一种光伏面板清洁方法与流程
- 国知局
- 2024-09-11 14:55:31
本发明涉及光伏设备清洁,特别是涉及一种光伏面板清洁方法。
背景技术:
1、光伏阵列(photovoltaic array)是由若干个光伏面板按一定方式组装在一起并且具有固定的支撑结构而构成的直流发电单元。它是最大规模的光伏发电系统。在有光照的情况下,电池吸收光能,电池两端出现异号电荷的积累,即产生“光生电压”。太阳能电池透过光生伏特效应可以将太阳光能转化成直流电能,但一块光伏面板能够产生的电流不够一般住宅使用,所以将数块光伏面板连接在一起而形成了阵列。
2、光伏面板长期使用后表面会形成脏污,脏污可能会导致光伏面板产生热斑等缺陷,影响发电效率和光伏面板的使用寿命,因此需要定期对光伏面板进行表面清洁。
3、现有技术一般使用清洁机器人对光伏面板进行清洁,但在光伏阵列中,不同位置的光伏面板表面的脏污情况不同,而清洁机器人一般采用固定清洁模式对光伏阵列中的各个光伏面板进行清洁,导致光伏阵列的整体清洁效果不佳。
4、有鉴于此,如何提供一种能够针对光伏面板表面脏污情况进行清洁的清洁方法,是本领域人员亟需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种光伏面板清洁方法,以解决现有技术存在的问题,实现自动检测脏污度,确定脏污位置,提高光伏面板清洁效果。
2、为实现上述目的,本发明提供了如下方案:本发明提供一种光伏面板清洁方法,包括以下步骤:
3、s1:通过清洁机器人尾部的第一摄像头对光伏面板的脏污度进行检测;
4、s2:将光伏面板的脏污度与脏污阈值进行比对,当脏污度大于脏污阈值时确定脏污位置,清洁机器人对脏污位置进行清洁,当脏污度小于脏污阈值时,清洁机器人沿光伏面板移动;
5、s3:对光伏面板的脏污度进行复检。
6、进一步的,所述清洁机器人的头部具有清洁组件,所述第一摄像头朝向光伏面板,所述第一摄像头检测光伏面板脏污度的步骤包括:
7、s101:图像采集:使用第一摄像头拍摄光伏面板表面的图像;
8、s102:图像预处理:对采集到的图像进行增强、去噪、灰度化预处理;
9、s103:特征提取:从预处理后的图像中提取与脏污位置对应的图像亮度、对比度、颜色和纹理特征;
10、s104:脏污度检测算法:使用阈值检测算法分析提取的特征,根据阈值检测算法的输出,得到光伏面板表面的脏污度。
11、进一步的,当脏污度大于脏污阈值时确定脏污位置,清洁机器人后退,通过清洁组件对脏污位置再次清洁。
12、进一步的,所述清洁机器人在脏污位置往复前进、后退三次。
13、进一步的,所述清洁机器人包括第一清洁机器人和第二清洁机器人,所述清洁组件包括吸尘器、喷水组件和刮板,所述吸尘器设置于所述第一清洁机器人上,所述喷水组件和刮板设置于所述第二清洁机器人上,当第一摄像头检测到脏污度大于脏污阈值时,第二清洁机器人向脏污位置喷水并利用刮板进行清洁。
14、进一步的,还包括无人机,无人机上具有第二摄像头,通过第二摄像头对光伏面板的脏污度进行复检。
15、进一步的,在步骤s3中,当第二摄像头检测到光伏面板的脏污度大于脏污阈值时确定脏污位置,清洁机器人移动至脏污位置进行清洁。
16、进一步的,当脏污度复检确定的脏污位置有多个时,根据各个脏污位置计算获得最短移动路线,清洁机器人按最短移动路线依次移动至各个脏污位置进行清洁。
17、本发明公开了以下技术效果:
18、1.在清洁机器人上加装第一摄像头,通过第一摄像头对光伏面板的表面进行检测,获取光伏面板表面脏污度,与脏污阈值比对后即可在清洁过程中实时判定光伏面板是否清洁干净,同时还能获得脏污位置,与清洁机器人配合可对整个光伏阵列进行脏污检测和清洁,提高清洁效果。
19、2.清洁机器人上设置有吸尘器、喷水组件和刮板,当检测到光伏面板表面的脏污位置时,可通过喷水、刮扫的方式进一步提高清洁效果。
20、3.清洁机器人清洁完毕后,可通过无人机结合第二摄像头对光伏阵列的清洁效果进行复检,由于无人机具有更大的视野范围,因此能够一次性检测光伏阵列所有光伏面板的清洁情况并快速找出脏污位置,清洁机器人对复检找到的各个脏污位置再次清洁,保证整个光伏阵列的清洁效果。
21、4.复检后根据各个脏污位置规划清洁机器人的移动路线,能够快速精确的以最短的路程移动至各个脏污位置,提高清洁效率,降低能耗。
技术特征:1.一种光伏面板清洁方法,其特征在于,包括以下步骤:
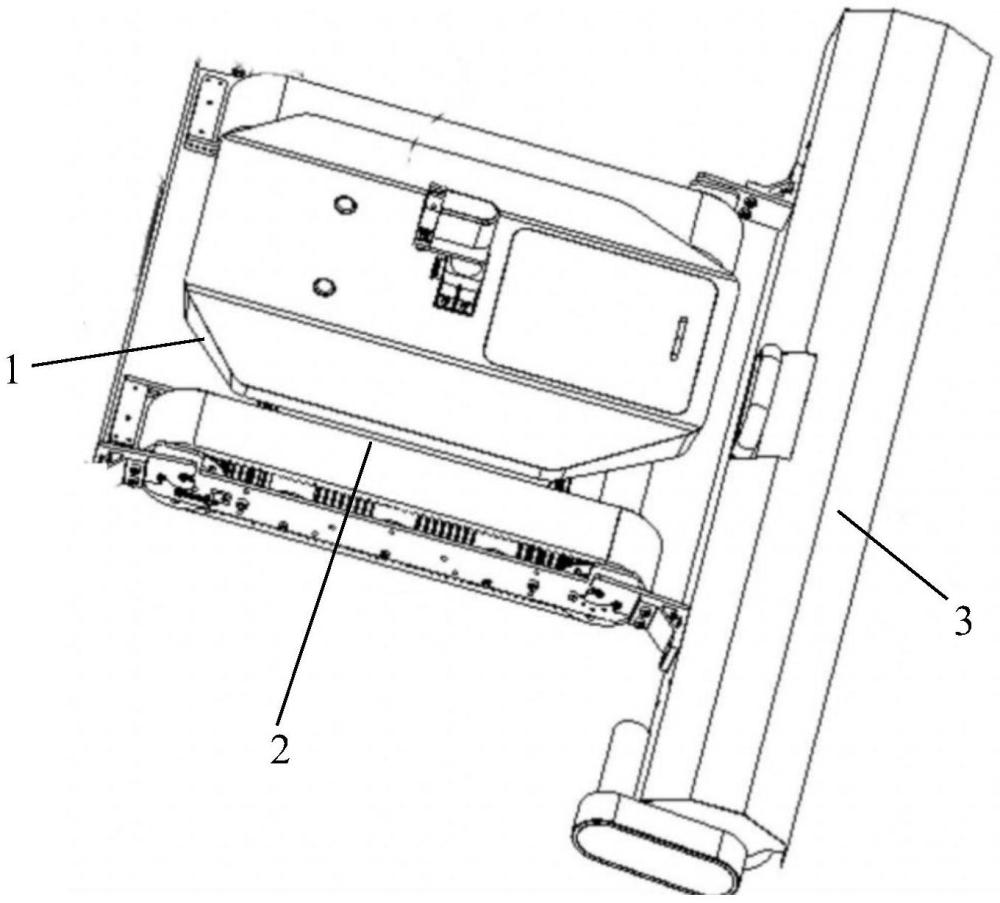
2.根据权利要求1所述的一种光伏面板清洁方法,其特征在于,所述清洁机器人(2)的头部具有清洁组件(3),所述第一摄像头(1)朝向光伏面板,所述第一摄像头(1)检测光伏面板脏污度的步骤包括:
3.根据权利要求2所述的一种光伏面板清洁方法,其特征在于,当脏污度大于脏污阈值时确定脏污位置,清洁机器人(2)后退,通过清洁组件(3)对脏污位置再次清洁。
4.根据权利要求3所述的一种光伏面板清洁方法,其特征在于,所述清洁机器人(2)在脏污位置往复前进、后退三次。
5.根据权利要求3所述的一种光伏面板清洁方法,其特征在于,所述清洁机器人(2)包括第一清洁机器人(2)和第二清洁机器人(2),所述清洁组件(3)包括吸尘器、喷水组件和刮板,所述吸尘器设置于所述第一清洁机器人(2)上,所述喷水组件和刮板设置于所述第二清洁机器人(2)上,当第一摄像头(1)检测到脏污度大于脏污阈值时,第二清洁机器人(2)向脏污位置喷水并利用刮板进行清洁。
6.根据权利要求1所述的一种光伏面板清洁方法,其特征在于,还包括无人机,无人机上具有第二摄像头,通过第二摄像头对光伏面板的脏污度进行复检。
7.根据权利要求6所述的一种光伏面板清洁方法,其特征在于,在步骤s3中,当第二摄像头检测到光伏面板的脏污度大于脏污阈值时确定脏污位置,清洁机器人(2)移动至脏污位置进行清洁。
8.根据权利要求7所述的一种光伏面板清洁方法,其特征在于,当脏污度复检确定的脏污位置有多个时,根据各个脏污位置计算获得最短移动路线,清洁机器人(2)按最短移动路线依次移动至各个脏污位置进行清洁。
技术总结本发明公开一种光伏面板清洁方法,涉及光伏设备清洁技术领域,包括以下步骤:S1:通过清洁机器人尾部的第一摄像头对光伏面板的脏污度进行检测;S2:将光伏面板的脏污度与脏污阈值进行比对,当脏污度大于脏污阈值时确定脏污位置,清洁机器人对脏污位置进行清洁,当脏污度小于脏污阈值时,清洁机器人沿光伏面板移动;S3:对光伏面板的脏污度进行复检。通过对光伏面板的表面进行检测,获取光伏面板表面脏污度,与脏污阈值比对后即可在清洁过程中实时判定光伏面板是否清洁干净,同时还能获得脏污位置,与清洁机器人配合可对整个光伏阵列进行脏污检测和清洁,提高清洁效果。技术研发人员:周锦凤,王雷雨,陈志军,谭爽,张培雯,黄晨茹,王芬受保护的技术使用者:一道新能源科技股份有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/292590.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表