一种基于副载波调制的三维激光相干测距测速装置与方法
- 国知局
- 2024-09-14 14:36:12
本发明涉及激光雷达三维测距,特别是一种基于副载波调制的相干三维测距装置与测距方法。
背景技术:
1、激光雷达在自动驾驶等领域有着实际的应用需求,其作用是对周围环境进行实时地三维感知,以实现路径规划或避开障碍物等功能。激光雷达技术是一种基于激光的精确测距成像技术,被认为是车辆自动驾驶、人工智能机器人和无人机侦察的关键传感器技术之一。目前,激光雷达技术在进行三维成像时,主要采用二维点扫描式(参见zhang x,kwonk,henriksson j,et al.a large-scale microelectromechanical-systems-basedsilicon photonics lidar[j].nature,2022,603(7900):253-258.)或一维线扫描式(参见riemensberger j,lukashchuk a,karpov m,et al.massively parallel coherent laserranging using a soliton microcomb[j].nature,2020,581(7807):164-170.或lukashchuk a,riemensberger j,karpov m,et al.dual chirped microcomb basedparallel ranging at megapixel-line rates[j].nature communications,2022,13(1):3280.)。对于二维点扫描式方法,扫描点数的过多会导致成像速度的下降。而现有的一维线扫描式方法虽然可以减少扫描次数,提高成像速度,但是该方法需要多路并行探测,需要几十个光电探测器和模数转换器(参见riemensberger j,lukashchuk a,karpov m,etal.massively parallel coherent laser ranging using a soliton microcomb[j].nature,2020,581(7807):164-170.)或高带宽的单个探测支路(参见lukashchuk a,riemensberger j,karpov m,et al.dual chirped microcomb based parallel rangingat megapixel-line rates[j].nature communications,2022,13(1):3280.)),导致系统的成本增加。因此,设计一种高性能低成本的相干激光雷达具有重要意义,有望推动相干激光雷达走向实际应用。
技术实现思路
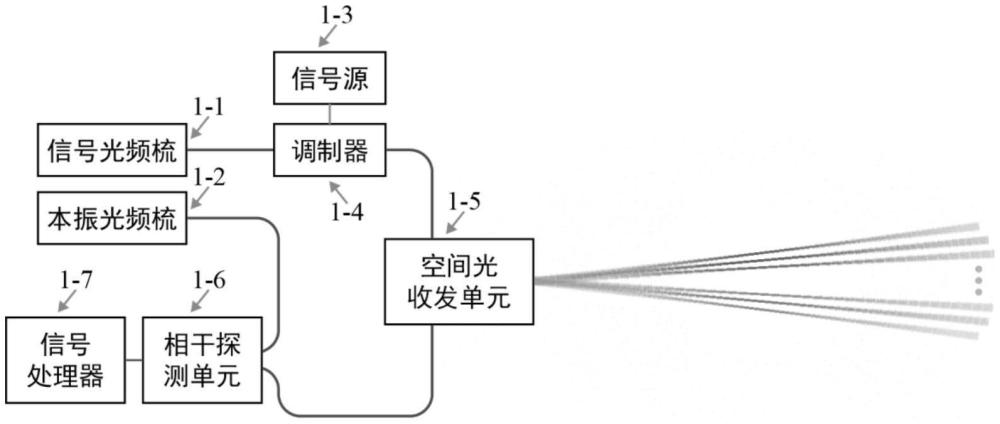
1、本发明的目的在于针对现有技术的不足,提供一种基于副载波调制的三维激光相干测距测速装置与方法,该装置由信号光频梳、本振光频梳、信号源、调制器、空间光收发单元、相干探测单元和信号处理器组成。该装置中信号光频梳与本振光频梳具有不同的重复频率。该装置中信号源输出副载波调制信号,该副载波信号具体可以为单频副载波信号、多频副载波信号以及相位跳变副载波信号。使用该装置进行测距测速时,将信号源输出的副载波调制信号通过调制器加载至信号光频梳上,使用空间光收发单元将调制后的信号光频梳不同光载波发射至空间中不同方向进行多通道并行化探测。使用本振光频梳对信号光频梳在空间中的回波信号进行相干检测。在信号处理中,使用频域解调法获得同时获得各探测通道所探测到的距离和速度。在信号光频梳和本振光频梳的重复频率差较大使得不同通道的拍频信号在频域完全分离时,也可以采用时域互相关解调法计算各探测通道所探测到的距离。
2、本发明的技术解决方案如下:
3、一种基于副载波调制的三维激光相干测距测速装置,其特征在于,包括信号光频梳、本振光频梳、信号源、调制器、空间光收发单元、相干探测单元和信号处理器。
4、所述的信号光频梳光输出端与所述的调制器光输入端相连,所述的调制器光输出端与所述的空间光收发单元相连,所述的调制器射频输入端与所述的信号源相连,所述的空间光收发单元还与所述的相干探测单元的一个光输入端相连,所述的本振光频梳与所述的相干探测单元的另一个光输入端相连,所述的相干探测单元的输出端与所述的信号处理器相连。
5、所述的信号源的输出信号可以为单频副载波信号、多频副载波信号、也可以为相位跳变副载波信号。所述的多频副载波信号可以通过叠加多个不同频率的单频副载波信号获得。
6、所述的信号光频梳和所述的本振光频梳具有不同的重复频率,进而实现使用单个探测单元对所述的信号光频梳中不同通道信号进行同时探测。
7、所述的信号光频梳的不同光载波被所述的空间光收发单元同时发射到空间中不同方向,进行多通道并行测距测速。
8、利用上述的基于副载波调制的三维激光相干测距测速装置的测距测速方法,其特征在于,该方法包括下列步骤:
9、1)所述的信号光频梳发出的探测光频梳信号在频域上表现为一系列等间隔的光载波结构,相邻的两光载波的频率间隔为fr。所述的探测光频梳信号经过所述的调制器时,被所述的信号源产生的所述的单频副载波信号、所述的多频副载波信号或所述的相位跳变副载波信号调制,被调制的所述的探测光频梳信号经过所述的空间光收发单元进行发射,所述的探测光频梳信号中频率不同的光载波被所述的空间光收发单元以不同的角度发射,作为不同的探测通道照到待成像区域,该待成像区域反射的探测光频梳信号被所述的空间光收发单元接收,然后注入至所述的相干探测单元中。
10、2)所述的本振光频梳发出的本振光频梳信号在频域上也表现为一系列等间隔的光载波结构,但相邻的两光载波的频率间隔为fr+δfr,其中δfr为所述的本振光频梳信号与所述的探测光频梳信号之间的重复频率差。所述的本振光频梳信号与所述的探测光频梳信号一同输入至所述的相干探测单元中进行相干探测,产生拍频信号并输入至所述的信号处理器进行采集和处理,解调不同探测通道探测得到的距离和速度。
11、3)在参数设置中,可以将δfr设置为大于每个探测通道带宽的数值,使得不同探测通道的拍频信号在频域相互分离,产生多通道频率分离拍频信号;也可以将δfr设置为小于每个探测通道带宽的数值,使得不同探测通道的拍频信号在频域相互交织,产生多通道频率交织拍频信号。
12、4)当使用所述的单频副载波信号作为调制信号,并将δfr设置为大于每个探测通道带宽的数值,产生所述的多通道频率分离拍频信号时,第一种信号处理方法为采用时域互相关解调算法解调每个探测通道测量的速度和距离。在所述的时域互相关解调算法中,使用信号分路器将所述的拍频信号分为多路,并首先使用傅里叶变换器获得拍频信号频谱,然后使用鉴频器确定各探测通道拍频信号的基带频率。此时,每个探测通道测量得到的目标物体的速度计算公式为:
13、
14、其中,vi为第i个探测通道测量得到的速度,c为光速,fi,0为拍频信号基带频率的实际数值,为在目标物体未运动时拍频信号基带频率的期望数值,fopt,i为第i个探测通道光载波的频率。
15、在距离解调中,对每个通道进行单独的信号处理。每个信号处理支路主要包括相干解调器、互相关器以及峰值提取器。在每个信号处理支路,将所述的拍频信号和所述的鉴频器输出的对应的基带频率首先输入至所述的相干解调器中,解调出探测信号中的单频副载波信号。然后将所述的探测信号中的单频副载波信号和参考单频副载波信号输入至所述的互相关器中计算二者的互相关函数,然后使用所述的峰值提取器确定所述的互相关函数的峰值时刻,即可得到所述的探测信号中的单频副载波信号相对于所述的参考单频副载波信号的延时。此时,每个探测通道测量得到的目标物体的距离计算公式为
16、li=cδti/2, (2)
17、其中,li为第i个探测通道测量得到的距离,δti为第i个探测通道中所述的探测信号中的单频副载波信号相对于所述的参考单频副载波信号的延时。
18、5)当使用所述的单频副载波信号作为调制信号,并将δfr设置为大于每个探测通道带宽的数值,产生所述的多通道频率分离拍频信号时,第二种信号处理方法为采用频域相位延迟解调算法解调每个探测通道测量的速度和距离。在所述的频域相位延迟解调算法中,使用傅里叶变换器获得拍频信号频谱,使用信号分路器将所述的拍频信号频谱分为多路,然后使用鉴频器确定各探测通道拍频信号的基带频率。此时,每个探测通道测量得到的目标物体的速度计算公式为:
19、
20、其中,vi为第i个探测通道测量得到的速度,c为光速,fi,0为拍频信号基带频率的实际数值,为在目标物体未运动时拍频信号基带频率的期望数值,fopt,i为第i个探测通道光载波的频率。
21、在距离解调中,对每个通道进行单独的信号处理。每个信号处理支路主要包括相位提取器。在每个信号处理支路,将所述的拍频信号频谱和所述的鉴频器输出的正1阶和负1阶边带频率输入至所述的相位提取器中,确定所述的正1阶和负1阶边带频率的相位。此时,每个探测通道测量得到的目标物体的距离计算公式为
22、
23、其中,li为第i个探测通道测量得到的距离,为正1阶边带频率的相位,为负1阶边带频率的相位,fsub为所述的单频副载波信号的频率。
24、6)当使用所述的单频副载波信号作为调制信号,并将δfr设置为小于每个探测通道带宽的数值,产生所述的多通道频率交织拍频信号时,采用所述的频域相位延迟解调算法解调每个探测通道测量的速度和距离,避免不同探测通道间的串扰。
25、7)当使用所述的多频副载波信号作为调制信号时,可以采用与所述的单频副载波信号相同的信号处理方法,获得所述的多频副载波信号中不同频率的单频副载波信号距离和速度测量结果,然后根据该结果进一步地解调出每个探测通道所探测得到的正确的距离和速度。
26、8)当使用所述的相位跳变副载波信号作为调制信号,并将δfr设置为大于每个探测通道带宽的数值,产生所述的多通道频率分离拍频信号时,第一种信号处理方法为采用时域互相关解调算法解调每个探测通道测量的速度和距离。在所述的时域互相关解调算法中,使用信号分路器将所述的拍频信号分为多路,并首先使用傅里叶变换器获得拍频信号频谱,然后使用鉴频器确定各探测通道拍频信号的基带频率。此时,每个探测通道测量得到的目标物体的速度计算公式为:
27、
28、其中,vi为第i个探测通道测量得到的速度,c为光速,fi,0为拍频信号基带频率的实际数值,为在目标物体未运动时拍频信号基带频率的期望数值,fopt,i为第i个探测通道光载波的频率。
29、在距离解调中,对每个通道进行单独的信号处理。每个信号处理支路主要包括相干解调器、互相关器以及峰值提取器。在每个信号处理支路,将所述的拍频信号和所述的鉴频器输出的对应的基带频率首先输入至所述的相干解调器中,解调出探测信号中的相位跳变副载波信号。然后将所述的探测信号中的相位跳变副载波信号和参考相位跳变副载波信号输入至所述的互相关器中计算二者的互相关函数,然后使用所述的峰值提取器确定所述的互相关函数的峰值时刻,即可得到所述的探测信号中的相位跳变副载波信号相对于所述的参考相位跳变副载波信号的延时。此时,每个探测通道测量得到的目标物体的距离计算公式为
30、li=cδti/2, (6)
31、其中,li为第i个探测通道测量得到的距离,δti为第i个探测通道中所述的探测信号中的相位跳变副载波信号相对于所述的参考相位跳变副载波信号的延时。
32、9)当使用所述的相位跳变副载波信号作为调制信号,并将δfr设置为大于每个探测通道带宽的数值,产生所述的多通道频率分离拍频信号时,第二种信号处理方法为采用频域幅度相位联合延迟解调算法解调每个探测通道测量的速度和距离。在所述的频域幅度相位联合延迟解调算法算法中,使用傅里叶变换器获得拍频信号频谱,使用信号分路器将所述的拍频信号频谱分为多路,然后使用鉴频器确定各探测通道拍频信号的基带频率。此时,每个探测通道测量得到的目标物体的速度计算公式为:
33、
34、其中,vi为第i个探测通道测量得到的速度,c为光速,fi,0为拍频信号基带频率的实际数值,为在目标物体未运动时拍频信号基带频率的期望数值,fopt,i为第i个探测通道光载波的频率。
35、在距离解调中,对每个通道进行单独的信号处理。每个信号处理支路主要包括幅度相位提取器和延时解调器。在每个信号处理支路,将所述的拍频信号频谱和所述的鉴频器输出的正1阶和负1阶边带频率输入至所述的幅度相位提取器中,解调出所述的探测信号中的相位跳变副载波信号相对于所述的参考相位跳变副载波信号的整周期延时和分数周期延时,进而获得总的延时。此时,每个探测通道测量得到的目标物体的距离计算公式为
36、li=cδti/2, (8)
37、其中,li为第i个探测通道测量得到的距离,δti为第i个探测通道中所述的探测信号中的相位跳变副载波信号相对于所述的参考相位跳变副载波信号的延时。
38、10)当使用所述的相位跳变副载波信号作为调制信号,并将δfr设置为小于每个探测通道带宽的数值,产生所述的多通道频率交织拍频信号时,可采用频域幅度相位联合延迟解调算法算法解调每个探测通道测量的速度和距离,避免不同探测通道间的串扰。
39、11)改变所述的空间光收发单元中发射光束的角度,即可完成三维测距与测速。
40、在上述的基于副载波调制的三维激光相干测距测速装置与方法中,所述的信号光频梳和所述的本振光频梳输出的光信号也可以仅包含单个光载波。此时,所述的空间光收发单元每次仅发射单个探测光束。
41、与现有技术相比,本发明的有益效果:
42、(1)调制信号为窄带信号,容易产生;并且通过外调制方式加载到光载波上,避免了对光源直接调谐带来的相干性恶化等问题。
43、(2)进行多通道探测时,可以使得不同探测通道的拍频信号频率交织,降低探测带宽,进而降低系统成本。
本文地址:https://www.jishuxx.com/zhuanli/20240914/295015.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表