一种踝关节训练装置的校准系统及其校准方法与流程
- 国知局
- 2024-10-09 15:12:00
本发明涉及一种校准系统及其方法,特别涉及一种踝关节训练装置的校准系统及其校准方法,属于康复设备领域。
背景技术:
1、在现代医疗康复领域,踝关节损伤后的康复训练中,精确的活动范围控制至关重要,这对恢复功能恢复、减少再次受伤风险、增强肌肉力量和灵活性有着决定性影响。然而,传统训练设备大多依赖手动调节,缺乏实时反馈机制和自动定位精度,难以适应个体差异,限制了训练效果。
2、申请号为 201720147727 .1公开了一种 踝关节训练装置,图7 是 踝关节训练装置的立体结构示意图、图8 是 踝关节训练装置的侧面结构示意图、图9铜套件与叉形支架的配合图,踝关节训练装置包括底座1、设置在底座21上的驱动装置23、传动装置、脚托、传动转盘22,所述传动转盘22直接或间接连接在驱动装置23的输出上,传动转盘22径向上设置有滑轨24,滑轨24上配合设置有可在滑轨24上滑动的滑块25,滑轨24与滑块25之间设置有定位锁紧装置,所述滑块25与球头万向节活动端连接,球头万向节固定端连接在调节板46上,调节板46上设置有调节导杆45,调节导杆45与脚托前后方向滑动连接,所述脚托包括一个矩形框架26和置脚板27,调节导杆45滑动连接在矩形框架26上,置脚板27位于框架主体26下方,置脚板7前方通过前竖直连杆44与矩形框架26连接,置脚板后端通过后竖直连杆43与矩形框架26连接,所述前竖直连杆44及后竖直连杆43与矩形框架26均为转动连接,所述矩形框架26位于一个叉形支架28两个叉臂之间,所述叉形支架28两个叉臂朝上,矩形框架26左右两侧与叉形支架28的两个叉臂在竖直方向上分别转动连接,叉形支架根部41与底座21水平方向转动连接,叉形支架28两臂间还固定有铜套支撑杆40,铜套支撑杆40上滑动设置有铜套件30,所述铜套件30包括一个u形钢架38与工字轮铜套39,所述u形钢架38开口向上,工字轮铜套39内轴嵌设在u形钢架38的u形槽内,工字轮铜套39的两个外圆盘与u形钢架38之间为间隙配合,工字轮铜套39的内轴与u形钢钢架38左右两臂为间隙配合,工字轮铜套39的轴向为前后方向,工字轮铜套39可以沿u形钢架38上下滑动,u形钢架38下方穿设在铜套支撑杆40上,可沿铜套支撑杆40左右滑动,在脚托的置脚板下方设置有支架42,所述支架42与矩形框架26后方连接的后竖直连杆43之间固定有导向杆29,所述导向杆29穿设在工字轮铜套39中,导向杆29与工字轮铜套39轴向之间滑动连接。装置左侧设置有腿部托盘34、腿部托盘34高度可利用腿托高度调节把手35调节。在本实施例中,患者治疗时脚放置在置脚板上,脚尖对着圆盘方向,以脚尖的方向为前方,脚跟的方向为后方,当驱动装置带动转盘转动,转盘上设置的滑轨随之转动,脚托前端由球头万向节带动随之做圆周运动,该圆周运动可以分解为脚托前端的上下运动和 左右运动的结合运动,由于脚托与叉形支架之间为转动连接,可以使脚托前端上下运动不受限制,叉形支架的根部与底座之间为转动连接,可以使脚托前端的左右运动不受限制。由于置脚板两端的竖直连杆与矩形框架前后梁为转动连接,铜套件起的作用是通过调整铜套件在铜套支撑杆上的位置,可以很方便的调节置脚板的倾斜角度,针对不同的患者作出针对性治疗。铜套件的u形钢架可以在铜套支撑杆上转动,工字轮铜套内轴嵌设在u形钢架的u形槽内,工字轮铜套的两个外圆盘与u形钢架之间为间隙配合,工字轮铜套的内轴与u形钢架左右两臂为间隙配合,使工字轮铜套可以在u形钢架上上下滑动,这两个结构保证了导向杆前后运动顺滑,避免了导向杆在运动中被卡住。
3、如何能够实现智能校准、精准控制的踝关节训练器,实现个性化训练,满足康复需求是训练设备特别是裸关节装置面临的一大课题。
技术实现思路
1、针对现有设备中大多依赖手动调节,存在着缺乏实时反馈机制和自动定位精度,难以适应个体差异,限制了训练效果等问题,本发明提供一种踝关节训练装置的校准系统及其校准方法,其目的是实现训练过程的自动化和精准控制,增强训练效率和安全性,促进患者恢复。
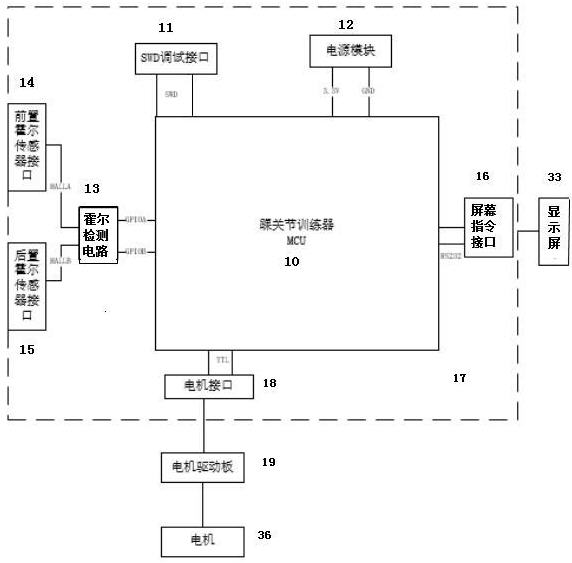
2、本发明的技术方案是:一种踝关节训练装置的校准系统,包括踝关节腿部托盘、传动机构、传动轮盘、阻力调节把手、腿托高度调节把手、电机、设备主体,所述校准系统包括显示屏、主控电路板、主控电路板上设置有mcu,mcu上连接有程序调试的swd调试接口、检测电机位置的霍尔检测电路、用作电机驱动的电机接口、用于软件交互显示屏的屏幕指令接口和电源模块;
3、进一步,所述电机位置信号输入的霍尔检测电路与mcu之间利用gpioa和gpiob相连,的另外一端分别通过hella和hellb连接有前置霍尔传感器接口和后置霍尔传感器接口,前置霍尔传感器接口和后置霍尔传感器接口上分别连接有前置霍尔传感器和后置霍尔传感器,前置霍尔传感器和后置霍尔传感器安装在前置霍尔传感器安装孔和后置霍尔传感器安装孔上,传动转盘上设置有前置霍尔传感器安装孔和后置霍尔传感器安装孔;
4、进一步,所述显示屏的屏幕指令接口一端与mcu串口四之间通过rs232相连,霍尔检测电路的另一端与显示屏相连;
5、进一步,所述电机接口一端通过ttl与mcu的串口三相连,电机接口另一端与电机驱动板相连,电机驱动板上连接有电机。
6、一种踝关节训练装置的校准方法,利用上述一种踝关节训练装置的校准系统,当驱动装置带动转盘旋转时,依次对前置霍尔传感器和后置霍尔传感器的触发状况进行确认,触发后的前置霍尔传感器和后置霍尔传感器分别被主控mcu依次识别出触发信号,从而发出指令控制电机,使电机分别进行逆时针减速转动和停止转动,实现位置校准,具体校准步骤如下:
7、 1)、当设备正式运行前,判断前置霍尔传感器是否能够被触发:
8、a、校准系统控制电机逆时针转动,判断前置霍尔传感器是否触发若触发,由mcu识别触发信号;
9、a1、如果前置霍尔传感器能够被触发,则mcu控制电机开始逆时针减速运动;
10、a2、如果前置霍尔传感器未能触发,校准系统控制再次进行电机逆时针转动,再次进行前置霍尔传感器是否触发的判断;
11、a3、再次失败后,进行系统检查;
12、2)、当设备正式运行前,判断后置霍尔传感器是否能够被触发:
13、b、当电机向逆时针方向减速转动时,判断后置霍尔传感器是否被触发,由mcu识别触发信号;
14、b1、如果后置霍尔传感器能够被触发,则mcu控制电机立即停止运动;
15、b2、如果后置霍尔传感器未能触发,校准系统控制再次进行电机逆时针方向的减速转动,重新进行后置霍尔传感器是否触发若触发的判断;
16、b3、再次失败后,进行系统检查。
17、 本发明具有的积极效果是:通过在mcu上连接程序调试的swd调试接口,可对程序进行调试;通过在mcu上霍尔传感器电路,可分别连接前置霍尔传感器接口和后置霍尔传感器接口,进一步在前置霍尔传感器接口和后置霍尔传感器接口上分别连接前置霍尔传感器和后置霍尔传感器接口,可将检测信号先后反馈至mcu,再由mcu控制电机的转向和转速,从而可进行电机的转动位置,进行校准;通过在mcu上连接显示屏的屏幕指令接口,并在屏幕指令接口上连接显示屏,可通过显示屏可显示界面内容、选择或调节参数、指令输入、运行相关程序,通过设置电源模块,可向mcu和相关的电路板供电,保证系统的运行,本发明的一种踝关节训练装置的校准系统及其方法可显著提升康复训练的精确度和效率, 具有如下效果:
18、1. 智能化控制:通过集成的mcu与软件控制板、霍尔传感器等部件,实现了自动化校准,使得设备在训练过程中能实时反馈和调节,提高训练精度,适应个体差异性;
19、2. 精确位置校准: 霍尔自动校准功能,结合霍尔传感器的触发,确保每次训练前位置准确,保障了训练起点一致,避免了重复性误差;
20、3. 安全与自适应性:霍动减速、停止机制,霍尔传感器监控运动状态,预防过度训练,确保了运动过程的安全性,保护了患者免受伤害;
21、4. 综合康复效益:提供个性化训练:智能化校准系统,结合软件界面交互,训练师和患者可依据康复计划调整训练强度、进度,达到最佳效果,加速康复进程。综上,本发明极大提高了踝关节训练的智能化和个性化水平,不仅促进了康复进程,确保了训练的有效性,也增强了安全性,为康复医学和患者带来了实质性的康复训练提供了先进工具。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308032.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表