一种粮仓粮食体积计算方法、电子设备及存储介质与流程
- 国知局
- 2024-09-14 14:30:52
本发明属于雷达测量粮仓设备,尤其是涉及一种粮仓粮食体积计算方法、电子设备及存储介质。
背景技术:
1、现粮仓物料的盘点模式主要依赖于人工测量体积,其存在难度大、人员上仓困难、安全风险大及盘点的准确性和安全性难以把控问题。
2、虽然现有技术中也出现了非接触式自动化粮仓库存检测方法,主要是通过雷达对仓内形状进行扫描,得到仓内物料三维分布模型,结合密度得到物料数量,由此计算物料体积。
3、但是,现有算法主要通过扫描粮堆顶面的高度数据,然后对其进行网格化划分,对每一个网格,结合仓体底面构造四棱柱,计算出每一个棱柱的体积,对所有棱柱求和得到总体积;
4、由于设备安装的时候存在随机角度偏差,导致扫描得到点云数据坐标z轴与筒仓竖直方向不一致,料面点云z坐标不等于高度值,直接进行网格划分,求得棱柱体积存在偏差;
5、另外,专利公开号cn106097318a公开了一种粮食体积测量系统和方法,它主要用立体视觉匹配技术,通过两个相机从不同角度拍摄粮食堆,以此重建三维模型,该技术依赖于视觉信息的准确性和环境光线条件。但是该专利主要通过图像处理和立体匹配算法来估算粮食体积,该方法受限于图像质量和相机参数的校准。
6、综上所述,如何设计一种粮仓粮食体积计算方法,既能够通过雷达测量粮食的体积,通过自动化处理流程大大减少人员的工作量,又能够提高对粮食库存检测的准确性和效率,成为现有技术领域的一个攻关课题。
技术实现思路
1、为了克服现有技术的上述缺点,本发明提供了一种粮仓粮食体积计算方法,解决了上述问题。
2、为达到上述目的,本发明公开了一种粮仓粮食体积计算方法,包括:
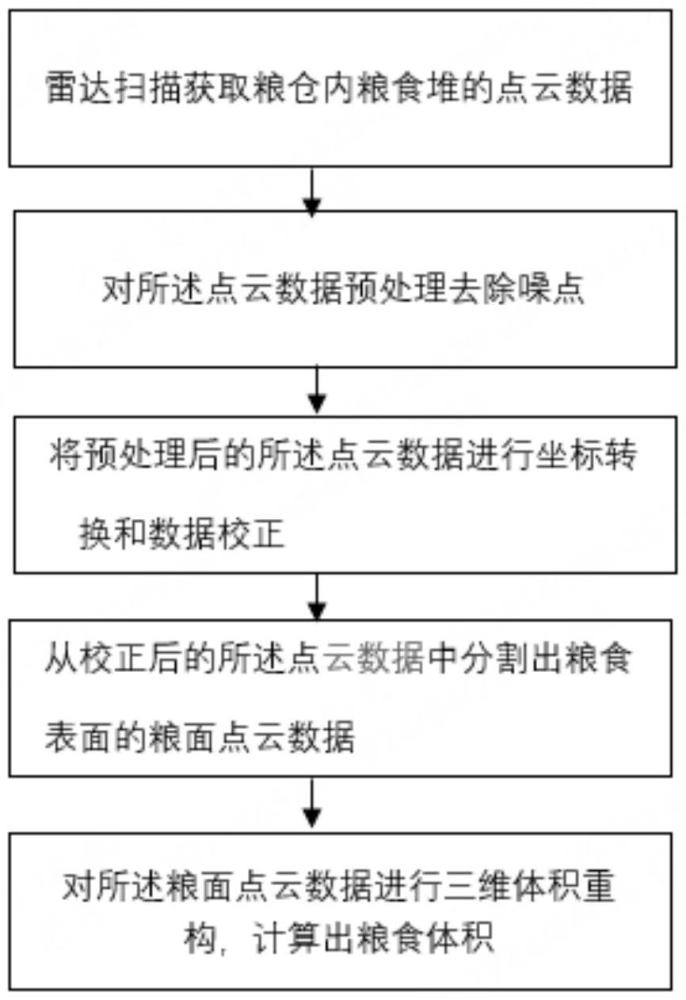
3、获取粮仓内粮食堆的点云数据,所述点云数据为雷达扫描粮仓内粮食堆获得的数据,并根据所述点云数据构建粮食三维模型;
4、对所述点云数据预处理,去除噪点,以降低数据量;
5、将预处理后的所述点云数据进行坐标转换和数据校正,以确保数据在准确的坐标系统中表示;
6、从校正后的所述点云数据中分割出粮食表面的粮面点云数据;
7、根据所述粮面点云数据,进行三维体积重构,计算出粮食体积,结合粮食已知密度,计算出粮食体积。
8、本申请与现有技术相比有以下效果:本申请通过点云数据构建三维模型,并对点云数据预处理,以去除噪点来降低数据量,这样可以大大提高运算效率,节省计算时间;同时,通过坐标转换和数据校正,确保数据在准确的坐标系统中表示,从而提高了数据的检测的准确性,通过粮面点云数据分割可以得出粮食点云数据,然后对粮面点云数据进行三维体积重构,得出粮食的体积,根据现有粮食的密度,就可以计算出粮食的体积。本申请涵盖的关键技术点和算法处理不仅提高了粮食库存监测的准确性和效率,而且通过自动化处理流程大大减少了人力资源的依赖,对现代粮仓管理具有重要的实用价值。同时,本申请通过激光雷达(lidar)直接获取粮仓内的三维点云数据,雷达扫描不受光线条件限制,能在多种环境下稳定工作,因此提供更高精度和可靠性的数据。
9、进一步的,所述雷达为安装在粮仓顶部中心位置的激光雷达设备,所述激光雷达设备用于对粮仓内部全面覆盖扫描,进而实时收集粮食堆叠的所述点云数据。
10、进一步的,所述点云数据的预处理包括:
11、根据应用统计滤波(statistical outlier removal,sor)技术,基于每个所述点云数据周围邻域点的距离分布统计特性来去除噪点;
12、并通过体素网格滤波(voxel grid filtering)技术降低所述点云数据的数据量,减少后续处理的计算负担,同时保持数据的结构特征不变。
13、进一步的,所述坐标转换是通过坐标转换算法将雷达扫描获得的极坐标点云数据转换为直角坐标系下的点云数据。
14、进一步的,所述数据校正是结合随机抽样一致性算法(ransac),对粮仓侧壁的点云进行圆柱模型拟合,准确计算出粮仓的中心轴线和半径,实现仓壁的几何参数精准校正。
15、进一步的,所述粮面点云数据包括利用法向量夹角及聚类算法分割出料面,以从校正后的所述点云数据中精确分割出粮食表面的点云。
16、进一步的,还包括用于对所述粮面点云数据进行孔洞修补和平滑处理的点云修补平滑技术。
17、进一步的,所述点云修补平滑技术包括用于重构连续光滑的粮食表面模型的三维曲面重构技术和三维插值算法,通过所述三维曲面重构技术和所述三维插值算法,对所述粮面点云数据进行孔洞修复和均匀化处理,以保证粮面模型的完整性和准确性。
18、进一步的,根据孔洞修复和均匀化处理后的所述粮面点云数据,应用delaunay三角剖分和体积渲染技术进行三维体积重构,从而计算出粮食体积。
19、进一步的,根据所述粮食体积,结合粮食类型及其物理性质,选取合适的密度参数进行质量转换,进而计算出粮仓内的粮食体积。
20、在第二个方面,本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述粮仓粮食体积计算方法的步骤。
21、在第三个方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上所述粮仓粮食体积计算方法的步骤。
技术特征:1.一种粮仓粮食体积计算方法,其特征在于,包括:
2.根据权利要求1所述的一种粮仓粮食体积计算方法,其特征在于,所述雷达为安装在粮仓顶部中心位置的激光雷达设备,所述激光雷达设备用于对粮仓内部全面覆盖扫描,进而实时收集粮食堆叠的所述点云数据。
3.根据权利要求1所述的一种粮仓粮食体积计算方法,其特征在于,所述点云数据的预处理包括:
4.根据权利要求1-3中任一项所述的一种粮仓粮食体积计算方法,其特征在于,所述坐标转换是通过坐标转换算法将雷达扫描获得的极坐标点云数据转换为直角坐标系下的点云数据。
5.根据权利要求4所述的一种粮仓粮食体积计算方法,其特征在于,所述数据校正是结合随机抽样一致性算法(ransac),对粮仓侧壁的点云进行圆柱模型拟合,准确计算出粮仓的中心轴线和半径,实现仓壁的几何参数精准校正。
6.根据权利要求5所述的一种粮仓粮食体积计算方法,其特征在于,所述粮面点云数据包括利用法向量夹角及聚类算法分割出料面,以从校正后的所述点云数据中精确分割出粮食表面的点云。
7.根据权利要求6所述的一种粮仓粮食体积计算方法,其特征在于,还包括用于对所述粮面点云数据进行孔洞修补和平滑处理的用于重构连续光滑的粮食表面模型的三维曲面重构技术和三维插值算法,通过所述三维曲面重构技术和所述三维插值算法,对所述粮面点云数据进行孔洞修复和均匀化处理,以保证粮面模型的完整性和准确性。
8.根据权利要求7所述的一种粮仓粮食体积计算方法,其特征在于,根据孔洞修复和均匀化处理后的所述粮面点云数据,应用delaunay三角剖分和体积渲染技术进行三维体积重构,从而计算出粮食体积。
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述粮仓粮食体积计算方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1至8任一项所述粮仓粮食体积计算方法的步骤。
技术总结本发明属于雷达测量粮仓设备技术领域,具体公开了一种粮仓粮食体积计算方法、电子设备及存储介质,所述方法包括:获取粮仓内粮食堆的点云数据,点云数据为雷达扫描粮仓内粮食堆获得的数据,并根据点云数据构建粮食三维模型;对点云数据预处理,去除噪点,以降低数据量;将预处理后的点云数据进行坐标转换和数据校正,以确保数据在准确的坐标系统中表示;从校正后的点云数据中分割出粮食表面的粮面点云数据;根据粮面点云数据,进行三维体积重构,计算出粮食体积,结合粮食已知密度,计算出粮食体积。本发明涵盖的关键技术点和算法处理提高了粮食库存监测的准确性和效率。技术研发人员:杨俊鹏,石志文,宋任波,木东良,朱光明,封杨受保护的技术使用者:牧原食品股份有限公司技术研发日:技术公布日:2024/9/12本文地址:https://www.jishuxx.com/zhuanli/20240914/294495.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表