力位混合控制骨骼钻孔方法与流程
- 国知局
- 2024-10-09 15:15:45
本发明涉及手术机器人操作或训练领域,尤其涉及一种力位混合控制骨骼钻孔方法。
背景技术:
1、手术机器人以操作者完全介入的遥控操作或人机直接协作的方式为主。当医生作为操作者介入时,操作者的操作意图对于机器人控制系统是不可知且需要辨识的,操作时的手部运动具有精度低、刚度弱、肌肉抖动、具有无意识力等不足。采用人机协作可以弥补传统操作者的运动不足,提升手术或训练的稳定性、精度、效率。机器人辅助钻孔广泛应用于神经外科、骨科等手术工况或实习训练中,将骨骼钻孔运动精确约束在特定轴线上,操作者仅在轴线方向上控制机器人的进给运动,并间接操作固定在机器人末端的钻孔机构。此时操作者难以通过直接操作钻孔工具的力触觉感知来判断手术/训练情况。
2、此外,如何避免由于操作惯性在钻穿后继续侵入造成的软组织损伤,在钻削控制过程中同时兼具稳定的进给速度和较快的响应时间是噬待解决的问题。
3、因此,有必要研究一种力位混合控制骨骼钻孔方法来解决上述的一个或多个技术问题。
技术实现思路
1、为解决上述至少一个技术问题,根据本发明一方面,提供了一种力位混合控制骨骼钻孔方法,其特征在于包括以下步骤:
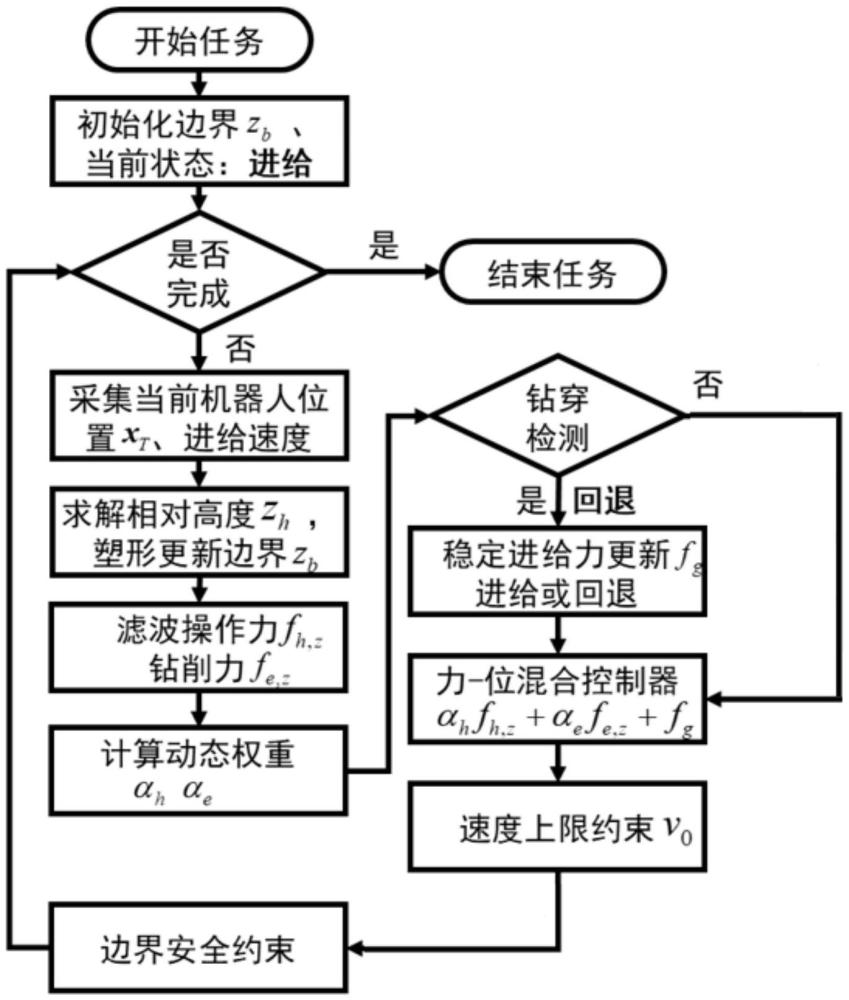
2、s1、开始任务:将ct图像和目标骨骼经过配准,求得目标钻孔位置在机器人坐标系下的位置xp和姿态矩阵mp,其中钻孔方向为mp的z轴方向;
3、s2、初始化:将目标骨骼的最大厚度作为钻削开始时的初始高度边界zb0,机器人的钻头侵入初始高度边界之前减速;然后根据操作者意图进给钻头实施钻削;
4、s3、在判断未钻孔结束的情形下,采集机器人钻头末端位置xt,进而求得进给速度;
5、s4、求解钻头相对高度zh并更新钻孔高度边界zb,zh为距离规划位置的垂直距离;
6、s5、对切削力和操作力进行滤波以表征其平均值特性;
7、s6、计算动态权重αh和αe并给钻头施加稳定进给力,动态权重αh和αe分别表征了操作轴向力fh,z和钻削轴向力fe,z在人机协作钻孔控制器中的权重;
8、s7、钻穿检测和稳定进给力更新:当钻孔高度边界zb距离预设钻削终点预定范围时,控制钻头进给速度为预定慢速恒定进给速度v1,动态监控钻削轴向力fe,z并统计钻削轴向力的最大值max(fe,z),当钻削轴向力快速下降触发尖峰检测,或fe,z下降至统计最大值的预定比例fe,z<cthmax(fe,z),视为钻穿,自动更新稳定进给力方向fg=fg0,引导机器人快速抬起钻头回退;
9、s8、人机协作钻孔控制器的输入包括操作力信号、切削力信号和当前位置信息,构成一个力位混合控制器,将操作力和钻削力投影到钻孔轴线上,得到操作轴向力fh,z和钻削轴向力fe,z,进一步引入人机协作钻孔控制器中施加的稳定进给力fg,控制器在轴线方向上同时兼具阻抗-导纳特性,如:
10、
11、其中左侧mc,bc,kc为控制参数,分别为控制器质量、阻尼和弹性系数,为钻头加速度,为钻头速度,动态权重αh和αe分别表征了操作轴向力fh,z和钻削轴向力fe,z在控制器中的权重,权重αh和αe满足条件αh∈[0,1],αe∈[0,ke],ke表征切削力的放缩系数,由机器人提供助力,ke<1;
12、s9、约束钻头在钻削期间以及回退后重新进入钻削位置期间的速度上限,采用伪塑性的判断规则:
13、
14、其中,为机器人的钻头轴线方向最大运动速度;a0为加速度;zb为钻孔边界,为切削过程中zh的最小值;v0是钻削过程的速度上限;
15、s10、边界安全约束:当钻头偏离预定钻孔位置xp并达到或超过该安全平面高度时,自动触发回退机制,以防止钻头穿透骨骼。
16、根据本发明又一方面,当机器人回退后重新进入待切削位置前提前减速,达到待切削位置时速度为钻削过程的速度上限v0。
17、根据本发明又一方面,操作者在机器人进给途中施加进给操作力,此时机器人加速沿轴线向下运动,直到触发速度上限
18、根据本发明又一方面,操作者在机器人进给途中施加保持操作力,需要施加一个抵抗进给力的向上作用力,当机器人在进给途中,操作者不额外施加操作力时,切削力满足关系fe,z=fg/ke,以恒轴向力向下钻削。
19、根据本发明又一方面,操作者在机器人进给途中施加回退操作力,稳定进给力方向改变,此时机器人快速抬起。
20、根据本发明又一方面,操作者在机器人回退途中施加进给操作力,机器人减速回退或者切换稳定进给力方向改为快速进给。
21、根据本发明又一方面,当机器人判断钻穿,已经尝试抬起时,操作者施加了相反的作用力,由于权重αh的存在,操作者向下的进给力被抑制,机器人将会至少抬起预定高度以供操作者目视观察是否钻穿。
22、根据本发明又一方面,操作者在机器人回退途中施加保持操作力,施加一个抵抗进给力的向下作用力;当机器人判断钻穿时,机器人至少会回退一段距离。
23、本发明可以获得以下一个或多个技术效果:
24、1、将骨骼钻孔运动精确约束在特定轴线上,操作者仅在轴线方向上控制机器人的进给运动,并间接操作固定在机器人末端的钻头,可自动对钻削过程进行判断,并进行自动安全保护,可以作为人机协作式手术机器人的有效安全补充,提升安全性、稳定性,减少医生培训或训练时间。
25、2、可以精确控制骨骼去除过程中的力和进给速度,拥有高感知精度和快反应速度,经过信号处理分析,可以显著提升对骨骼去除过程的感知能力,作为对医生经验的有益补充。对钻孔深度进行自动保护,可以有效避免由于操作惯性在钻穿后继续侵入造成的软组织损伤,在钻削控制过程中同时兼具稳定的进给速度和较快的响应时间。
26、3、可以提高钻孔操作的精确性和适应性,且便于操作者进行人机协作。
27、4、在操作者策略层面引导下顺从于操作者的操作力,提供较高速度的响应速度,同时稳定钻削轴向力,实现人-机器人-环境的稳定力-位混合控制。钻削过程中通过力位混合检测方法,精确检测得到钻穿的发生,并自动将钻头退出。
技术特征:1.一种力位混合控制骨骼钻孔方法,其特征在于包括以下步骤:
2.根据权利要求1所述的力位混合控制骨骼钻孔方法,其特征在于当机器人回退后重新进入待切削位置前提前减速,达到待切削位置时速度为钻削过程的速度上限v0。
3.根据权利要求2所述的力位混合控制骨骼钻孔方法,其特征在于操作者在机器人进给途中施加进给操作力,此时机器人加速沿轴线向下运动,直到触发速度上限
4.根据权利要求1-3任一项所述的力位混合控制骨骼钻孔方法,其特征在于操作者在机器人进给途中施加保持操作力,需要施加一个抵抗进给力的向上作用力,当机器人在进给途中,操作者不额外施加操作力时,切削力满足关系fe,z=fg/ke,以恒轴向力向下钻削。
5.根据权利要求4所述的力位混合控制骨骼钻孔方法,其特征在于操作者在机器人进给途中施加回退操作力,稳定进给力方向改变,此时机器人快速抬起。
6.根据权利要求4所述的力位混合控制骨骼钻孔方法,其特征在于操作者在机器人回退途中施加进给操作力,机器人减速回退或者切换稳定进给力方向改为快速进给。
7.根据权利要求6所述的力位混合控制骨骼钻孔方法,其特征在于当机器人判断钻穿,已经尝试抬起时,操作者施加了相反的作用力,由于权重αh的存在,操作者向下的进给力被抑制,机器人将会至少抬起预定高度以供操作者目视观察是否钻穿。
8.根据权利要求7所述的力位混合控制骨骼钻孔方法,其特征在于操作者在机器人回退途中施加保持操作力,施加一个抵抗进给力的向下作用力;当机器人判断钻穿时,机器人至少会回退一段距离。
技术总结提供了一种力位混合控制骨骼钻孔方法,包括:S1、开始任务;S2、初始化;S3、在判断未钻孔结束的情形下,采集机器人钻头末端位置xT,进而求得进给速度;S4、求解钻头相对高度zh并更新钻孔高度边界;S5、对切削力和操作力进行滤波;S6、计算动态权重和并给钻头施加稳定进给力,动态权重和分别表征了操作轴向力和钻削轴向力在人机协作钻孔控制器中的权重;S7、钻穿检测和稳定进给力更新;S8、将操作力和钻削力投影到钻孔轴线上,得到操作轴向力和钻削轴向力,进一步引入人机协作钻孔控制器中施加的稳定进给力;S9、约束钻头在钻削期间以及回退后重新进入钻削位置期间的速度上限;S10、边界安全约束。技术研发人员:马晓东,吴丹,任昊,崔萌,任文庆,李智超受保护的技术使用者:中国人民解放军总医院第一医学中心技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/308126.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种抑制打鼾的口腔装置
下一篇
返回列表