用于测量物体的表面上的振动的系统和非接触式方法与流程
- 国知局
- 2024-09-19 14:25:42
本发明涉及一种用于测量物体的表面上的频率范围例如为0~50千赫的振动或振荡的非接触式且微侵入性的方法。
背景技术:
1、测量被测物体或结构的表面上的表面振荡的传统方法依赖于将压电传感器物理地附接至物体的表面。这些传感器在物体的表面上的物理附接产生了许多不期望的效果和附属物,这影响了表面的物理和声学性能,并且会导致对表面振荡的观测不准确且不可靠。因此,需要开发一种用于测量物体的表面上的振动或振荡的非接触式技术。
2、本部分提供与本发明相关的背景信息,其不一定是现有技术。
技术实现思路
1、本部分提供本发明的总体概述,并且不是其全部范围或全部特征的全面披露。
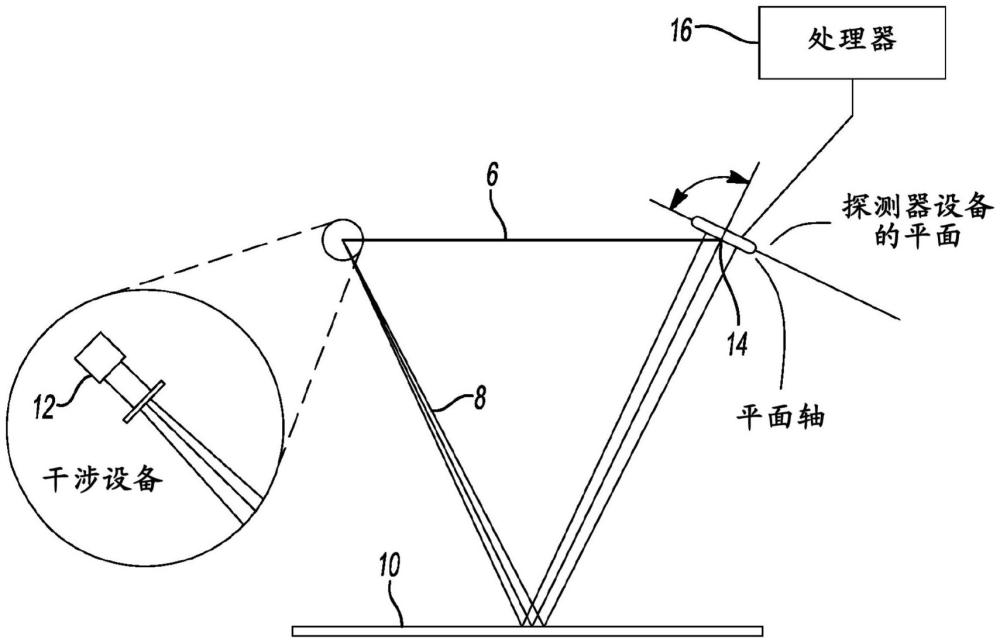
2、在一个方面中,提出了一种用于测量物体的表面上的振动的非接触式方法。该方法包括:通过光源沿着投射轴朝向物体的表面上的关注点投射光;通过探测器探测被表面上的关注点反射的光;通过处理器确定被探测器探测到的反射的光随时间的位置变化,其中处理器与探测器接合;以及通过处理器使用三角测量根据位置变化来计算表面的垂直位移的至少三个测量值。
3、在一个实施方式中,根据dz=dz1/(2*sin(θ))来计算垂直位移,其中dz1是反射的光在探测器上的位置变化并且θ是投射轴与基面之间的角度,其中光源与探测器之间的连线位于基面中并且基面平行于物体的表面。
4、探测器以大于40000的每秒帧率、例如160000的每秒帧率探测被表面上的关注点反射的光。
5、在另一个方面中,提出了一种用于沿着三个自由度测量物体的表面上的振动的非接触式方法。该方法包括:通过三个光源朝向物体的表面上的关注点投射光,其中从三个光源投射的光是相干的;使用三个探测器探测被表面上的关注点反射的光,其中三个探测器中的每个探测器捕捉来自三个光源中的对应的一个光源的光。根据被三个探测器捕捉到的光,处理器计算与关注点有关的三个位移值,其中处理器与三个探测器中的每一个接合。具体地,处理器使用三角测量计算关注点处的表面的垂直位移,使用三角测量计算关注点处的表面围绕x轴的旋转位移,并且使用三角测量计算关注点处的表面围绕y轴的旋转位移,其中x轴和y轴限定与物体的表面平行的平面。
6、在一个示例实施方式中,三个光源和三个探测器设置在基面中,其中基面平行于物体的表面。另外,三个光源和三个探测器相对于物体的表面被定位为使得每对光源和探测器与关注点形成等腰三角形并且关注点是每个等腰三角形的公共顶点。三个光源和三个探测器可以集成到单一的观测设备中。
7、在一个实施方式中,成对的第一光源和第一探测器和成对的第二光源和第二探测器设置在x轴上,而成对的第三光源和第三探测器设置在y轴上,以使第一光源靠近第二探测器并且使第二光源靠近第一探测器。
8、在这个实施方式中,根据dz=dz1/(2*sin(θ))计算垂直位移(dz),其中dz1是由于表面的垂直位移的变化而导致的反射的光的位置变化并且θ是光朝向物体的投射轴与基面之间的角度,其中光源与探测器之间的连线位于基面中并且基面平行于物体的表面。
9、根据δ=arctan(dz/sqrt(l*2+b*2))/2计算围绕x轴的旋转位移(δ),其中dz是由于围绕x轴的旋转位移的变化而导致的反射的光的位置变化,b是由一个光源、与其对应的探测器和关注点形成的三角形的底边的长度,并且l是到三角形的底边的高度的长度。
10、根据ρ=arctan(dy/sqrt(l*2+b*2))/2计算围绕y轴的旋转位移(ρ),其中dy是由于围绕y轴的旋转位移的变化而导致的反射的光的位置变化,b是由一个光源、与其对应的探测器和关注点形成的三角形的底边的长度,并且l是到三角形的底边的高度的长度。
11、在另一个实施方式中,成对的第一光源和第一探测器设置在x轴上、成对的第二光源和第二探测器设置在关注点的正上方并且成对的第三光源和第三探测器设置在y轴上。
12、此外,可以随时间计算三个位移值,从而可以确定沿着关注点处的表面传播的波的方向和频率中的至少一个。
13、在另一个方面中,提出了一种用于测量物体的表面上的振动的系统。该系统包括:第一光源,其被配置为沿着第一投射轴朝向物体的表面上的关注点投射光;第一光探测器,其被配置为探测主要来自于第一光源的光,其中该光被表面上的关注点反射;第二光源,其被配置为沿着第二投射轴朝向物体的表面上的关注点投射光;第二光探测器,其被配置为探测主要来自于第二光源的光,其中该光被表面上的关注点反射;第三光源,其被配置为沿着投射轴朝向物体的表面上的关注点投射光;第三光探测器,其被配置为探测主要来自于第三光源的光,其中该光被表面上的关注点反射。处理器与第一光探测器、第二光探测器和第三光探测器数据通信。处理器确定被第一光探测器、第二光探测器和第三光探测器中的至少一个探测到的反射的光的位置变化并且根据位置变化使用三角测量来计算关注点处的表面的垂直位移。
14、处理器还使用三角测量计算关注点处的表面围绕x轴的旋转位移;使用三角测量计算关注点处的表面围绕y轴的旋转位移,其中x轴和y轴限定与物体的表面平行的平面。
15、在一个示例实施方式中,三个光源和三个探测器设置在基面中,其中基面平行于物体的表面。另外,三个光源和三个探测器相对于物体的表面被定位为使得每对光源和探测器与关注点形成等腰三角形并且关注点是每个等腰三角形的公共顶点。三个光源和三个探测器可以集成到单一的观测设备中。
16、在一个实施方式中,成对的第一光源和第一探测器以及成对的第二光源和第二探测器设置在x轴上,而成对的第三光源和第三探测器设置在y轴上,使得第一光源靠近第二探测器并且使第二光源靠近第一探测器。
17、在另一个实施方式中,成对的第一光源和第一探测器设置在x轴上,成对的第二光源和第二探测器设置在关注点的正上方,并且成对的第三光源和第三探测器设置在y轴上。
18、进一步的适用范围将从本文提供的描述变得显而易见。描述和本技术实现要素:中的具体例子仅用于说明的目的,并非是用于限制本发明的范围。
技术特征:1.一种用于测量物体的表面上的振动的非接触式方法,其包括:
2.根据权利要求1所述的非接触式方法,其还包括根据dz=dz1/(2*sin(θ))来计算垂直位移,其中dz1是反射的光在所述探测器上的所述位置变化并且θ是所述投射轴与基面之间的角度,其中所述光源与所述探测器之间的连线位于所述基面中并且所述基面平行于所述物体的所述表面。
3.根据权利要求1所述的非接触式方法,其中,将所述光源进一步限定为激光器。
4.根据权利要求1所述的非接触式方法,其中,将所述探测器进一步限定为电荷耦合设备。
5.根据权利要求1所述的非接触式方法,其中,将所述处理器进一步限定为现场可编程门阵列。
6.根据权利要求1所述的非接触式方法,其中,所述探测器以大于40000的每秒帧率探测被所述表面上的所述关注点反射的光。
7.一种用于测量物体的表面上的振动的非接触式方法,其包括:
8.根据权利要求7所述的非接触式方法,其还包括将三个所述光源和三个所述探测器设置在基面中,其中所述基面平行于所述物体的所述表面。
9.根据权利要求7所述的非接触式方法,其还包括相对于所述物体的所述表面将三个所述光源和三个所述探测器定位为使得每对光源和探测器与所述关注点形成等腰三角形并且所述关注点是每个所述等腰三角形的公共顶点。
10.根据权利要求7所述的非接触式方法,其还包括将三个所述光源和三个所述探测器集成到观测设备中。
11.根据权利要求7所述的非接触式方法,其还包括将来自三个所述光源中的每一个的光分成多条光束,其中所述光束周期性地彼此间隔开。
12.根据权利要求8所述的非接触式方法,其还包括将成对的第一光源和第一探测器和成对的第二光源和第二探测器设置在所述x轴上并且将成对的第三光源和第三探测器设置在所述y轴上,以使所述第一光源靠近所述第二探测器并且使所述第二光源靠近所述第一探测器。
13.根据权利要求12所述的非接触式方法,其还包括根据dz=dz1/(2*sin(θ))来计算垂直位移(dz),其中dz1是由于所述表面的垂直位移的变化而导致的反射的光的位置变化并且θ是光朝向所述物体的投射轴与基面之间的角度,其中所述光源与所述探测器之间的连线位于所述基面中并且所述基面平行于所述物体的所述表面。
14.根据权利要求12所述的非接触式方法,其还包括根据δ=arctan(dz/sqrt(l*2+b*2))/2来计算围绕所述x轴的旋转位移(δ),其中dz是由于围绕所述x轴的旋转位移的变化而导致的反射的光的位置变化,b是由一个所述光源、与其对应的所述探测器和所述关注点形成的三角形的底边的长度,并且l是到所述三角形的所述底边的高度的长度。
15.根据权利要求12所述的非接触式方法,其还包括根据ρ=arctan(dy/sqrt(l*2+b*2))/2来计算围绕所述y轴的旋转位移(ρ),其中dy是由于围绕所述y轴的旋转位移的变化而导致的反射的光的位置变化,b是由一个所述光源、与其对应的所述探测器和所述关注点形成的三角形的底边的长度,并且l是到所述三角形的所述底边的高度的长度。
16.根据权利要求8所述的非接触式方法,其还包括将成对的第一光源和第一探测器设置在所述x轴上、将成对的第二光源和第二探测器设置在所述关注点的正上方并且将成对的第三光源和第三探测器设置在所述y轴上。
17.根据权利要求7所述的非接触式方法,其中,将所述光源进一步限定为激光器并且将所述探测器进一步限定为电荷耦合设备。
18.根据权利要求7所述的非接触式方法,其还包括计算所述关注点处的所述表面随时间的垂直位移;计算所述关注点处的所述表面围绕所述x轴的随时间的旋转位移;计算所述关注点处的所述表面围绕所述y轴的随时间的旋转位移;以及使用所述表面的所述随时间的垂直位移、所述表面围绕所述x轴的所述随时间的旋转位移和所述表面围绕所述y轴的所述随时间的旋转位移来确定沿着所述关注点处的所述表面传播的波的方向和频率中的至少一个。
19.一种用于测量物体的表面上的振动的系统,其包括:
20.根据权利要求19所述的系统,其中,所述处理器还使用三角测量计算所述关注点处的所述表面围绕x轴的旋转位移;使用三角测量计算所述关注点处的所述表面围绕y轴的旋转位移,其中所述x轴和所述y轴限定与所述物体的所述表面平行的平面。
21.根据权利要求20所述的系统,其中,所述第一光源、所述第一光探测器、所述第二光源、所述第二光探测器、所述第三光源以及所述第三光探测器设置在基面中,其中所述基面平行于所述物体的所述表面。
22.根据权利要求21所述的系统,其中,所述第一光源、所述第一光探测器、所述第二光源、所述第二光探测器、所述第三光源以及所述第三光探测器相对于所述物体的所述表面被定位为使得每对光源和探测器与所述关注点形成等腰三角形并且所述关注点是每个所述等腰三角形的公共顶点。
23.根据权利要求21所述的系统,其中,三个光源和三个探测器被集成到观测设备中。
24.根据权利要求21所述的系统,其中,所述第一光源、所述第一光探测器、所述第二光源以及所述第二光探测器设置在所述x轴上并且所述第三光源和所述第三光探测器设置在所述y轴上,使得所述第一光源靠近所述第二光探测器并且使所述第二光源靠近所述第一光探测器。
25.根据权利要求21所述的系统,其中,所述第一光源和所述第一光探测器设置在所述x轴上,所述第二光源和所述第二光探测器设置在所述关注点的正上方,并且所述第三光源和所述第三光探测器设置在所述y轴上。
技术总结提出了一种用于测量物体的表面上的振动的非接触式方法。该方法包括:从三个光源朝向物体的表面上的关注点投射光,以及使用三个探测器探测被表面上的关注点反射的光,其中三个探测器中的每个探测器捕捉来自三个光源中的对应的一个光源的光。根据所捕捉的光,使用三角测量计算关注点处的表面的垂直位移,使用三角测量计算关注点处的表面围绕x轴的旋转位移;并且使用三角测量计算关注点处的表面围绕y轴的旋转位移,其中x轴和y轴限定与物体的表面平行的平面。技术研发人员:卡尔·斯拉马,马克·劳赫富斯受保护的技术使用者:并发数据公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/298025.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表