手部外骨骼设备
- 国知局
- 2024-09-11 14:21:10
本发明涉及机械外骨骼,尤其涉及一种手部外骨骼设备。
背景技术:
1、随着科技的快速发展和人口老龄化的加剧,手部运动功能障碍已成为一个日益严重的社会问题。无论是因肢体残疾、老年性肌肉退化还是因疾病(如中风)导致的神经损伤,手部运动功能的损失都会对个体的日常生活造成严重影响。针对这一问题,传统的手部康复治疗方法虽然在一定程度上有所成效,但受限于医生的经验和技能,其训练效率和效果往往不尽如人意。因此,开发一种能够辅助手部康复训练和提供助力的手部外骨骼机器人显得尤为迫切。
2、目前,市面上的手部外骨骼机器人大多存在以下问题:大多数手部外骨骼机器人缺乏内收外展的自由度,且难以实现对所有手指关节的驱动,这限制了其在复杂手部运动中的应用。由于机械设计和控制算法的限制,现有手部外骨骼机器人在运动控制精度上往往无法满足高精度康复训练的需求。
技术实现思路
1、本发明实施例提供一种手部外骨骼设备,用于解决现有手部外骨骼机器人缺乏内收外展的自由度,且难以实现对所有手指关节的驱动,以及运动控制精度上无法满足高精度康复训练的需求的问题。
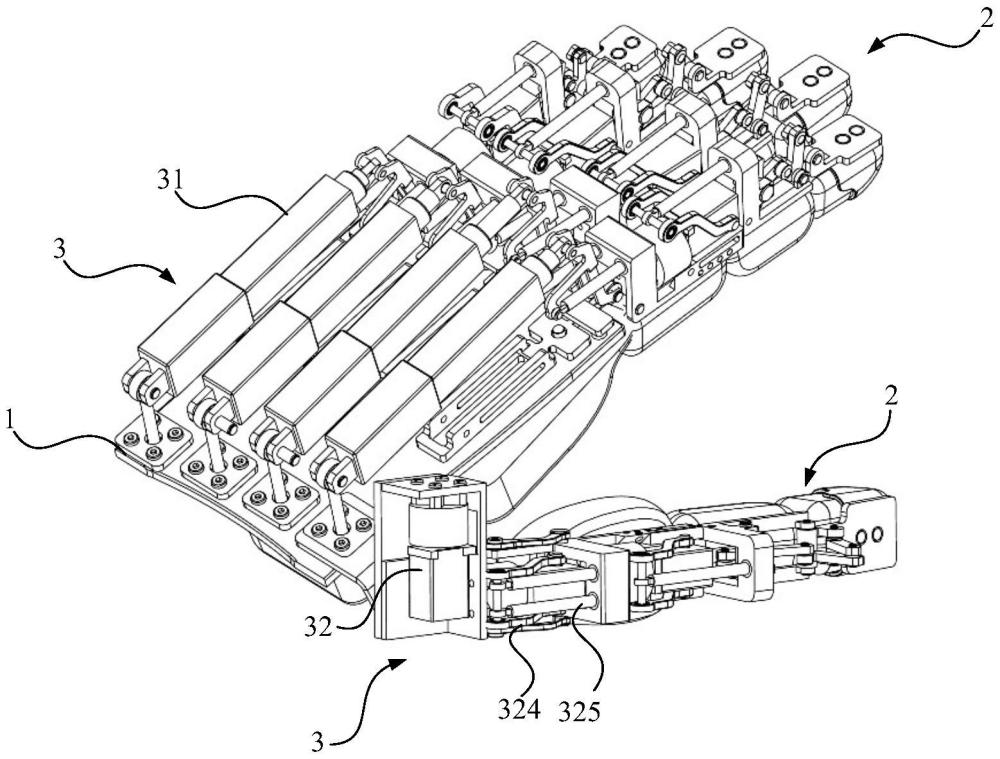
2、本发明实施例提供一种手部外骨骼设备,包括:
3、手背安装基座,用于穿戴在人体的手掌的背面;
4、指关节机构,可转动地设置在所述手背安装基座上,以实现手指的内收外展过程;所述指关节机构包括多个依次可转动连接的指节基座和第一驱动件,各所述指节基座用于穿戴于人体对应的手指关节上,所述第一驱动件与对应的所述指节基座传动连接,所述第一驱动件用于驱动其中至少一所述指节基座相对于其相邻的所述指节基座旋转,以实现手指的屈曲伸展过程;
5、第二驱动件,与邻近所述手背安装基座的所述指节基座连接,用于驱动全部所述指节基座相对于所述手背安装基座旋转。
6、根据本发明一个实施例提供的手部外骨骼设备,所述指关节机构设有五个,分别对应穿戴于人体的大拇指、食指、中指、环指和小拇指。
7、根据本发明一个实施例提供的手部外骨骼设备,所述第二驱动件设有五个,分别为四个直线电机组件和第一微电机组件;
8、四个所述直线电机组件分别与穿戴于人体的食指、中指、环指和小拇指的所述指关节机构连接;所述第一微电机组件与穿戴于人体的大拇指的所述指关节机构连接。
9、根据本发明一个实施例提供的手部外骨骼设备,所述直线电机组件包括:电机连接轴、第一旋转轴承、第二旋转轴承、手背基座、第一连杆、第一滑杆、手指基座盖板和直线电机;
10、所述第一旋转轴承的内圈与所述手背安装基座连接,所述第一旋转轴承的外圈与所述手背基座连接,所述手指基座盖板设置在手背基座上,用于限制所述手背基座的转动范围;所述直线电机通过所述第一连杆和所述第一滑杆与所述手背基座连接,所述直线电机通过所述电机连接轴和所述第二旋转轴承与所述手背安装基座连接,所述手背基座与穿戴于人体的食指、中指、环指和小拇指的所述指关节机构连接,以通过所述直线电机驱动所述指关节机构相对于所述手背安装基座旋转。
11、根据本发明一个实施例提供的手部外骨骼设备,所述直线电机的伸出杆上设有鱼眼孔,所述第一连杆的一端可转动地连接在所述鱼眼孔中。
12、根据本发明一个实施例提供的手部外骨骼设备,所述指关节机构包括:近掌端指节基座、远掌端指节基座、第二连杆、第二滑杆;所述第一驱动件包括第二微电机结构;所述近掌端指节基座与所述远掌端指节基座可转动地连接,所述第二微电机结构设置在所述近掌端指节基座上,所述第二微电机结构通过所述第二连杆和所述第二滑杆与所述远掌端指节基座连接。
13、根据本发明一个实施例提供的手部外骨骼设备,所述指关节机构还包括:指尖指节基座、连杆组件和弹性连接绳;
14、所述弹性连接绳的一端与所述近掌端指节基座,所述弹性绳的另一端通过所述连杆组件与所述指尖指节基座传动连接,以在所述近掌端指节基座和所述远掌端指节基座相对转动的过程中,带动所述指尖指节基座转动。
15、根据本发明一个实施例提供的手部外骨骼设备,所述连杆组件包括:第三连杆、第四连杆、第五连杆和第六连杆;所述弹性连接绳依次通过所述第三连杆、所述第四连杆、所述第五连杆和所述第六连杆与所述指尖指节基座传动连接。
16、根据本发明一个实施例提供的手部外骨骼设备,所述第一微电机组件包括:第一微电机结构、固定基座、旋转基座;
17、所述第一微电机结构设置在所述旋转基座上,所述固定基座连接在所述手背安装基座上,所述旋转基座与所述指关节机构连接,所述第一微电机结构用于驱动所述旋转基座相对于所述固定基座旋转。
18、根据本发明一个实施例提供的手部外骨骼设备,所述第一微电机组件还包括:第七连杆和第三滑杆;所述旋转基座通过所述第七连杆和所述第三滑杆与所述指关节机构传动连接。
19、本发明提供的手部外骨骼设备,结构紧凑、体积小、关节辅助幅度大、可完成各种动作姿态。具有较高的自动化水平、较好的力量转移效率,可以进行较高的重复、高强度的康复训练、灵活的手部。能够更好地满足手部运动功能障碍患者的康复训练需求。该手部外骨骼设备可以实现主动驱动大拇指、食指、中指、无名指和小拇指进行屈曲伸展运动,一共包含16个主动自由度和4个被动自由度,具有全自由度,保证了外骨骼手的灵活。
技术特征:1.一种手部外骨骼设备,其特征在于,包括:
2.根据权利要求1所述的手部外骨骼设备,其特征在于,所述指关节机构设有五个,分别对应穿戴于人体的大拇指、食指、中指、环指和小拇指。
3.根据权利要求2所述的手部外骨骼设备,其特征在于,所述第二驱动件设有五个,分别为四个直线电机组件和第一微电机组件;
4.根据权利要求3所述的手部外骨骼设备,其特征在于,所述直线电机组件包括:电机连接轴、第一旋转轴承、第二旋转轴承、手背基座、第一连杆、第一滑杆、手指基座盖板和直线电机;
5.根据权利要求4所述的手部外骨骼设备,其特征在于,所述直线电机的伸出杆上设有鱼眼孔,所述第一连杆的一端可转动地连接在所述鱼眼孔中。
6.根据权利要求1所述的手部外骨骼设备,其特征在于,所述指关节机构包括:近掌端指节基座、远掌端指节基座、第二连杆、第二滑杆;所述第一驱动件包括第二微电机结构;所述近掌端指节基座与所述远掌端指节基座可转动地连接,所述第二微电机结构设置在所述近掌端指节基座上,所述第二微电机结构通过所述第二连杆和所述第二滑杆与所述远掌端指节基座连接。
7.根据权利要求6所述的手部外骨骼设备,其特征在于,所述指关节机构还包括:指尖指节基座、连杆组件和弹性连接绳;
8.根据权利要求7所述的手部外骨骼设备,其特征在于,所述连杆组件包括:第三连杆、第四连杆、第五连杆和第六连杆;所述弹性连接绳依次通过所述第三连杆、所述第四连杆、所述第五连杆和所述第六连杆与所述指尖指节基座传动连接。
9.根据权利要求3所述的手部外骨骼设备,其特征在于,所述第一微电机组件包括:第一微电机结构、固定基座、旋转基座;
10.根据权利要求9所述的手部外骨骼设备,其特征在于,所述第一微电机组件还包括:第七连杆和第三滑杆;所述旋转基座通过所述第七连杆和所述第三滑杆与所述指关节机构传动连接。
技术总结本发明提供一种手部外骨骼设备,包括:手背安装基座,用于穿戴在人体的手掌的背面;指关节机构,可转动地设置在手背安装基座上;指关节机构包括多个依次可转动连接的指节基座和第一驱动件,各指节基座用于穿戴于人体对应的手指关节上,第一驱动件与对应的指节基座传动连接,用于驱动其中至少一指节基座相对于其相邻的指节基座旋转;第二驱动件,与邻近手背安装基座的指节基座连接,用于驱动全部指节基座相对于手背安装基座旋转。整体结构紧凑,关节辅助幅度大、可完成各种动作姿态。本发明具有较高的自动化水平、较好的力量转移效率,可以进行高重复、高强度的康复训练、灵活的手部运动辅助。能够更好地满足手部运动功能障碍患者的康复训练需求。技术研发人员:邹永向,程龙,张煜,李正伟,孙宁,韩立君,李伟,李厚成,刘泽宇受保护的技术使用者:中国科学院自动化研究所技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290347.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表