一种基于贪婪算法的路径规划方法与流程
- 国知局
- 2024-10-09 14:42:06
本发明涉及路径规划领域,尤其涉及一种基于贪婪算法的路径规划方法。
背景技术:
1、在当今日益繁忙的城市生活中,人们对路径规划的需求变得越来越迫切。从通勤、物流到旅游,路径规划贯穿了人们的各个生活领域。然而,传统的路径规划方法往往受限于静态路网和简单的算法,无法应对城市交通的复杂性和动态性。与此同时,随着交通工具的多样化和智能化,以及交通数据的大规模产生和应用,路径规划技术面临着新的挑战和机遇。路径规划技术的发展一直是人工智能、交通领域和城市规划的焦点之一。传统的规划方法主要基于启发式算法和静态地图数据,这在一定程度上满足了基本的需求,但难以适应日益复杂和动态变化的城市交通环境;因此,发明出一种基于贪婪算法的路径规划方法变得尤为重要。
2、经检索,中国公布号cn113467481a公开了一种基于改进sarsa算法的路径规划方法,该发明虽然能够有效减少算法的总步数与平均每轮步数,提高了算法的性能,但是无法全面地搜索整个路径空间,无法应对实时交通状况的变化,降低找到最优路径的机会;此外,现有的路径规划方法的路径规划无法贴近实际情况,降低路径规划的准确性和实用性,降低用户的出行体验和路径选择的满意度;为此,我们提出一种基于贪婪算法的路径规划方法。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种基于贪婪算法的路径规划方法。
2、为了实现上述目的,本发明采用了如下技术方案:
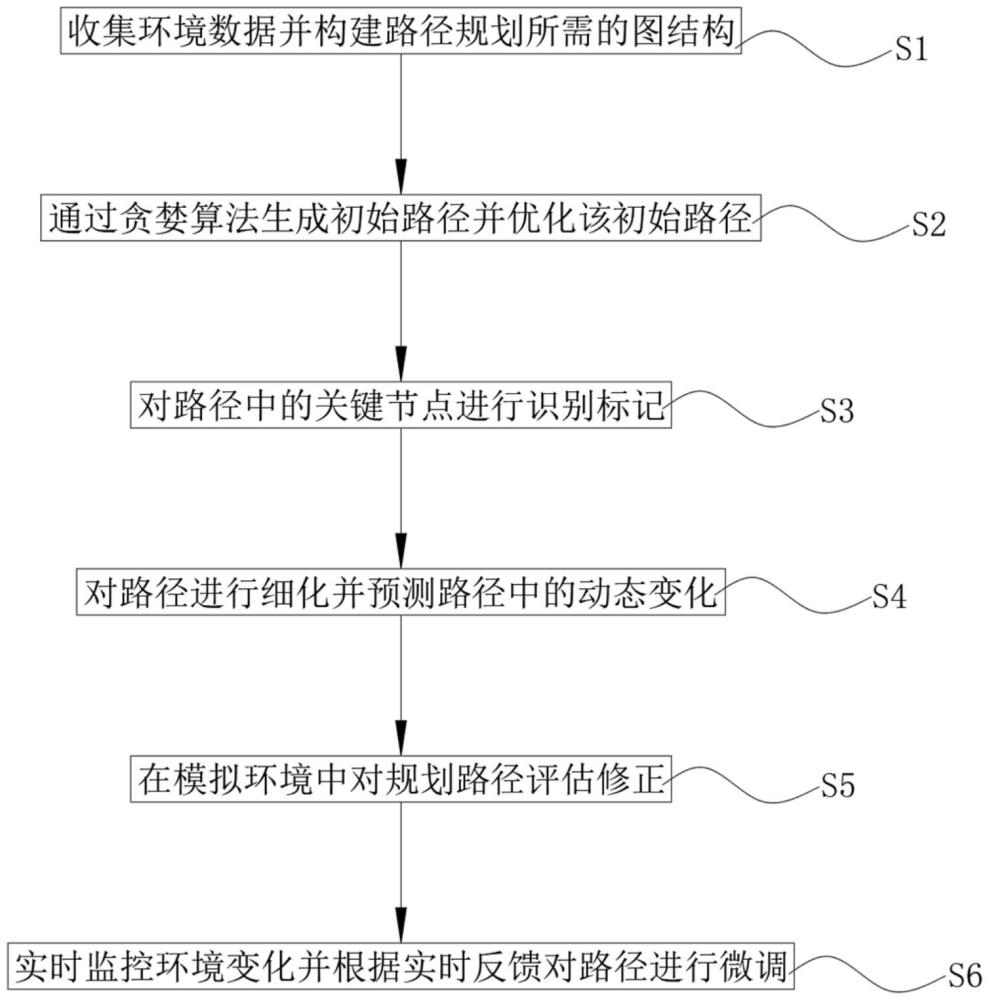
3、一种基于贪婪算法的路径规划方法,该规划方法具体步骤如下:
4、s1、收集地理数据并构建路径规划所需的图结构;
5、s2、通过贪婪算法生成初始路径并优化该初始路径;
6、s3、对路径中的关键节点进行识别标记;
7、s4、对路径进行细化并预测路径中的动态变化;
8、s5、在模拟环境中对规划路径评估修正;
9、s6、实时监控环境变化并根据实时反馈对路径进行微调。
10、作为本发明的进一步方案,s1中所述路径规划图结构具体构建具体步骤如下:
11、步骤一:对收集到的原始数据进行噪声过滤,去除错误数据和无效数据,再使用插值方法填补缺失的gps数据,并通过历史数据修正异常的交通流量数据;
12、步骤二:将来自不同传感器和数据源的数据进行整合,统一格式并去重,将不同来源的数据进行时间同步后,从各组地理数据中识别出道路网络中的节点,节点代表路口、终点以及起点,依据图论中的节点定义,将这些点标记为图结构中的节点;
13、步骤三:根据道路网络数据生成节点之间的边,边代表道路或路径,记录每条边对应的属性信息,基于距离、时间以及交通流量计算每条边的权重,再为每个节点添加属性信息;
14、步骤四:将构建好的图结构存储到数据库或内存中,并将节点和边的信息录入到路径规划系统中,对存储的图结构进行一致性检查,并处理其中的孤立节点或无效边,验证生成的图结构中的路径可达性,再定期获取最新的交通信息,并更新图结构中的边权重,根据实时获取的环境信息,动态调整图结构中的节点和边信息。
15、作为本发明的进一步方案,s2中所述初始路径生成具体步骤如下:
16、步骤1:收集用户设定的起点s以及终点信息g,从起点s开始,并记作ncurrent=s,依据图结构找到当前节点ncurrent的所有邻居节点,记作nneighbors,之后计算每个邻居节点的启发值;
17、步骤2:从所有邻居节点中选择启发值最小的节点作为下一个节点,再将当前节点更新为选择的最优邻居节点,之后将当前节点添加到路径列表中,若当前节点为终点g,则路径生成完成,否则,重复寻找最优邻居节点,直至当前节点为终点g。
18、作为本发明的进一步方案,步骤1中所述启发值具体计算公式如下:
19、
20、式中,(xn,yn)代表节点n的坐标;(xg,yg)代表终点g的坐标;
21、步骤2中所述最优节点选择具体计算公式如下:
22、
23、式中,nneighbors代表当前节点的所有邻居节点集合;h(ni)代表邻居节点ni的启发值。
24、作为本发明的进一步方案,s2中所述初始路径优化具体步骤如下:
25、步骤ⅰ:初始化同时参与路径优化的蚂蚁数量以及挥发系数,之后初始化所有边上的信息素,再将每只蚂蚁放置在起点s,之后每只蚂蚁根据概率选择下一个节点;
26、步骤ⅱ:蚂蚁从起点开始,逐步选择下一个节点,直到到达终点,当每只蚂蚁完成路径后,计算路径的总长度,并将所有边上的信息素浓度按照挥发系数进行挥发;
27、步骤ⅲ:每只蚂蚁沿其路径释放信息素,以增强对应路径的信息素,并更新所有边上的信息素浓度,判断是否达到预设的时间限制,在达到终止条件后,输出在所有迭代中找到的最优路径及其长度。
28、作为本发明的进一步方案,步骤ⅰ中所述概率选择具体计算公式如下:
29、
30、式中,τij代表边(i,j)上的信息素浓度;ηij代表边(i,j)上的启发因子;α代表信息素的重要性系数;β代表启发因子的重要性系数;allowed代表蚂蚁可以选择的节点集合;
31、步骤ⅱ中所述路径总长度具体计算公式如下:
32、
33、式中,lk代表蚂蚁k的路径总长度;dij代表边(i,j)的实际距离;
34、步骤ⅱ中所述信息素浓度挥发具体计算公式如下:
35、τij=(1-ρ)τij
36、式中,ρ代表信息素挥发系数;
37、步骤ⅲ中所述信息素浓度更新具体计算公式如下:
38、
39、
40、式中,代表蚂蚁k在边(i,j)上释放的信息素量;q代表信息素增强系数;m代表蚂蚁数量。
41、作为本发明的进一步方案,s4中所述路径动态变化预测具体步骤如下:
42、步骤①:收集并预处理历史交通数据、环境数据以及地理数据,再对数据进行标准化或归一化处理,将时间序列数据按时间顺序排列,构建输入序列,并基于深度学习框架构建动态预测模型;
43、步骤②:将处理后的数据划分为训练集以及验证集,将训练集数据划分多组小批量数据传入动态预测模型,动态预测模型通过前向传播计算模型输出和损失,并将计算出的损失从动态预测模型输出层开始,进行反向传播,计算损失对模型各网络层的梯度,并通过adam优化器更新参数;
44、步骤③:每次训练周期结束后,在验证集上评估模型性能,调整超参数,当动态预测模型性能不再提升或开始恶化时,提前终止训练,否则,通过训练集以及验证集反复对模型进行训练验证,直至达到预设训练次数后停止;
45、步骤④:将待预测的时间序列数据输入动态预测模型中,并输出路径动态变化,若预测到任一路段将出现拥堵,可以选择替代路径,若预测到任一路段将畅通,可以优先选择该路段,将调整后的路径信息录入系统,更新路径规划图结构。
46、作为本发明的进一步方案,s5中所述路径评估修正具体步骤如下:
47、第一步:依据动态预测结果,从起点开始构建搜索树,以当前节点为根节点,并将图结构中的各组节点作为子节点加入搜索树中,并记录各节点访问次数、价值评估以及探索优先值;
48、第二步:从根节点开始,根据探索优先值选择一个未完全扩展的节点,对选定的节点进行扩展,生成其未访问的子节点,采用随机模拟或启发式算法进行路径模拟,并评估模拟结果;
49、第三步:将模拟评估结果回溯到根节点,更新节点的访问次数和价值评估,更新父节点的探索优先值,重复进行选择、模拟以及回溯,直到达到预设搜索时间或迭代次数的限制;
50、第四步:根据节点的访问次数和价值评估,选择路径中访问次数最多的节点作为最优节点,并将从根节点到最优节点的路径作为最优路径,根据最优路径修正初始路径,将原有路径中与最优路径不同的部分进行修正,输出修正后的最优路径,作为最终的路径规划结果。
51、相比于现有技术,本发明的有益效果在于:
52、1、该基于贪婪算法的路径规划方法收集用户设定的起点以及终点信息,从起点开始,依据图结构找到当前节点的所有邻居节点,之后计算每个邻居节点的启发值,从所有邻居节点中选择启发值最小的节点作为下一个节点,再将当前节点更新为选择的最优邻居节点,之后将当前节点添加到路径列表中,若当前节点为终点,则路径生成完成,否则,重复寻找最优邻居节点,直至当前节点为终点,初始化同时参与路径优化的蚂蚁数量以及挥发系数,之后初始化所有边上的信息素,再将每只蚂蚁放置在起点,蚂蚁从起点开始,根据各节点选择概率逐步选择下一个节点,直到到达终点,当每只蚂蚁完成路径后,计算路径的总长度,并将所有边上的信息素浓度按照挥发系数进行挥发,每只蚂蚁沿其路径释放信息素,以增强对应路径的信息素,并更新所有边上的信息素浓度,判断是否达到预设的时间限制,在达到终止条件后,输出在所有迭代中找到的最优路径及其长度,能够更全面地搜索整个路径空间,使得路径的选择更加智能化和适应性更强,能够更好地应对实时交通状况的变化,提高找到最优路径的机会。
53、2、该基于贪婪算法的路径规划方法收集并预处理历史数据,之后构建动态预测模型,通过历史数据训练并验证动态预测模型,并通过动态预测模型,依据动态预测模型预测路径动态变化,从起点开始构建搜索树,以当前节点为根节点,并将图结构中的各组节点作为子节点加入搜索树中,并记录各节点访问次数、价值评估以及探索优先值,从根节点开始,根据探索优先值选择一个未完全扩展的节点,对选定的节点进行扩展,生成其未访问的子节点,采用随机模拟或启发式算法进行路径模拟,并评估模拟结果,将模拟评估结果回溯到根节点,更新节点的访问次数和价值评估,更新父节点的探索优先值,重复进行选择、模拟以及回溯,直到达到预设搜索时间或迭代次数的限制,根据节点的访问次数和价值评估,选择路径中访问次数最多的节点作为最优节点,并将从根节点到最优节点的路径作为最优路径,根据最优路径修正初始路径,将原有路径中与最优路径不同的部分进行修正,输出修正后的最优路径,作为最终的路径规划结果,能够使路径规划更加贴近实际情况,提高路径规划的准确性和实用性,为用户提供更好的路径导航服务,提高用户的出行体验和路径选择的满意度。
本文地址:https://www.jishuxx.com/zhuanli/20241009/306170.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表