一种山谷地形低空高效飞行的航路优化方法与流程
- 国知局
- 2024-09-11 14:34:11
本发明涉及路径规划领域,具体地,涉及一种山谷地形低空高效飞行的航路优化方法。
背景技术:
1、无人机在山谷地形环境中执行任务时,常常面临由于地形复杂性和不稳定的气象条件带来的多重挑战。山谷地形独特的地理特征,如变化多端的高度、陡峭的悬崖和不规则的山脊,对飞行路径规划提出了更高的需求,使得路径规划成为一项极具挑战性的任务。
2、传统的飞行路径规划技术主要依赖于避障算法和简单的点对点导航策略。虽然这些方法在开阔或相对平坦的地形中能提供有效导航,但在复杂的山谷环境中,它们往往无法准确预测和应对由地形引起的潜在风险。此外,这些传统方法在考虑飞行动力学约束和稳定性优化方面也显示出明显不足,特别是在需要长时间飞行和环境复杂性的场景中。
3、近年来,虽然基于启发式搜索的高级路径规划算法,如a*算法,已被提出以优化路径选择,考虑了飞行成本和飞行时间等因素,但这些算法在处理山谷地形环境特有的三维空间复杂性时仍有局限。此外,现有的a*算法实现通常采用简化的启发式函数,未能有效地考虑地形障碍和飞行安全的动态约束。
4、因此,现有无人机路径规划方法在山谷地形进行航路规划过程中存在的效率低和平稳性差的问题。
技术实现思路
1、本发明目的为解决现有无人机路径规划方法在山谷地形进行航路规划过程中存在的效率低和平稳性差的问题。
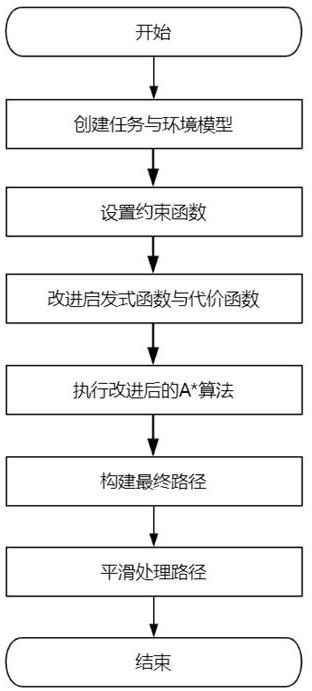
2、为实现上述发明目的,本发明提供了一种山谷地形低空高效飞行的航路优化方法,所述方法包括:
3、步骤1:获得山谷地形数据,对山谷地形数据进行处理获得山谷地形三维网络空间模型;
4、步骤2:对a*搜寻算法进行改进,获得改进后的a*搜寻算法;
5、步骤3:获得起点坐标和终点坐标,基于起点坐标和终点坐标和山谷地形三维网络空间模型,利用改进后的a*搜寻算法进行路径规划,生成无人机飞行路径;
6、其中,对a*搜寻算法进行改进包括:
7、基于山谷地形数据设置飞行安全约束对应的约束函数;
8、基于加权欧式距离函数d、地形适应代价函数t、风险规避代价函数r以及转角成本turn_penalty,对a*搜寻算法的成本函数进行改进;
9、基于欧式距离函数distance、地形变化成本terrain_cost和转向成本turn_cost,对a*搜寻算法的启发式函数改进。
10、其中,本方法基于改进的a*算法,利用高度压缩因子和降采样因子处理地形数据,构建三维布尔数组以表示可访问空间。通过改进的成本函数和启发式函数结合安全性评估和动力学模型,能够准确反映飞行成本和环境约束。该方法对路径节点的选择进行安全性和稳定性评估,并通过路径平滑处理来提高路径的连续性。
11、改进的a*算法通过优化地形数据处理和路径规划,提高了路径计算的效率和精度。改进后的成本函数和启发式函数能够更准确地反映实际飞行环境和成本,使得路径选择更加科学合理。结合动力学模型和安全性评估,能够确保路径的安全性和稳定性。通过路径平滑处理,可以减少飞行中的震荡和能量消耗,从而提高飞行效率和稳定性。这些改进共同实现了在复杂山谷地形中低空高效飞行路径的优化,显著提高了飞行效率,并增强了飞行的安全性和稳定性。
12、优选的,所述步骤1具体包括:
13、获得山谷地形数据,基于数字高程模型对山谷地形数据中的海拔数据进行缩放和对山谷地形数据中的经纬度数据进行下采样处理,获得山谷地形三维网络空间模型。从而在维持地形特征的同时减少数据量。
14、优选的,飞行安全约束对应的约束函数包括:
15、;
16、;
17、;
18、;
19、;
20、其中,x、y和z分别表示邻居节点所在横坐标、纵坐标以及高度的坐标值,dx、dy和dz分别表示当前节点到邻居节点在横坐标、纵坐标以及高度的距离差异值,habs为最大绝对高度限制,zground为邻居节点所在坐标的地形海拔高度,hmax_rel为最大相对高度限制,hmin_rel为最小相对高度限制,xhor与yhor分别表示距离邻居节点最近的地形的横坐标与纵坐标,dhor为规定的最小水平距离限制,yaw_max与pitch_max分别表示俯仰角与偏航角的最大变化值。
21、优选的,改进后的a*搜寻算法的成本函数为:
22、;
23、其中,gscore为改进后的a*搜寻算法的成本函数,d为加权欧式距离函数,t为地形适应代价函数,r为风险规避代价函数,turn_penalty为转角成本,gscore[current]表示从起点到当前节点累积的实际路径成本。
24、优选的,加权欧式距离函数为:
25、;
26、地形适应代价函数为:
27、;
28、风险规避代价函数为:
29、;
30、其中,dx、dy和dz分别表示当前节点到邻居节点在横坐标、纵坐标以及高度的距离差异值,wx、wy和wz分别表示当前节点到邻居节点在横坐标、纵坐标和高度的距离差异权重值,ct表示地形适应代价的权重值,distance_to_obstacle表示邻居节点与最近的地形障碍物之间的距离,threshold表示距离阈值,cr表示风险规避代价的权重值;
31、转角成本函数为:
32、;
33、;
34、其中,x、y和z分别表示邻居节点所在横坐标、纵坐标以及高度的坐标值,xv、yv和zv表示前一个节点所在横坐标、纵坐标以及高度的坐标值,xc、yc和zc表示当前节点所在横坐标、纵坐标以及高度的坐标值,表示前一个节点到当前节点的方向,表示当前节点到邻居节点的方向,smoothness为平稳度参数。
35、优选的,改进后的a*搜寻算法的启发式函数为:
36、;
37、其中,hscore为启发式函数,distance为欧式距离函数,terrain_cost为地形变化成本,turn_cost为转向成本。
38、优选的,欧式距离函数为:
39、;
40、转向成本为:
41、;
42、地形变化成本为:
43、;
44、其中,
45、;
46、;
47、其中,x、y和z分别表示邻居节点所在横坐标、纵坐标以及高度的坐标值,dx和dy分别表示当前节点到邻居节点在横坐标和纵坐标的距离差异值,goalx、goaly和goalz分别表示目标节点的横坐标、纵坐标和高度的坐标值,e为自然底数,yawrate与pitchrate分别表示偏航角与俯仰角的归一化因子,qt表示地形变化成本系数,tyaw为归一化偏航角,tpitch为归一化俯仰角。
48、优选的,所述方法还包括步骤4:对生成的无人机飞行路径进行平滑处理。
49、优选的,改进后的a*搜寻算法的流程为:
50、步骤a:开始;
51、步骤b:将起点添加到存储候选节点列表中;
52、步骤c:判断存储候选节点列表是否为空,若存储候选节点列表为空,则返回未找到路径,并结束流程;若存储候选节点列表不为空,则执行步骤d;
53、步骤d:在存储候选节点列表中寻找评价函数值最小的节点;若找到评价函数值最小的节点,则沿着目标节点的父节点回溯生成路径,然后结束流程;若未找到评价函数值最小的节点;则将当前节点添加到存储已经走过的节点列表中,然后执行步骤e;
54、步骤e:选择当前节点的其中一个邻居节点;
55、步骤f:判断被选择邻居节点是否可达,若该邻居节点不可达,则判断当前节点的所有邻居节点是否均已被遍历;若当前节点的所有邻居节点未被遍历,则返回步骤e;若当前节点的所有邻居节点被遍历,则返回执行步骤c;若该邻居节点可达,则执行步骤g;
56、步骤g:判断该邻居节点是否位于绝对高度之内;若该邻居节点没有位于绝对高度之内,则判断当前节点的所有邻居节点是否均已被遍历;若当前节点的所有邻居节点未被遍历,则返回步骤e;若当前节点的所有邻居节点被遍历,则返回执行步骤c;若该邻居节点位于绝对高度之内,则执行步骤h;
57、步骤h:判断该邻居节点与最近障碍物的水平距离是否在限定的水平距离之内;若该邻居节点与最近障碍物的水平距离没有在限定的水平距离之内,则判断当前节点的所有邻居节点是否均已被遍历;若当前节点的所有邻居节点未被遍历,则返回步骤e;若当前节点的所有邻居节点被遍历,则返回执行步骤c;若该邻居节点与最近障碍物的水平距离在限定的水平距离之内,则执行步骤i;
58、步骤i:判断该邻居节点是否满足动力学约束;若该邻居节点不满足动力学约束,则判断当前节点的所有邻居节点是否均已被遍历;若当前节点的所有邻居节点未被遍历,则返回步骤e;若当前节点的所有邻居节点被遍历,则返回执行步骤c;若该邻居节点满足动力学约束,则执行步骤j;
59、步骤j:判断该邻居节点是否是存储已经走过的节点列表中的节点;若该邻居节点是存储已经走过的节点列表中的节点,则判断当前节点的所有邻居节点是否均已被遍历;若当前节点的所有邻居节点未被遍历,则返回步骤e;若当前节点的所有邻居节点被遍历,则返回执行步骤c;若该邻居节点不是存储已经走过的节点列表中的节点,则执行步骤k;
60、步骤k:判断该邻居节点是否是存储候选节点列表中的节点;若该邻居节点是存储候选节点列表中的节点,则判断该节点当前的评价函数值与该节点之前已保存的评价函数值相比是否变小;若该节点的评价函数值没有变小,则判断当前节点的所有邻居节点是否均已被遍历;若该节点的评价函数值变小,则更新该节点的评价函数值并将父节点设置为当前节点,然后判断当前节点的所有邻居节点是否均已被遍历;若当前节点的所有邻居节点未被遍历,则返回步骤e;若当前节点的所有邻居节点被遍历,则返回执行步骤c;若该邻居节点不是存储候选节点列表中的节点,则执行步骤l;
61、步骤l:将当前节点能直接到达且之前未被考虑过的邻居节点作为新节点,检查新节点,处理该新节点的评价函数、代价函数和距离评估函数,将父节点设置为该新节点,将父节点添加到存储候选节点列表中。
62、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
63、本方法能够增强无人机的路径规划稳定性、安全性和能效。
64、本方法提高在山谷地形环境中飞行的安全性和平稳性。
本文地址:https://www.jishuxx.com/zhuanli/20240911/291421.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表