一种基于改进U-Net网络架构的水下图像增强模型的构建方法与流程
- 国知局
- 2024-09-11 14:51:28
本发明涉及水下图像识别,特别是一种基于改进u-net网络架构的水下图像增强模型的构建方法。
背景技术:
1、为了更好地了解水下大坝或水电站的情况,提高对其内部结构和设备的检测与维护水平,获取准确的水下信息变得至关重要;而水下光学图像,作为传递这些水下信息的重要媒介,其作用不可忽视。然而,水下大坝或水电站内部的光线传播情况复杂。随着水深的增加,光线迅速衰减,使得水下的图像变得模糊不清,颜色黯淡。同时,水体对光线的折射和散射效应,会使得图像产生畸变,影响我们对物体真实位置和形状的判断。此外,水流、气泡以及悬浮颗粒物等噪声源,会进一步降低图像的质量和清晰度,使得水下图像常常处于一种蓝绿色的模糊状态。因此,尽管我们使用了水下机器视觉系统,但获取清晰的图像仍然是一项挑战。为了应对光线衰减的问题,通常需要采用特殊的光源和传感器,这无疑增加了我们探索和维护水下大坝或水电站的难度和成本。为了保证水下机器人等设备搭载的计算机视觉系统能正常工作,科研人员需要面对去除水下噪声、增强水下图像质量的挑战。这是为了确保我们能准确、高效地检测和维护水下大坝或水电站,从而保障其安全稳定的运行。
2、现有水下图像增强方法主要分为基于物理模型的方法、基于非物理模型的方法以及基于深度学习的方法。基于物理模型的水下图像增强方法主要侧重于准确估计透射率,利用估计的介质透射率和全局背景光等其他关键水下成像参数,通过物理水下成像模型反推获得清晰的图像。然而现有技术存在以下缺陷:
3、1,基于物理模型的方法的性能在现实水下场景中表现较差,这是因为对于复杂、动态的水下环境,模型假设并不总是合理,且同时评估多个模型参数具有较大难度;
4、2,大部分基于非物理模型的算法会导致图像过度增强和过度饱和;
5、3,大部分基于学习的方法都受限于数据集不足,而小规模数据集会大大降低模型训练的质量。
6、因此,需要设计一种基于改进u-net网络架构的水下图像增强模型的构建方法来解决上述问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于改进u-net网络架构的水下图像增强模型的构建方法,旨在解决现有技术的模型对于复杂动态的水下环境假设不合理,导致图像过渡增强、过饱和度,从而影响图像增强质量的问题,具有在保证网络结构轻量化的前提下,设计的模型效果仍能超越现有技术的特点。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种基于改进u-net网络架构的水下图像增强模型的构建方法,包括:
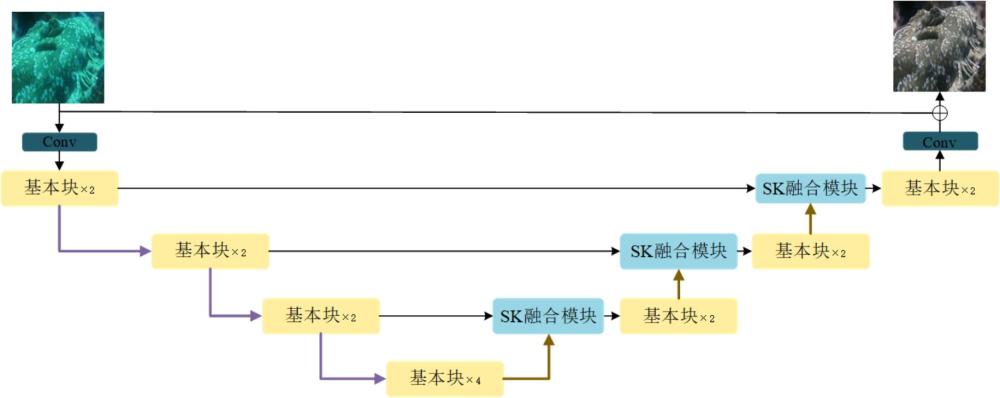
4、s1,通过点卷积和深度卷积替换u-net网络的标准卷积,从而构建基于u-net网络的图像增强模型网络架构,包括多个基本块和sk融合模块;
5、s2,构建基本块的结构;
6、s3,在构建的u-net网络基本块内部引入简化的通道注意力机制;
7、s4,构建sk融合模块的结构。
8、优选地,步骤s1中,基于u-net网络的图像增强模型网络架构为端到端结构,在每一层级生成大小不同的特征图,从而使得网络能够捕捉不同尺度的特征。
9、优选地,步骤s1中,基于u-net网络的图像增强模型网络架构包括七个阶段,每个阶段的基本块数量分别为2个、2个、2个、4个、2个、2个和2个。
10、优选地,步骤s1中,基于u-net网络的图像增强模型网络架构通过sk融合模块动态地融合来自不同路径的特征映射从而实现跳跃连接;
11、网络输入输出端分别串联一个尺寸为3×3的卷积层;
12、输入输出位置设置一个全局残差结构,提升网络的稳定性。
13、优选地,步骤s2中,基本块由两个连续的局部残差结构组成,基本块的结构为:
14、选用层标准化作为基本块的第一层,层归一化之后通过逐点卷积和深度卷积进行串联配合;
15、深度卷积核尺寸为3×3,对输入的每个通道进行单独的卷积操作;
16、逐点卷积核尺寸为1×1,进行单点上的特征提取;
17、激活函数选用高斯误差线性单元函数gelu。
18、优选地,步骤s3中,在构建的u-net网络基本块内部引入简化的通道注意力机制包括:
19、首先将空间信息压缩到通道中,然后对其应用多层感知来计算通道注意力,并将其用于加权特征图,公式表示为:
20、;
21、其中,表示特征图,表示将空间信息聚合到通道中的全局平均池化操作;为非线性激活函数sigmoid,、为全连通层,全连通层之间采用relu激活函数;最后,表示一个通道域点乘操作;
22、对通道注意力表达形式进行简化:
23、;
24、其中,表示特征图,通道注意力计算记为函数;
25、只保留通道注意中的全局信息和通道信息,将二者聚合得到简化的通道注意力机制:
26、;
27、得到简化的通道注意力机制sca。
28、优选地,步骤s4中,构建sk融合模块的结构包括将sk模块重新调整,得到sk融合模块:
29、设两个特征映射分别为和,其中为来自跳跃连接的特征映射,为来自网络主路径的特征映射;
30、先将输入逐点卷积层得到,再将与分别输入进全局平均池化层和多层感知结构,多层感知结构由降维卷积、relu激活函数和升维卷积组成;最后通过softmax函数得到融合权重,具体计算过程如下表示:
31、;
32、;
33、其中、为融合权重,为多层感知结构,为全局平均池化层,为特征融合结果。
34、本发明提供一种基于改进u-net网络架构的水下图像增强模型的构建方法的有益效果如下:
35、1,本发明广泛使用点卷积和深度卷积来替换传统卷积,有效地聚合空间信息和转换特征,并且减少计算量。在模型中引入sk融合模块动态融合全局信息,提升特征获取能力。
36、2,本发明在基本块内部大胆采用了简化的通道注意力机制,进一步提升网络提取通道信息的性能,同时减少计算量。
37、3,本发明在设计层标准化作为基本块的第一层,层归一化之后是逐点卷积和深度卷积的串联配合,可以压缩模型参数,加速计算过程,能够增强模型表现能力。
技术特征:1.一种基于改进u-net网络架构的水下图像增强模型的构建方法,其特征在于,包括:
2.根据权利要求1所述基于图像识别的水轮机组各进人门漏水检测方法,其特征在于,步骤s1中,基于u-net网络的图像增强模型网络架构为端到端结构,在每一层级生成大小不同的特征图,从而使得网络能够捕捉不同尺度的特征。
3.根据权利要求1所述基于图像识别的水轮机组各进人门漏水检测方法,其特征在于,步骤s1中,基于u-net网络的图像增强模型网络架构包括七个阶段,每个阶段的基本块数量分别为2个、2个、2个、4个、2个、2个和2个。
4.根据权利要求1所述基于图像识别的水轮机组各进人门漏水检测方法,其特征在于,步骤s1中,基于u-net网络的图像增强模型网络架构通过sk融合模块动态地融合来自不同路径的特征映射从而实现跳跃连接;
5.根据权利要求1所述基于图像识别的水轮机组各进人门漏水检测方法,其特征在于:步骤s2中,基本块由两个连续的局部残差结构组成,基本块的结构为:
6.根据权利要求1所述基于图像识别的水轮机组各进人门漏水检测方法,其特征在于:步骤s3中,在构建的u-net网络基本块内部引入简化的通道注意力机制包括:
7.根据权利要求1所述基于图像识别的水轮机组各进人门漏水检测方法,其特征在于:步骤s4中,构建sk融合模块的结构包括将sk模块重新调整,得到sk融合模块:
技术总结本发明公开了一种基于改进U‑Net网络架构的水下图像增强模型的构建方法,该方法首先通过点卷积和深度卷积替换U‑Net网络的标准卷积,从而构建基于U‑Net网络的图像增强模型网络架构,该模型架构包括多个基本块和SK融合模块;然后构建基本块的结构;随后在构建的U‑Net网络基本块内部引入简化的通道注意力机制;最后构建SK融合模块的结构,完成模型网络架构的构建;解决了现有技术的模型对于复杂动态的水下环境假设不合理,导致图像过渡增强、过饱和度,从而影响图像增强质量的问题,具有在保证网络结构轻量化的前提下,设计的模型效果仍能超越现有技术的特点。技术研发人员:李新宇,朱思思,万刚,耿在明,周旋,史朋飞,范新南,辛元雪,孙超受保护的技术使用者:中国长江电力股份有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292349.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表