手术机器人、控制台的控制权转移方法、介质及产品与流程
- 国知局
- 2024-09-19 14:33:36
本发明涉及医疗器械,尤其涉及一种手术机器人、控制台的控制权转移方法、介质及产品。
背景技术:
1、手术机器人通常设置有至少两个控制台,但手术过程中,通常仅有一个控制台为主控制台,其他控制台为副控制台。只有主控制台可控制机械臂执行相应的手术操。为了保证手术的实施,上位机在检测到主控制台故障或失联的情况下,将副控制台设置为主控制台,以使用户使用当前的主控制台完成剩余的手术内容。
2、虽然现有技术可以通过将副控制台升为主控制台的方式,使用户继续手术,但该过程通常存在可感知的通讯中断,即现有技术在主控制台出现故障时,无法在没有感知到通讯中断的情况下完成控制权的转移。
技术实现思路
1、本发明提供了一种手术机器人、控制台的控制权转移方法、介质及产品,以解决现有手术机器人无法在没有感知到通讯中断的情况下完成控制权转移的问题。
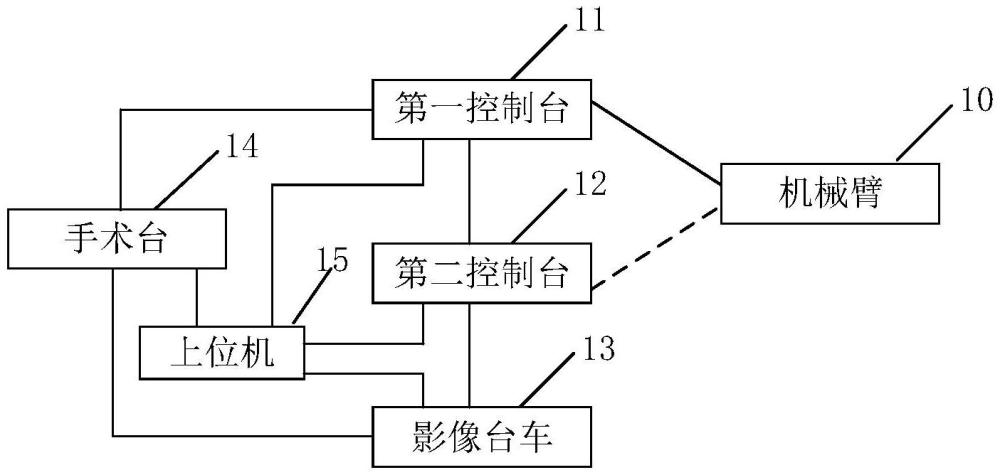
2、根据本发明的一方面,提供了一种手术机器人,包括:机械臂、控制台组合、影像台车、手术台与上位机;
3、所述控制台组合被设置为,包括主控制台与至少一个非主控制台,所述主控制台用于通过控制指令控制所述机械臂执行对应手术操作;
4、所述手术台用于承载所述机械臂的手术对象;
5、所述影像台车用于承载床边影像设备;
6、所述控制台组合中的各控制台、所述影像台车与手术台采用双向环通讯方式进行数据通讯;
7、所述控制台设置有第一数量的通讯电路板,所述影像台车设置有第二数量的通讯电路板,所述手术台设置有第三数量的通讯电路板;
8、所述上位机用于实时检测所有所述通讯电路板的状态以得到当前状态标识组合,在所述当前状态标识组合为目标状态标识组合的情况下,将所述主控制台的控制权转移至所述至少一个非主控制台中的设定控制台。
9、根据本发明的另一方面,提供了一种控制台的控制权转移方法,应用于手术机器人,包括:
10、实时检测所有所述通讯电路板的状态标识,以得到当前状态标识组合;
11、在所述当前状态标识组合为目标状态标识组合的情况下,将所述主控制台的控制权转移至所述至少一个非主控制台中的设定控制台。
12、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的控制权转移方法。
13、根据本发明的另一方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如本发明实施例中任一所述的控制台的控制权转移方法。
14、本发明实施例提供的技术方案,通过使控制台组合中的各控制台、影像台车与手术台采用双向环通讯方式,在某一方向通讯线路出现故障的情况下,通过另一方向的通讯线路完成通讯,达到了通过冗余通讯保证数据通讯的安全性与稳定性的技术效果;控制台、影像台车与手术台均设置有对应数量的通讯电路板,实时检测所有通讯电路板的状态以得到当前状态标识组合,并在当前状态标识组合为目标状态标识组合的情况下,将主控制台的控制权转移至该至少一个非主控制台中的设定控制台,实现了基于所有通讯电路板的状态标识,确定手术机器人的故障是否可通过控制权转移来避免其对手术的影响,如果是,则将主控制台的控制权转移至该至少一个非主控制台中的设定控制台,以提高手术机器人工作的稳定性,以避免出现因手术机器人故障导致手术过程不顺利情况的发生。
15、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种手术机器人,其特征在于,包括:机械臂、控制台组合、影像台车、手术台与上位机;
2.根据权利要求1所述的手术机器人,其特征在于,
3.根据权利要求2所述的手术机器人,其特征在于,
4.根据权利要求3所述的手术机器人,其特征在于,
5.根据权利要求1所述的手术机器人,其特征在于,
6.根据权利要求5所述的手术机器人,其特征在于,
7.根据权利要求1所述的手术机器人,其特征在于,
8.一种控制台的控制权转移方法,其特征在于,应用于权利要求1–7任一所述的手术机器人,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求8所述的控制台的控制权转移方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求8所述的控制台的控制权转移方法。
技术总结本发明公开了一种手术机器人、控制台的控制权转移方法、介质及产品。手术机器人包括:机械臂、控制台组合、影像台车、手术台与上位机;控制台组合包括主控制台与至少一个非主控制台;控制台组合中的各控制台、影像台车与手术台采用双向环通讯方式进行数据通讯;控制台设置有第一数量的通讯电路板,影像台车设置有第二数量的通讯电路板,手术台设置有第三数量的通讯电路板;上位机用于实时检测所有通讯电路板的状态以得到当前状态标识组合,在当前状态标识组合为目标状态标识组合的情况下,将主控制台的控制权转移至至少一个非主控制台中的设定控制台。本发明实施例能够在主控制台出现故障的情况下,及时完成控制权的转移。技术研发人员:张顿坦,庞海峰,苏衍宇受保护的技术使用者:哈尔滨思哲睿智能医疗设备股份有限公司技术研发日:技术公布日:2024/9/17本文地址:https://www.jishuxx.com/zhuanli/20240919/298831.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表