手术机器人、机器人从动系统以及机器人控制系统的制作方法
- 国知局
- 2024-10-09 16:01:43
本申请涉及医学,特别是涉及一种手术机器人、机器人从动系统以及机器人控制系统。
背景技术:
1、利用扫描设备,例如锥形束电子计算机断层扫描(cone beam computedtomography,cbct)辅助穿刺越来越广泛地应用于医学领域中。
2、然而,当经皮进行腔道穿刺时,比如穿刺胆道、门静脉时,cbct难以对目标腔道直接进行三维成像,导致穿刺目标的空间位置难以确定。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够定位穿刺目标的手术机器人、机器人从动系统以及机器人控制系统。
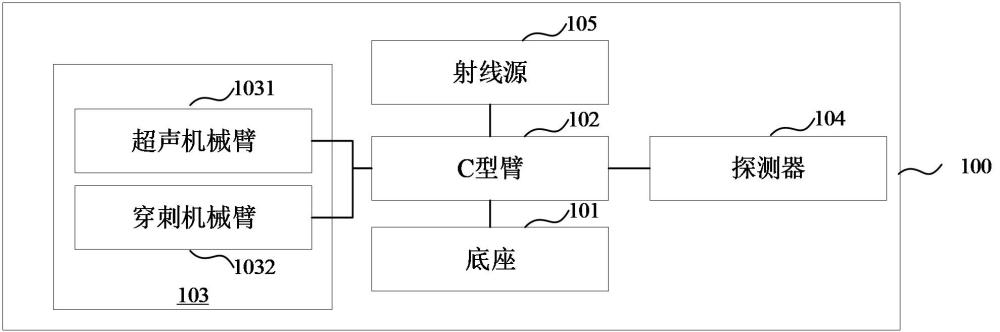
2、第一方面,本申请提供了一种手术机器人,包括:底座101、与底座101连接的c型臂102、设置于c型臂102的内侧的目标机械臂103、设置于c型臂102的第一端的探测器104以及设置于c型臂102的第二端的射线源105;
3、目标机械臂103包括超声机械臂1031和穿刺机械臂1032。
4、在其中一个实施例中,目标机械臂103包括第一关节103a以及与第一关节103a连接的第一机械臂103b,第一关节103a设置于c型臂102的内侧。
5、在其中一个实施例中,目标机械臂103还包括第二关节103c和第二机械臂103d,第一机械臂103b与第二机械臂103d通过第二关节103c连接。
6、在其中一个实施例中,目标机械臂103还包括第三关节103e和目标部件103f,目标部件103f与第二机械臂103d通过第三关节103e连接;
7、在目标机械臂103为超声机械臂1031的情况下,目标部件103f为超声探头1031f;
8、在目标机械臂103为穿刺机械臂1032的情况下,目标部件103f为穿刺部件1032f。
9、在其中一个实施例中,手术机器人100还包括造影剂注射器201,造影剂注射器201设置于c型臂102,造影剂注射器201的注射端与穿刺部件1032f可拆卸连接。
10、在其中一个实施例中,c型臂102内侧的超声机械臂1031在穿刺机械臂1032的左侧。
11、在其中一个实施例中,c型臂102通过滑轨202与底座101连接。
12、在其中一个实施例中,底座101通过第一旋转部件701与滑轨202连接。
13、第二方面,本申请还提供了一种机器人从动系统,包括:机器人控制器1001以及上述任一项的手术机器人100,机器人控制器1001与手术机器人100通信连接。
14、在其中一个实施例中,机器人从动系统1000还包括至少一个传感器1101,传感器1101设置于目标机械臂103;
15、传感器1101与机器人控制器1001通信连接。
16、第三方面,本申请还提供了一种机器人控制系统,包括机器人主动系统1201以及如上述的机器人从动系统1000;
17、机器人主动系统1201包括控制装置1201a,控制装置1201a与机器人控制器1001通信连接。
18、在其中一个实施例中,机器人主动系统1201还包括路径规划装置1201b,路径规划装置1201b与控制装置1201a通信连接。
19、在其中一个实施例中,机器人主动系统1201还包括手柄装置1201c,手柄装置1201c与控制装置1201a通信连接。
20、上述手术机器人、机器人从动系统以及机器人控制系统,由于手术机器人包括底座、与所述底座连接的c型臂、设置于所述c型臂的内侧的目标机械臂、设置于所述c型臂的第一端的探测器以及设置于所述c型臂的第二端的射线源。由于目标机械臂设置在c型臂上,一方面,利用目标机械臂替代医生操作,医生不需要穿着铅衣站立于c型臂附近,因此能够减少医生的辐射。另一方面,能够降低手术机器人的占地面积,节省空间。进一步地,由于目标机械臂包括超声机械臂和穿刺机械臂,因此,能够实现穿刺过程中的实时超声引导,使其能够定位cbct无法成像的穿刺目标并执行穿刺,提高了穿刺精度和手术效率。更进一步地,由于目标机械臂与c型臂处于同一坐标系下,这样,不需要额外再进行c型臂所在的造影机与机械臂之间的配准工作,避免c型臂和机械臂之间运动导致空间重叠的问题。
技术特征:1.一种手术机器人,其特征在于,所述手术机器人(100)包括底座(101)、与所述底座(101)连接的c型臂(102)、设置于所述c型臂(102)的内侧的目标机械臂(103)、设置于所述c型臂(102)的第一端的探测器(104)以及设置于所述c型臂(102)的第二端的射线源(105);
2.根据权利要求1所述的手术机器人,其特征在于,所述目标机械臂(103)包括第一关节(103a)以及与所述第一关节(103a)连接的第一机械臂(103b),所述第一关节(103a)设置于所述c型臂(102)的内侧。
3.根据权利要求2所述的手术机器人,其特征在于,所述目标机械臂(103)还包括第二关节(103c)和第二机械臂(103d),所述第一机械臂(103b)与所述第二机械臂(103d)通过所述第二关节(103c)连接。
4.根据权利要求3所述的手术机器人,其特征在于,所述目标机械臂(103)还包括第三关节(103e)和目标部件(103f),所述目标部件(103f)与所述第二机械臂(103d)通过所述第三关节(103e)连接;
5.根据权利要求4所述的手术机器人,其特征在于,所述手术机器人(100)还包括造影剂注射器(201),所述造影剂注射器(201)设置于所述c型臂(102),所述造影剂注射器(201)的注射端与所述穿刺部件(1032f)可拆卸连接。
6.根据权利要求1-5任一项所述的手术机器人,其特征在于,所述c型臂(102)内侧的超声机械臂(1031)在所述穿刺机械臂(1032)的左侧。
7.根据权利要求1-5任一项所述的手术机器人,其特征在于,所述c型臂(102)通过滑轨(202)与所述底座(101)连接。
8.根据权利要求7所述的机器人,其特征在于,所述底座(101)通过第一旋转部件(701)与所述滑轨(202)连接。
9.一种机器人从动系统,其特征在于,所述机器人从动系统(1000)包括机器人控制器(1001)以及权利要求1-8任一项所述的手术机器人(100),所述机器人控制器(1001)与所述手术机器人(100)通信连接。
10.根据权利要求9所述的机器人从动系统,其特征在于,所述机器人从动系统(1000)还包括至少一个传感器(1101),所述传感器(1101)设置于所述目标机械臂(103);
11.一种机器人控制系统,其特征在于,所述机器人控制系统(1200)包括机器人主动系统(1201)以及如权利要求9或10所述的机器人从动系统(1000);
12.根据权利要求11所述的机器人控制系统(1200),其特征在于,所述机器人主动系统(1201)还包括路径规划装置(1201b),所述路径规划装置(1201b)与所述控制装置(1201a)通信连接。
13.根据权利要求11所述的机器人控制系统,其特征在于,所述机器人主动系统(1201)还包括手柄装置(1201c),所述手柄装置(1201c)与所述控制装置(1201a)通信连接。
技术总结本申请涉及一种手术机器人、机器人从动系统以及机器人控制系统。所述装置包括:手术机器人包括底座、与底座连接的C型臂、设置于C型臂的内侧的目标机械臂、设置于C型臂的第一端的探测器以及设置于C型臂的第二端的射线源;目标机械臂包括超声机械臂和穿刺机械臂。采用本手术机器人能够定位穿刺目标。技术研发人员:谭喆欢,李子蹊受保护的技术使用者:武汉联影智融医疗科技有限公司技术研发日:20231226技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/311272.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表