一种用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法与流程
- 国知局
- 2024-09-11 14:21:21
本发明涉及桥梁钢绞线索张拉,具体涉及一种用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法。
背景技术:
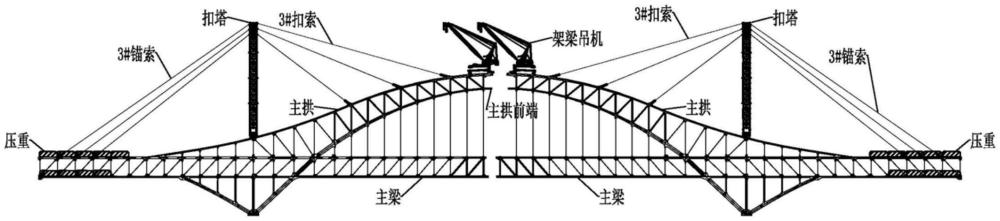
1、钢桁拱桥以其竖向刚度大、承载能力高、跨越能力强、施工速度快、造型优美等特点,在国内外新建公路及铁路桥梁中得到了广泛应用。大跨钢桁拱桥跨中施工时,为控制结构内力和线形,往往辅助以大型斜拉扣挂系统,设一至三对扣锚索。钢梁架设若干节间,张拉一对扣锚索,钢梁再施工若干节,再张拉第二对扣锚索,按此工序下去,完成钢桁拱桥主拱的架设和斜拉扣挂系统的挂设张拉。通过张拉扣锚索,一方面为了控制主桁大悬臂施工时结构内力,另一方面主要还是为了将钢梁前端标高上抬至理论目标值,为主拱无应力合龙打下基础。
2、目前斜拉扣挂系统扣锚索形式包括平行线钢绞线索和平行钢丝索,若采用平行钢绞线斜拉索,以单根钢绞线为单元进行挂设和张拉,对设备要求低,操作方便,在大吨位斜拉索中应用较多。针对单根张拉工艺的平行钢绞线索,目前通常采用等值法张拉来控制其索力。该方法中通常需针对大桥建立有限元模型,进行施工过程计算,得出各索的张拉理论序列力。实际张拉时选定第一根索为基准索,将基准索按照理论值张拉到位,后续钢绞线张拉时,同时用索力传感器测试基准索和当前张拉的索,当当前张拉索索力和基准索索力相等时,完成当前索的张拉。采用该方法有一定的局限性:一是要求精确计算出基准索索力,由于实际情况的复杂性,如扣塔初始偏位、扣锚索的扣锚点安装精度、临时荷载、杆件制造和安装精度偏差等因素影响,很难得出准确的基准索索力;二是张拉过程中受温度、环境风荷载的影响,当前张拉索力不仅和基准索力存在一定偏差,还和理论序列张拉力也存在一定偏差;三是由于实际结构刚度和理论刚度的偏差影响,将导致张拉时,悬臂端标高上抬量和理论标高上抬量也会存在较大偏差。因此采用等值法张拉,难以保证索力的不均匀性,结构上抬量达不到理论目标值,最终将导致拱肋难以无应力合龙等问题。
技术实现思路
1、本发明的目的就是针对现有技术的缺陷,提供一种用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,通过此方法可以解决因各种误差影响而导致的索力不均匀性,确保张拉完索力逼近理论值,也确保索张拉后主拱上抬至理论目标值,从而实现主拱的无应力合龙。
2、为了解决上述技术问题,本发明提供一种用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,包括:
3、s1、挂设并预紧扣索和锚索中的每根钢绞线,扣索和锚索的预紧力为f,测量预紧后桥梁的主拱前端的标高h0;
4、s2、建立桥梁的张拉过程有限元模型,对张拉过程有限元模型中的扣索和锚索采用相同预紧力f进行预紧,计算预紧后主拱前端的理论标高h′0;
5、s3、在张拉过程有限元模型中按100%设计拉索力对扣索和锚索进行张拉,计算张拉后主拱前端的理论标高h,按100%设计拉索力张拉后主拱前端的理论标高变化量△h=h-h′0;设i=1,由张拉过程中有限元模型计算得到扣索和锚索的各根钢绞线的第i次张拉理论序列力;
6、s4、按照第i次张拉理论序列力对实际的扣索和锚索进行张拉;
7、s5、测量第i次张拉后主拱前端的实际高hi;
8、s6、计算误差δi=(△h-△hi)/△h,其中,△hi=hi-h0,△hi为第i次张拉后主拱前端的实际高变化量;判断δi是否满足误差要求,若满足,则说明张拉到位,若不满足,则执行步骤s7;
9、s7、根据δi修正张拉过程有限元模型,令i=i+1,重新计算第i次张拉理论序列力,重复步骤s4~s6。
10、进一步地,步骤s7包括:
11、s71、将张拉过程有限元模型的扣索和锚索的张拉力由100%设计拉索力修正为(1-δi)×设计拉索力,令i=i+1;
12、s72、增加重新按100%设计拉索力张拉扣索和锚索的工况,并以该工况计算第i次张拉理论序列力;
13、s73、重复步骤s4~s6。
14、进一步地,步骤s6中,误差要求为-5%≤δi≤5%。
15、进一步地,步骤s1中,扣索或锚索的钢绞线有j×k根,即扣索或锚索包括j束钢绞线单元,每束钢绞线单元包括k根钢绞线。
16、进一步地,步骤s1中,钢绞线的张拉施工工序为:先张拉内侧的钢绞线单元,再张拉外侧的钢绞线单元,将对称的两个钢绞线单元中对称的m根钢绞线作为一组钢绞线,每次张拉一组钢绞线,共张拉j×k/m次。
17、进一步地,步骤s3中,各个钢绞线的第i次张拉理论序列力为tii、t2i、t3i、……tni,其中,tni表示第n组钢绞线的第i次张拉理论力,n=j×k/m。
18、进一步地,步骤s2中,张拉过程有限元模型考虑斜拉扣挂系统耦合作用。
19、本发明的有益效果为:
20、1.本发明通过多次张拉,以结构实测标高变化量和理论变化量偏差为基准,对张拉过程有限元模型进行修正,调整张拉理论力,使得最终张拉标高上抬量逼近理论变化量,在多次张拉逼近的过程中,各索索力也趋于均匀,从而实现主拱的无应力合龙,施工完成成桥线形即可达到设计理论成桥线形,施工过程可控,保证了施工质量。
21、2、本发明适用于单根张拉工艺的斜拉扣挂系统钢绞线索,操作方便可行。
22、3、本发明无需精确测试扣索和锚索的锚点坐标,也不需要考虑风荷载、温度荷载等的影响,通过直接测试标高变化量误差对有限元模型进行修正即可获得张拉理论力,来指导施工现场。
23、4、本发明先将扣索和锚索全部挂设并预紧,然后再张拉,不需要一边挂设一边张拉,并且根据实际施工情况,张拉两到三次即可张拉到位,提高了施工功效。
24、5、本发明可以确保钢梁标高张拉完成后到理论标高,后期不再需要调索,节约工期,经济性好。
技术特征:1.一种用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:包括:
2.根据权利要求1所述的用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:步骤s7包括:
3.根据权利要求1或2所述的用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:步骤s6中,误差要求为-5%≤δi≤5%。
4.根据权利要求1或2所述的用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:步骤s1中,扣索或锚索的钢绞线有j×k根,即扣索或锚索包括j束钢绞线单元,每束钢绞线单元包括k根钢绞线。
5.根据权利要求4所述的用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:步骤s1中,钢绞线的张拉施工工序为:先张拉内侧的钢绞线单元,再张拉外侧的钢绞线单元,将对称的两个钢绞线单元中对称的m根钢绞线作为一组钢绞线,每次张拉一组钢绞线,共张拉j×k/m次。
6.根据权利要求5所述的用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:步骤s3中,各个钢绞线的第i次张拉理论序列力为tii、t2i、t3i、……tni,其中,tni表示第n组钢绞线的第i次张拉理论力,n=j×k/m。
7.根据权利要求1或2所述的用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,其特征在于:步骤s2中,张拉过程有限元模型考虑斜拉扣挂系统耦合作用。
技术总结本发明提供一种用于斜拉扣挂系统钢绞线索单根张拉的索力控制方法,包括:S1、挂设并预紧扣索和锚索,测量主拱前端的标高H<subgt;0</subgt;;S2、建立张拉过程有限元模型,计算预紧后主拱前端的理论标高H′<subgt;0</subgt;;S3、在张拉过程有限元模型中按100%设计拉索力进行张拉,计算张拉后主拱前端的理论标高H,理论标高变化量△H=H‑H′<subgt;0</subgt;;设i=1,计算第i次张拉理论序列力;S4、按照第i次张拉理论序列力对实际的扣索和锚索进行张拉;S5、测量主拱前端的实际高H<subgt;i</subgt;;S6、计算误差δ<subgt;i</subgt;=(△H‑△H<subgt;i</subgt;)/△H,其中,△H<subgt;i</subgt;=H<subgt;i</subgt;‑H<subgt;0</subgt;,△H<subgt;i</subgt;为第i次张拉后主拱前端的实际高变化量;判断δ<subgt;i</subgt;是否满足误差要求,若满足,则说明张拉到位。本发明可确保最终索力逼近理论值、主拱上抬至理论值,实现主拱无应力合龙。技术研发人员:张国志,周仁忠,种爱秀,康学云,游新鹏,彭成明,朱浩,王紫超,李浩,唐震,刘华龙,周胜国,穆文均受保护的技术使用者:中交第二航务工程局有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/290365.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表