基于轮廓的空间目标位姿跟踪方法
- 国知局
- 2024-10-09 16:35:03
本申请涉及数据处理,特别是涉及一种基于轮廓的空间目标位姿跟踪方法。
背景技术:
1、空间目标的在轨姿态测量是空间观测、在轨服务、交会对接等任务的关键技术之一。位姿参数,即指空间目标坐标系与观测坐标系之间的姿态和位置关系,包括三自由度的旋转变换和三自由度的平移变换,是衡量和定位目标运动状态的关键指标。在众多位姿测量技术中,如雷达、惯导、星敏感器以及视觉测量等,视觉测量技术凭借其全自主性和直观的可视化特点脱颖而出,已逐步演变为姿态测量的主流手段之一。然而,受太空环境的复杂性以及强光、弱光等极端光照条件的影响,稳定地提取和跟踪空间目标的特征点、线变得异常艰难,这无疑给视觉测量工作带来了极大的挑战。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够实现快速运动的空间目标的持续位姿跟踪的基于轮廓的空间目标位姿跟踪方法。
2、一种基于轮廓的空间目标位姿跟踪方法,所述方法包括:
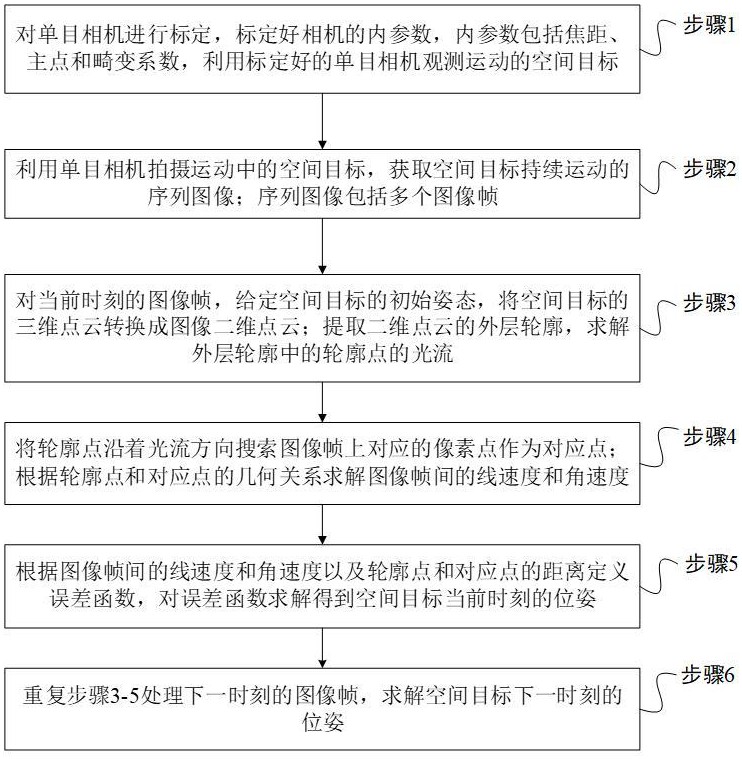
3、步骤1:对单目相机进行标定,标定好相机的内参数,内参数包括焦距、主点和畸变系数,利用标定好的单目相机观测运动的空间目标;
4、步骤2:利用单目相机拍摄运动中的空间目标,获取空间目标持续运动的序列图像;序列图像包括多个图像帧;
5、步骤3:对当前时刻的图像帧,给定空间目标的初始姿态,将空间目标的三维点云转换成图像二维点云;提取二维点云的外层轮廓,求解外层轮廓中的轮廓点的光流,包括:
6、将轮廓点在时刻的灰度值记为,在时刻的灰度值记为,假设相邻帧之间像素的灰度值不变,得到
7、;
8、将进行泰勒展开:
9、;
10、可得:
11、;
12、其中,表示光流;
13、步骤4:将轮廓点沿着光流方向搜索图像帧上对应的像素点作为对应点;根据轮廓点和对应点的几何关系求解图像帧间的线速度和角速度;
14、步骤5:根据图像帧间的线速度和角速度以及轮廓点和对应点的距离定义误差函数,对误差函数求解得到空间目标当前时刻的位姿;
15、步骤6:重复步骤3-步骤5处理下一时刻的图像帧,求解空间目标下一时刻的位姿。
16、在其中一个实施例中,将空间目标的三维点云转换成图像二维点云,包括:
17、假设,空间目标的姿态和三维点云已知,初始时刻的位姿已知,用旋转矩阵和平移向量表示,根据透视投影关系,将目标的三维模型转化成平面二维点云,空间目标的三维点和对应的二维点,关系如下:
18、;
19、其中,是三维点的深度。
20、在其中一个实施例中,根据轮廓点和对应点的几何关系求解图像帧间的线速度和角速度,包括:
21、设空间目标的三维速度为,则线速度和角速度的求解式分别为和,物体速度公式为
22、;
23、根据空间目标的三维点和对应的二维点的关系对时间求导,得到求导公式为
24、;
25、利用物体速度公式和求导公式进行推导,建立轮廓点和对应点的关联式为
26、;
27、其中,表示光流,沿着光流方向建立轮廓点和对应点的关联,求解得到图像帧间的线速度和角速度。
28、在其中一个实施例中,根据图像帧间的线速度和角速度以及轮廓点和对应点的距离定义误差函数,对误差函数求解得到空间目标当前时刻的位姿,包括:
29、将图像帧间的线速度和角速度转换成图像帧间的位姿变化,得到相对旋转矩阵和相对平移向量;根据相对旋转矩阵和相对平移向量设定下一时刻的初始位姿;
30、根据下一时刻的初始位姿以及轮廓点和对应点的距离定义误差函数,对误差函数求解得到空间目标当前时刻的位姿。
31、在其中一个实施例中,根据相对旋转矩阵和相对平移向量设定下一时刻的初始位姿,包括:
32、根据相对旋转矩阵和相对平移向量设定下一时刻的初始位姿为
33、;
34、其中,为相对旋转矩阵,为相对平移向量,为初始时刻的旋转矩阵,为初始时刻的平移向量,表示下一时刻的初始旋转矩阵,表示下一时刻的初始平移向量。
35、在其中一个实施例中,根据下一时刻的初始位姿以及轮廓点和对应点的距离定义误差函数,包括:
36、根据下一时刻的初始位姿以及轮廓点和对应点的距离定义误差函数为
37、;
38、其中,表示第个的轮廓点,表示第个轮廓点的对应点,表示距离,表示优化后的旋转矩阵,表示优化后平移向量。
39、上述基于轮廓的空间目标位姿跟踪方法,首先对单目相机进行标定,获取相机的内参数;利用单目相机采集空间目标运动的序列图像;根据预先设置的投影关系将空间目标的三维模型投影到图像上;寻找投影模型的外轮廓点,提取二维点云的外层轮廓,求解外层轮廓中的轮廓点的光流,将轮廓点沿着光流方向搜索图像帧上对应的像素点作为对应点;根据轮廓点和对应点的几何关系求解图像帧间的线速度和角速度;计算轮廓点和对应点的距离作为误差项,根据图像帧间的线速度和角速度以及轮廓点和对应点的距离构建误差函数求解空间目标的位姿。在复杂光照的空间环境中,本申请能够稳定跟踪快速运动的空间目标。
技术特征:1.一种基于轮廓的空间目标位姿跟踪方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,将空间目标的三维点云转换成图像二维点云,包括:
3.根据权利要求1所述的方法,其特征在于,根据轮廓点和对应点的几何关系求解图像帧间的线速度和角速度,包括:
4.根据权利要求1所述的方法,其特征在于,根据图像帧间的线速度和角速度以及轮廓点和对应点的距离定义误差函数,对所述误差函数求解得到空间目标当前时刻的位姿,包括:
5.根据权利要求4所述的方法,其特征在于,根据所述相对旋转矩阵和相对平移向量设定下一时刻的初始位姿,包括:
6.根据权利要求5所述的方法,其特征在于,根据下一时刻的初始位姿以及轮廓点和对应点的距离定义误差函数,包括:
技术总结本申请涉及一种基于轮廓的空间目标位姿跟踪方法。所述方法包括:利用标定好的单目相机观测运动的空间目标;获取空间目标持续运动的序列图像;对当前时刻的图像帧,给定空间目标的初始姿态,将空间目标的三维点云转换成图像二维点云;提取二维点云的外层轮廓,求解外层轮廓中的轮廓点的光流;将轮廓点沿着光流方向搜索图像帧上对应的像素点作为对应点;根据轮廓点和对应点的几何关系求解图像帧间的线速度和角速度;根据图像帧间的线速度和角速度以及轮廓点和对应点的距离定义误差函数,对误差函数求解得到空间目标当前时刻的位姿。采用本方法能够实现快速运动的空间目标的持续位姿跟踪。技术研发人员:关棒磊,刘子宾,尚洋,查牧希,扁逸飞,于起峰受保护的技术使用者:中国人民解放军国防科技大学技术研发日:技术公布日:2024/9/26本文地址:https://www.jishuxx.com/zhuanli/20240929/313450.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。