12、s9:建模无人机飞行轨迹约束;
13、s10:基于目标估计克拉美罗下界最小化确定无人机飞行轨迹、波束成形及用户关联策略;
14、进一步,步骤s1中,建模无人机通感融合系统模型,具体包括:系统包含m架多天线无人机、n个单天线用户、1个地面移动目标和一个基站,每架无人机天线数为l;用户及目标均分布在地面区域内;无人机从起点出发,在飞行过程中与用户通信,且对移动目标进行跟踪感知,并将所感知的数据传输至基站;令表示用户n的位置,1≤n≤n;基站位置为qb=[xb,yb]t;将系统时间划分成t个时隙,时隙长度为τ,将每个时隙均分成通感子时隙和上行通信子时隙;在通感子时隙,无人机发送通感融合信号与用户通信,感知目标信息,并接收目标的回波信号;在上行通信子时隙,无人机将所感知的目标信息发送至基站;令qm(t)=[um(t),hm(t)]t表示无人机m在时隙t的位置,其中um(t)=[xm(t),ym(t)]t代表时隙t无人机m的二维位置坐标,hm(t)为无人机m在时隙t的飞行高度,hmin≤hm(t)≤hmax,hmin和hmax分别表示无人机飞行的最低和最高高度;令w0(t)=[x0(t),y0(t)]t表示目标在时隙t的位置。
15、进一步,步骤s2中,建模无人机感知信道模型,具体包括:假设无人机与目标间链路模型为概率视距链路模型,则无人机m在时隙t与目标间的视距链路概率建模为:
16、
17、其中,a和b为恒定参数,由信号传输环境决定;为时隙t目标到无人机m的仰角,为时隙t目标与无人机m之间的距离;时隙t无人机m与目标间的非视距链路概率令表示时隙t无人机m与目标之间的感知信道矢量,可建模为:
18、
19、其中为反射系数,σrcs为目标雷达截面;为时隙t无人机m感知目标时的导向矢量,其中d为天线间距,λ为载波波长;κ<1为非视距条件下的附加衰减因子;为感知信道非视距增益矢量,建模为均值为0,方差为1的复高斯随机变量。
20、进一步,步骤s3中,建模无人机通信信道模型,具体包括:无人机通信信道包括无人机与用户间的通信信道以及无人机传输感知数据至基站的通信信道;假设无人机与用户间链路模型为概率视距链路模型,则无人机m在时隙t与用户n间的视距链路概率建模为:
21、
22、其中为时隙t用户n与无人机m之间的仰角,为时隙t无人机m与用户n之间的距离;时隙t无人机m与用户n间的非视距链路概率令表示时隙t无人机m与用户n之间的通信信道矢量,可建模为:
23、
24、其中β0为单位距离信道功率增益;为无人机m在时隙t与用户n通信的导向矢量;为时隙t用户n与无人机m之间的非视距增益矢量,建模为均值为0,方差为1的复高斯随机变量;无人机与基站间链路模型建模为概率视距链路模型,无人机m在时隙t与基站间的视距链路概率建模为:
25、
26、其中为时隙t基站到无人机m的仰角,为时隙t基站与无人机m之间的距离;时隙t无人机m与基站间的非视距链路概率令表示时隙t无人机m与基站之间的通信信道矢量,可建模为:
27、
28、其中为无人机m在时隙t与基站通信的导向矢量;为时隙t基站与无人机m之间的非视距增益矢量,建模为均值为0,方差为1的复高斯随机变量。
29、进一步,步骤s4中,建模无人机通感融合系统发送信号,具体包括:通感子时隙无人机的发送信号由通信与感知信号组成,令xm(t)表示无人机m在时隙t的通感子时隙发送的通信及感知信号之和,可建模为:其中,λm,n(t)∈{0,1}为用户关联变量,λm,n(t)=1表示无人机m在时隙t与用户n通信,反之λm,n(t)=0;为无人机感知变量,表示无人机m在时隙t进行目标感知,反之为无人机m在时隙t与用户n通信时所采用的波束成形矢量,cn为用户n的通信信号,令e[|cn|2]=1;为无人机m在时隙t对目标进行感知时所采用的波束成形矢量,s为目标感知信号,令
30、进一步,步骤s5中,建模目标回波信号,具体包括:无人机可采用干扰消除方法消除通信信号对目标回波信号的干扰,无人机m在时隙t接收的来自目标的回波信号可表示为:
31、
32、其中n代表无人机m接收回波信号中的高斯白噪声。
33、进一步,步骤s6中,建模目标参数估计的克拉美罗下界,具体包括:根据目标回波信号可估计目标的参数对应目标参数估计的克拉美罗下界可表示为:
34、
35、其中σ2为噪声功率;
36、进一步,步骤s7中,建模用户通信速率,具体包括:假定时隙t无人机m与用户n通信,则用户n的接收信号功率为:用户n收到的来自同无人机下其他用户的干扰功率可表示为:来自其他无人机的干扰功率可表示为:用户n收到的来自感知信号的干扰可表示为:时隙t用户n与无人机m间的信干噪比可表示为:
37、
38、用户n的平均通信速率可表示为:
39、进一步,步骤s8中,建模无人机飞行能耗、信号功率及通感任务约束,具体包括:令表示无人机m飞行所消耗能量,可以建模为:其中,表示无人机m在时隙t飞行所需推进功率,可建模为:无人机m飞行能耗约束可表示为:为无人机m的最大可用能量;无人机m在任意时隙内的发送信号功率需低于给定最大功率该约束可建模为:
40、
41、其中代表时隙t无人机m与基站通信所采用的波束成形矢量;无人机与用户间通信的传输速率需满足最小速率约束:任意时隙每个用户最多与一架无人机进行通信,该约束可以表示为:任意时隙每个无人机最多服务q个用户,该约束可以表示为:任意时隙内,目标最多被一架无人机感知,该约束可表示为:
42、进一步,步骤s9中,建模无人机飞行轨迹约束,具体包括:无人机飞行不得超过最大速率约束,令和分别表示无人机的水平与垂直方向的最大速率,则无人机飞行速率约束可建模为:为防止无人机之间的碰撞,建模约束条件:dmin表示无人机碰撞避免所需最小安全距离;所有无人机均从同一起点q(0)出发。
43、进一步,步骤s10中,基于目标估计克拉美罗下界最小化确定无人机飞行轨迹、波束成形及用户关联策略,具体包括:基于克拉美罗下界最小化,在满足用户通信速率需求等约束条件下确定无人机飞行轨迹qm(t)、波束成形策略及ws,m(t)、用户关联策略λm,n(t),即:
44、
45、其中分别为最优通信波束成形、感知波束成形、无人机飞行轨迹、用户关联变量。
46、本发明的有益效果在于:本发明针对包含多架多天线无人机、多个单天线用户、1个地面移动目标和一个基站的系统场景,建模目标估计克拉美罗下界最小化为优化目标,实现无人机飞行轨迹、波束成形以及用户关联策略的联合优化。
47、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290301.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。