一种化妆品物料分拣机器人的制作方法
- 国知局
- 2024-10-09 15:54:09
本发明涉及机器人,具体为一种化妆品物料分拣机器人。
背景技术:
1、通常化妆品的生产过程涉及到多种原料和成分,并需要在生产线上进行分拣、混合和包装等环节。传统的化妆品生产方式存在人工分拣效率低、成本高、容易出错等问题,因此引入分拣机器人成为了提高生产效率和降低生产成本的重要手段。化妆品分拣机器人是一种通过先进的感知、运动技术和智能算法来实现化妆品物料自动分类和分拣的装置。它可以根据化妆品的种类、规格和目标区域的需求,精准地将不同种类的化妆品原料进行分拣,大大提高了生产效率和质量稳定性。
2、目前用于化妆品物料分拣的机器人是通用工业机器人,通常是利用机械手进行生产物料的点对点转移,机械手可以竖直和平行移动,将物料平稳的放置,因此其进行一个物料的分拣时行程和所需时间很长。而目前大部分化妆品物料包装良好,具有一定的抗摔能力,分拣机器人的缓慢动作成为了制约物料分拣速度的主要因素。
技术实现思路
1、本发明的目的在于提供一种化妆品物料分拣机器人,以解决上述背景技术中提出的问题。
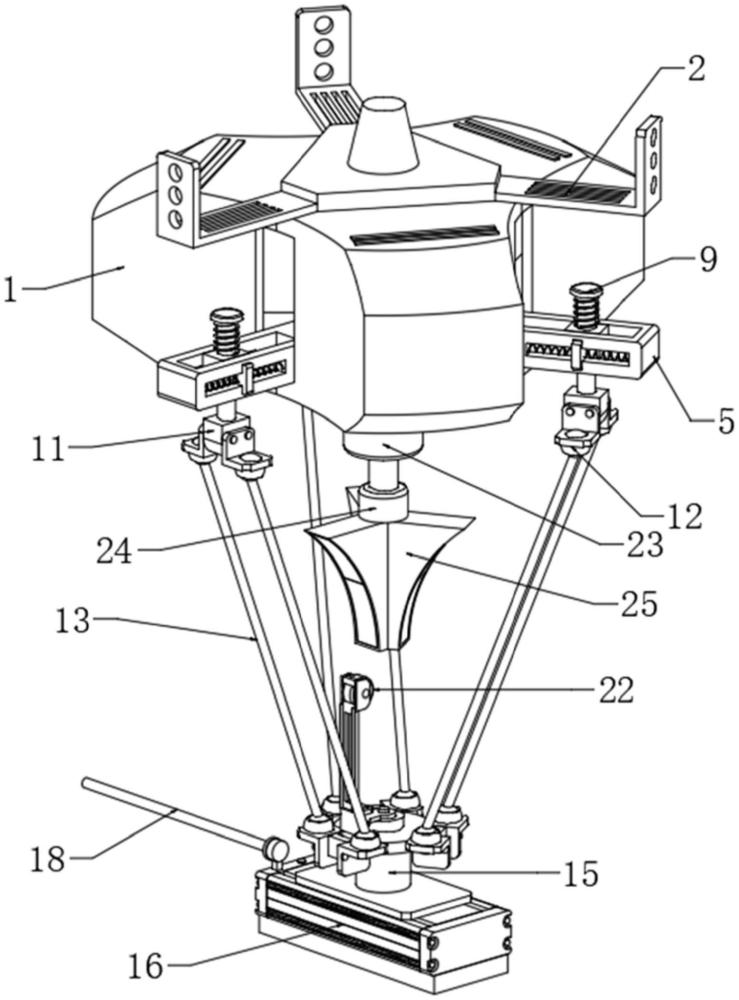
2、为实现上述目的,本发明提供如下技术方案:一种化妆品物料分拣机器人,包括机器人主体,所述机器人主体中升降安装有升降座,且升降座上环形设置有至少三个扩散座,所述扩散座中设置有活动槽,且活动槽中滑动安装有活动座,所述活动座上固定连接有横向弹簧,且活动座上滑动安装有滑杆,所述滑杆上固定连接有竖向弹簧,且滑杆底部安装有底座,所述底座通过吊杆安装有抓手,且吊杆通过球面副连接在底座和抓手之间,所述抓手上连接有海绵吸盘,且抓手上定向转动安装有支杆,且支杆上安装有导向轮,所述机器人主体底部安装有高度可调的多向导座,且多向导座位于抓手上方,且多向导座设置有至少三个弧形面,且弧形面朝向吊杆进行设置,且弧形面上设置有固定导板,所述固定导板上连接有弯折导板,且弯折导板顶部连接有具有弹性的吊绳,所述多向导座中活动安装有推杆,且推杆能够通过推动弯折导板使其改变弯折角度,所述推杆的推动距离通过多向导座中的调节机构进行控制。
3、优选的,所述机器人主体通过吊架固定安装在化妆品生产线中,且机器人主体的腔体中安装有升降导轨,所述升降座通过升降导轨进行驱动,且扩散座连接在机器人主体的限位槽中。
4、优选的,所述活动槽沿着扩散座的方向水平设置,且横向弹簧连接在活动槽中,所述滑杆贯穿活动座进行设置,且竖向弹簧与滑杆的顶端连接。
5、优选的,所述底座上安装有上球面座,且抓手上安装有下球面座,所述吊杆连接在上球面座和下球面座之间,且下球面座环形设置在抓手上,所述海绵吸盘上设置有供气接头,且供气接头通过气管外接于气压控制装置。
6、优选的,所述抓手顶面设置有切换轴,且切换轴上连接有切换架,所述支杆安装在切换架上,且导向轮安装在支杆的顶端,通过切换轴的转动能够将切换架转动到某个吊杆的侧面。
7、优选的,所述机器人主体的底部安装有伸缩杆,且伸缩杆的端部设置有驱动座,所述多向导座安装在驱动座上,且多向导座中设置有空腔。
8、优选的,所述固定导板安装在弧形面的下半部分,且弯折导板位于弧形面的上半部分,所述吊绳为伸缩绳,且吊绳连接在弯折导板和多向导座之间。
9、优选的,所述多向导座的空腔中环形设置有导向支座,且导向支座朝向弧形面进行设置,所述推杆滑动安装在导向支座中,且推杆上固定连接有平衡弹簧。
10、优选的,所述推杆的前端转动安装有压头,且压头与弯折导板的内壁接触连接,所述推杆的末端固定连接有带弧面的受压座。
11、优选的,所述驱动座上设置有调节轴,且调节轴通过驱动座中的伺服驱动装置进行驱动,所述调节轴位于多向导座的空腔中,且调节轴上连接有多向凸轮,所述多向凸轮与受压座接触连接。
12、与现有技术相比,本发明的有益效果是:
13、1.本发明的分拣机器人设置在化妆品生产线中,机器人主体中通过升降导轨进行了升降座的安装,从而产生竖直方向的移动,仅仅依靠竖直方向上的驱动达到将物料抛出的动作,快速的完成物料转移,提高分拣速度,物料可以更为密集的进入分拣输送带。
14、2.通过升降座设置有多个扩散座,利用扩散座在多个方向上进行吊杆的安装,进而利用多个吊杆进行带海绵吸盘的抓手的设置,并且吊杆是通过活动座、滑杆等部件进行安装的,活动座能够在活动槽中进行水平移动,而滑杆能够在活动座上进行竖直移动,因此,对于单个吊杆而言,其既能在一定限度内平移,也能在一定限度内升降,同时,吊杆的两端是通过球面副连接的,因此吊杆具有多向转动能力,抓手连接在多个吊杆之间,在受到向一侧的导向之后,抓手则能够向着该侧摆动,抓手将物料上提时,利用导向结构带动抓手向一侧摆动,并且通过切换轴可以带动导向结构转动,进而控制抓手的摆动方向,将物料向该侧抛出,达到分拣的效果。
15、3.本发明中的导板分为固定导板和弯折导板,并且固定导板和弯折导板的高度,可以通过伸缩杆带动多向导座升降进行调节,而抓手和物料的上升距离是固定的,当多向导座高度低时,导向轮可以顺着固定导板和弯折导板走完,抓手移动的水平距离更长,使得物料具有更大的水平初速度,反之,当多向导座高度高时,导向轮仅与部分的固定导板接触,抓手移动的水平距离更短,物料具有更小的水平初速度,而对不同重量的物料而言,通过调节水平初速度,可以将其控制在相同的落点范围内,确保物料能够落入相应的接料装置。
16、4.本发明的弯折导板还可以从内部进行推动,使其变形改变弯折度,达到调节抓手水平移动距离,改变物料落点的效果,弯折导板除了利用本身的韧性,还通过具有弹性的吊绳进行限制,防止其过度变形。
技术特征:1.一种化妆品物料分拣机器人,包括机器人主体(1),其特征在于:所述机器人主体(1)中升降安装有升降座(4),且升降座(4)上环形设置有至少三个扩散座(5),所述扩散座(5)中设置有活动槽(6),且活动槽(6)中滑动安装有活动座(7),所述活动座(7)上固定连接有横向弹簧(8),且活动座(7)上滑动安装有滑杆(9),所述滑杆(9)上固定连接有竖向弹簧(10),且滑杆(9)底部安装有底座(11),所述底座(11)通过吊杆(13)安装有抓手(15),且吊杆(13)通过球面副连接在底座(11)和抓手(15)之间,所述抓手(15)上连接有海绵吸盘(16),且抓手(15)上定向转动安装有支杆(21),且支杆(21)上安装有导向轮(22),所述机器人主体(1)底部安装有高度可调的多向导座(25),且多向导座(25)位于抓手(15)上方,且多向导座(25)设置有至少三个弧形面,且弧形面朝向吊杆(13)进行设置,且弧形面上设置有固定导板(26),所述固定导板(26)上连接有弯折导板(27),且弯折导板(27)顶部连接有具有弹性的吊绳(28),所述多向导座(25)中活动安装有推杆(30),且推杆(30)能够通过推动弯折导板(27)使其改变弯折角度,所述推杆(30)的推动距离通过多向导座(25)中的调节机构进行控制。
2.根据权利要求1所述的一种化妆品物料分拣机器人,其特征在于:所述机器人主体(1)通过吊架(2)固定安装在化妆品生产线中,且机器人主体(1)的腔体中安装有升降导轨(3),所述升降座(4)通过升降导轨(3)进行驱动,且扩散座(5)连接在机器人主体(1)的限位槽中。
3.根据权利要求1所述的一种化妆品物料分拣机器人,其特征在于:所述活动槽(6)沿着扩散座(5)的方向水平设置,且横向弹簧(8)连接在活动槽(6)中,所述滑杆(9)贯穿活动座(7)进行设置,且竖向弹簧(10)与滑杆(9)的顶端连接。
4.根据权利要求1所述的一种化妆品物料分拣机器人,其特征在于:所述底座(11)上安装有上球面座(12),且抓手(15)上安装有下球面座(14),所述吊杆(13)连接在上球面座(12)和下球面座(14)之间,且下球面座(14)环形设置在抓手(15)上,所述海绵吸盘(16)上设置有供气接头(17),且供气接头(17)通过气管(18)外接于气压控制装置。
5.根据权利要求1所述的一种化妆品物料分拣机器人,其特征在于:所述抓手(15)顶面设置有切换轴(19),且切换轴(19)上连接有切换架(20),所述支杆(21)安装在切换架(20)上,且导向轮(22)安装在支杆(21)的顶端,通过切换轴(19)的转动能够将切换架(20)转动到某个吊杆(13)的侧面。
6.根据权利要求1所述的一种化妆品物料分拣机器人,其特征在于:所述机器人主体(1)的底部安装有伸缩杆(23),且伸缩杆(23)的端部设置有驱动座(24),所述多向导座(25)安装在驱动座(24)上,且多向导座(25)中设置有空腔。
7.根据权利要求1所述的一种化妆品物料分拣机器人,其特征在于:所述固定导板(26)安装在弧形面的下半部分,且弯折导板(27)位于弧形面的上半部分,所述吊绳(28)为伸缩绳,且吊绳(28)连接在弯折导板(27)和多向导座(25)之间。
8.根据权利要求6所述的一种化妆品物料分拣机器人,其特征在于:所述多向导座(25)的空腔中环形设置有导向支座(29),且导向支座(29)朝向弧形面进行设置,所述推杆(30)滑动安装在导向支座(29)中,且推杆(30)上固定连接有平衡弹簧(33)。
9.根据权利要求8所述的一种化妆品物料分拣机器人,其特征在于:所述推杆(30)的前端转动安装有压头(31),且压头(31)与弯折导板(27)的内壁接触连接,所述推杆(30)的末端固定连接有带弧面的受压座(32)。
10.根据权利要求9所述的一种化妆品物料分拣机器人,其特征在于:所述驱动座(24)上设置有调节轴(34),且调节轴(34)通过驱动座(24)中的伺服驱动装置进行驱动,所述调节轴(34)位于多向导座(25)的空腔中,且调节轴(34)上连接有多向凸轮(35),所述多向凸轮(35)与受压座(32)接触连接。
技术总结本发明涉及机器人技术领域,具体为一种化妆品物料分拣机器人,包括机器人主体,机器人主体中升降安装有升降座,升降座上环形设置有扩散座,扩散座中设置有活动座,活动座上滑动安装有滑杆,滑杆底部安装有底座,底座通过吊杆安装有抓手,抓手上定向转动安装有支杆,支杆上安装有导向轮,机器人主体底部安装有高度可调的多向导座,多向导座位于抓手上方,多向导座设置有至少三个弧形面,弧形面朝向吊杆进行设置,弧形面上设置有固定导板,固定导板上连接有弯折导板,弯折导板顶部连接有具有弹性的吊绳,多向导座中活动安装有推杆。本发明的分拣机器人设置在化妆品生产线中,能够快速将物料抛出以完成高效分拣。技术研发人员:景祥,王长路,张立勇,王冠博,王晶,李东辉,石博今,毛峰,陆泓伊,丁子芸受保护的技术使用者:江苏中工高端装备研究院有限公司技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/310704.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表