一种构建更真实噪声分布的方法与流程
- 国知局
- 2024-09-14 14:47:56
本发明属于raw域2d图像去噪,特别涉及一种构建更真实噪声分布的方法。
背景技术:
1、近年来,随着科技的飞速发展,图像处理技术愈发成熟。现有技术中,由于大量摄像设备在光照不足或遮挡等条件下,抓拍到的图像往往包含着不同程度的噪声,特别在晚上,抓拍到的图像噪声特别大,以导致图像的质量较差,无法被拍摄者使用。目前大量的去噪研究基于rgb图像域,这样因感光元器件所得的图像经isp处理后,噪声成未知分布。因此,一些噪声建模方法导致图像去噪效果较差。为了生成更接近真实噪声并去噪,目前一些去噪研究在raw域进行。
2、目前,大多数噪声建模方式直接将图像的噪声建模为单一的加性高斯分布噪声,然后直接叠加在图像上。随着研究者对感光元器件的深入研究,将噪声分解为泊松分布和高斯分布,然后分别估计两种分布的参数,最后在建模时,将噪声建模为异方差分布的高斯分布。
3、现有技术存在的缺陷在于:
4、由于噪声是由光子打到感光元器件过程中,光子的随机性、元器件发热以及量化等因素产生的。经研究发现,这些噪声在raw域主要服从泊松分布和高斯分布。而在rgb域图像的噪声是未知的,无法很好的进行噪声建模并通过网络去除,因此在raw域去噪是非常值得研究的,但因目前成对的去噪数据集很难获取,传统方法需要严格控制采集环境,如光照,相机角度等,若镜头前出现物体移动,那么在合成干净图像时会因不对齐问题而产生去噪细节丢失问题。因此,通过相关的算法构建合成噪声数据集是非常必要的。
5、现有技术常用的技术术语:
6、iso:感光度是衡量底片对于光的灵敏程度,一般通过改变摄像机的模拟增益进行调节。
7、raw图:图像的一种排布方式,包含从数码相机、扫描器或电影胶片扫描仪的图像传感器所处理数据。
8、isp:图像信号处理,对原始得到的raw图进行一系列处理。
9、遮蔽shading:表示在使用摄像头拍摄时,图像呈现出中心区域较亮,四周偏暗的现象。
10、lux:一种对光照强度的度量单位。
技术实现思路
1、对于在raw域去噪,成对的图像干净-噪声图像很难获取,导致数据驱动的深度学习方法在去噪任务中表现效果较差,无法满足特定的任务需要,为了解决上述问题,本技术的目的在于:提出的方法解决了噪声数据构建的问题,通过该方法可以得到大量的噪声数据,不需要花费大量的人力进行数据采集及标注。
2、具体地,本发明提供一种构建更真实噪声分布的方法,所述方法通过拍白纸的方式,对需要估计的摄像头进行噪声建模,在估计过程中,将摄像头置于灯箱中,打开d65光源,保证光打在贴白纸的墙上以满足保证光线均匀的条件,另外拍摄高感光度iso时,保证照度300lux;在估计得到噪声参数后,为了防止估计偏差,将参数控制在[-0.001,0.001]范围内随机生成一个数并与该参数相加。
3、所述方法进一步包括以下步骤:
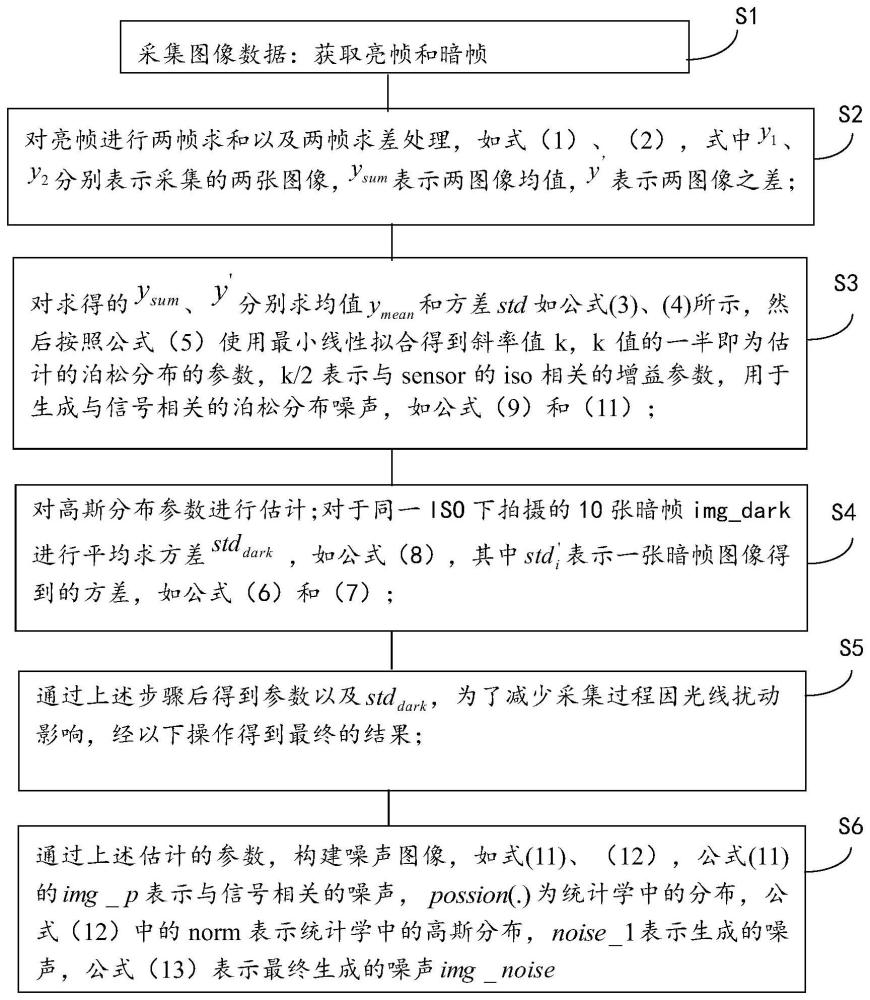
4、s1:采集图像数据:获取亮帧和暗帧;
5、s2:对亮帧进行两帧求和以及两帧求差处理,如式(1)、(2),式中y1、y2分别表示采集的两张图像,ysum表示两图像均值,y'表示两图像之差;
6、ysum=(y1+y2)/2 (1)
7、y'=y1-y2 (2)
8、s3:对求得的ysum、y'分别求均值ymean和方差std如公式(3)、(4)所示,然后按照公式(5)使用最小线性拟合得到斜率值k,k值的一半即为估计的泊松分布的参数,k/2表示与sensor的iso相关的增益参数,用于生成与信号相关的泊松分布噪声,如公式(9)和(11);
9、
10、
11、std=k/2*ymean+b (5)
12、s4:对高斯分布参数进行估计;对于同一iso下拍摄的10张暗帧img_dark进行平均求方差stddark,如公式(8),其中stdi'表示一张暗帧图像得到的方差,如公式(6)和(7):
13、
14、
15、
16、s5:通过上述步骤后得到参数k以及stddark,为了减少采集过程因光线扰动影响,经以下操作即公式(9)、(10)得到最终的结果;
17、k'=random(0.8*k,k) (9)
18、std'dark=random(0.8*stddark,stddark) (10)
19、s6:通过上述估计的参数,构建噪声图像,如式(11)、(12),公式(11)的img_p表示与信号相关的噪声,possion(.)为统计学中的分布,公式(12)中的norm表示统计学中的高斯分布,noise_1表示生成的噪声,公式(13)表示最终生成的噪声img_noise:
20、img_p=possion(img/k'/2)*k'/2 (11)
21、noise_1=norm(loc=0,std=std'dark) (12)
22、img_noise=img_p+noise_1 (13)。
23、所述步骤s1进一步包括:
24、s1.1:准备需要的工具:标定的摄像头、灯箱或者可调节亮度的摄影棚、无皱的白纸;首先将摄像头放置于d65灯源灯箱中,另外将白纸放置在平坦的背景墙上;
25、s1.2:为了防止拍摄时,因摄像头遮蔽shading的影响,移动摄像头使得白纸在处于镜头中1/2位置;
26、s1.3:判断是否拍摄亮帧?如果是,则打开采集设备采集亮帧,设置相机的感光度iso为2n,n=0,1,2,......,然后,最暗亮度开始,改变曝光时间,从[1,1123]以间隔5进行选择,1123是sensor内置的与时间相关的参数;在每个曝光时间下,连续采集两张图像并保存;这里保证照度300lux;s1.4:判断是否图像出现曝光?如果否,则返回步骤s1.3,每次改变iso即每隔改变曝光时间为10进行采集,需要出现曝光,依次采集不同曝光时间下的图像,在改变iso后,再次进行步骤s2采集相应的图像求和做差处理,继续步骤s3,每改变一次iso,就能够得到(k,std),因为拟合一条直线,如公式(5)所示,需要很多的(k,std);如果是,则进行s1.6;s1.5:如果否,则关闭灯箱光源采集暗帧,采集暗帧的目的是估计与光照无关的参数,通过暗帧估计得到与暗电流以及和sensor材质导致的噪声相关参数,包括stddark参数,在公式(12)中使用,使用黑胶带将摄像头感光部位遮住且将摄像头置于黑暗的房间中;在拍摄时,以最短的曝光时间,设置曝光时间为1,其中1为sensor内部给出的调试曝光时间的参数值连续拍摄10帧或以上;
27、s1.6:采集结束。
28、由此,本技术的优势在于:本技术方法简单,通过上述方法对噪声参数进行估计,并且将估计的参数限制在一定范围内以避免因光线影响导致估计的参数不准问题。这种噪声合成方式可以任意生成所需要的噪声数据,减少了对真实数据的依赖,不需要严格的控制采集图像时的环境因素。
本文地址:https://www.jishuxx.com/zhuanli/20240914/295963.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表