一种小型轻量化双轴一体太阳翼驱动机构的制作方法
- 国知局
- 2024-10-09 15:11:54
本发明属于太阳翼驱动,具体涉及一种小型轻量化双轴一体太阳翼驱动机构。
背景技术:
1、在太阳翼系统中,为了最大效率地接收太阳光,通常会配置sadm,即太阳翼驱动机构,太阳翼一般设置两个对日定向自由度,通过两个相互垂直方向的运动,实现太阳翼最大发电效率。
2、随着卫星堆叠的布局要求,太阳翼双翼展开面积40平米,展开长度14米,整体收拢高度仅有150mm。因此,对太阳翼驱动机构的体积要求高。参照图1,现有sadm一般采用两轴分体的方式实现二维转动自由度,分体的sadm结构离散、体积大、重量重,无法满足堆叠卫星的布局要求。两轴分体式sadm的a轴和b轴上的输入轴系8、输出轴系9、减速机构10、驱动电机11、导电滑环12和电位计13均沿各自轴向排布,导致轴向尺寸较大,并且单轴上重量近2kg(不含滑环),轴向尺寸接近200mm,难以满足卫星堆叠的布局要求。
3、另外,我国将大力发展商业航天,以市场主导,具有商业盈利模式的航天活动是未来的航天领域的关键,商业、盈利、成本控制成为商业航天的关键词。未来卫星发射数量是以万为单位计量,面对如此庞大的数量,发射成本、制造成本和运维成本等各个环节的成本控制是商业航天构建下一代互联网、物联网智能世界的重点。
技术实现思路
1、本发明的目的在于克服现有sadm整体重量重、成本高,并且轴向尺寸大,不能满足卫星堆叠布局要求的不足之处,而提供了一种小型轻量化双轴一体太阳翼驱动机构。
2、为实现上述目的,本发明所提供的技术解决方案是:
3、一种小型轻量化双轴一体太阳翼驱动机构,其特殊之处在于,包括壳体、第一电机、第一传动组件、第二电机和第二传动组件;
4、所述第一电机和第二电机同轴设置在壳体相对的两侧壁外;
5、所述第一传动组件垂直于第一电机,第一电机用于驱动第一传动组件绕自身轴线旋转;
6、所述第二传动组件垂直于所述第一传动组件设置;
7、所述第二电机用于驱动第二传动组件旋转,并带动第一传动组件绕第二传动组件轴线转动,转动角度范围为±180°;所述第二传动组件的转动范围为±170°。
8、进一步地,所述第一传动组件包括与第一电机输出轴同轴连接的第一小锥齿轮、以及沿垂直于第一小锥齿轮轴向依次设置的第一太阳帆板连接法兰、第一谐波减速器、第一大锥齿轮、第一传动轴和第二太阳帆板连接法兰;
9、所述第一小锥齿轮与第一大锥齿轮啮合传动;
10、所述第二大锥齿轮与第一谐波减速器的波发生器连接,带动波发生器运转;第一谐波减速器的钢轮与壳体固连,第一谐波减速器的柔轮与所述第一太阳帆板连接法兰沿轴向固定,所述第一谐波减速器通过柔轮传输扭矩给第一太阳帆板连接法兰;
11、所述第一传动轴两端分别与第一太阳帆板连接法兰和第二太阳帆板连接法兰同轴固连。
12、进一步地,所述第一大锥齿轮背离其上锥齿的一端外壁通过第一轴承组件与壳体内壁连接;
13、所述第一传动轴两端且位于壳体外侧对称固设有第二轴承组件,第一太阳帆板连接法兰和第二太阳帆板连接法兰分别通过第二轴承组件的轴承与第二轴承组件的轴承座连接。
14、进一步地,所述第一传动轴背离所述第一谐波减速器的一端轴体上设有第一角度传感器,用于采集所述第一传动轴的角度信息;
15、所述第一角度传感器位于第二轴承组件的轴承座内。
16、进一步地,所述第二传动组件包括与第二电机输出轴同轴连接的第二小锥齿轮、以及沿垂直于第二小锥齿轮轴向依次设置的第二大锥齿轮、第二谐波减速器、第二传动轴和星体连接法兰;
17、所述第二小锥齿轮与第二大锥齿轮啮合传动;
18、所述第二大锥齿轮与第二谐波减速器的波发生器连接,带动波发生器运转;第二谐波减速器的钢轮与壳体固定连接,所述第二谐波减速器通过钢轮输出扭矩传递给壳体及与壳体连接的第一传动组件;
19、所述第二传动轴一端与所述第二大锥齿轮同轴固定,且第二传动轴本体通过轴承与第二谐波减速器中心孔连接;第二传动轴另一端与星体连接法兰固定连接;
20、所述第二谐波减速器的柔轮与所述第二传动轴轴体固定连接。
21、进一步地,所述第二传动轴为三阶轴状,小段和中段伸入所述第二谐波减速器中心孔内,小段端部与第二大锥齿轮同轴固定,小段外壁通过轴承与第二谐波减速器的波发生器配合连接;中段外壁与第二谐波减速器的柔轮配合,且柔轮与大段台阶面轴向固连。
22、进一步地,所述壳体外设有一与第二传动轴同轴的第三轴承组件,所述第三轴承组件的轴承座与壳体固定,第二传动轴大段外壁与轴承座之间通过轴承连接。
23、进一步地,所述第一电机的输出轴与第一小锥齿轮中心孔过盈配合连接,第一小锥齿轮远离其上锥齿的一端轴体通过一第四轴承组件与壳体内壁连接;
24、所述第二电机的输出轴与第二小锥齿轮中心孔过盈配合连接,第二小锥齿轮远离其上锥齿的一端轴体通过另一第四轴承组件与壳体内壁连接。
25、进一步地,还包括第二传感器,所述第二传感器为霍尔传感器,用于采集所述第一传动组件相对于所述第二传动组件的转动角度;
26、所述霍尔传感器的霍尔元件安装在星体连接法兰上,霍尔传感器的磁钢安装在壳体上;
27、所述第一角度传感器为电位计。
28、进一步地,所述第一电机和所述第二电机采用步进电机。
29、本发明的优点是:
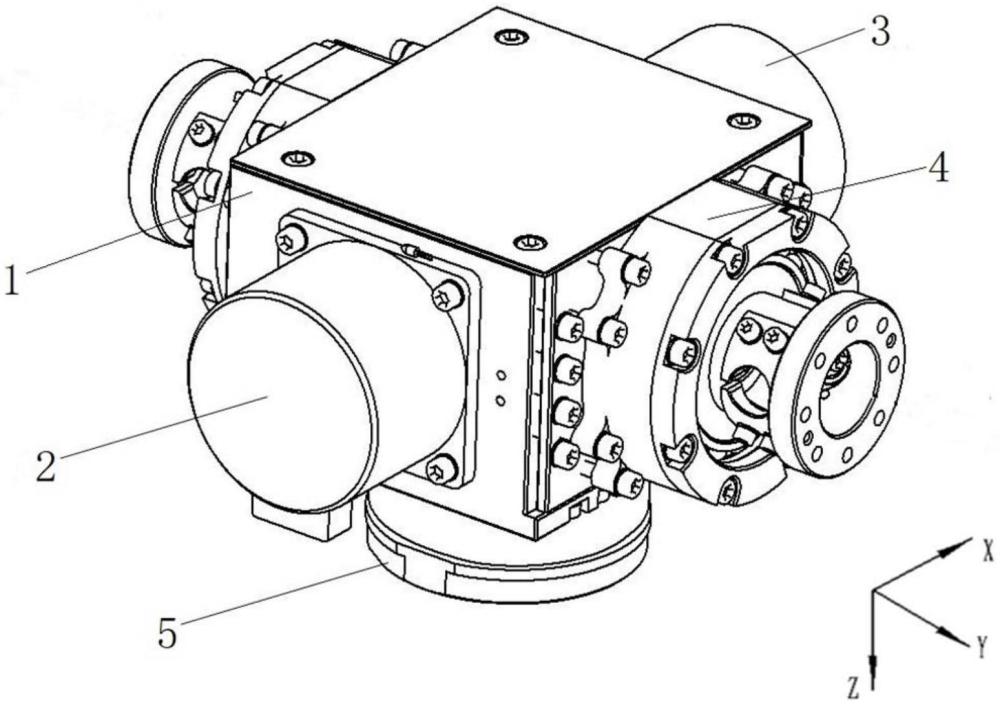
30、本发明本发明根据卫星堆叠布局的y向和z向的布局要求,将两个驱动电机与第一传动组件、第一传动组件与第二传动组件均按照90°布局方式布置,其中第一传动组件沿y轴设置,第二传动组件沿z轴正向设置,第一电机和第二电机沿x轴且同轴设置。通过两套驱动组件的集成设计实现双翼二维对日定向功能的同时,使得sadm在y方向压缩至175mm,z方向的尺寸为95mm,x方向的尺寸为172mm;相比于现有sadm结构,本发明尺寸大大减小。
31、现有分体式samd重量为8kg,单轴成本约50万,四轴200万;而本发明驱动机构重量仅为3kg,成本小于100万,满足卫星堆叠的布局要求,并且为未来商业卫星提供了发展方向。
技术特征:1.一种小型轻量化双轴一体太阳翼驱动机构,其特征在于,包括壳体、第一电机、第一传动组件、第二电机和第二传动组件;
2.根据权利要求1所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述第一传动组件包括与第一电机输出轴同轴连接的第一小锥齿轮、以及沿垂直于第一小锥齿轮轴向依次设置的第一太阳帆板连接法兰、第一谐波减速器、第一大锥齿轮、第一传动轴和第二太阳帆板连接法兰;
3.根据权利要求2所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述第一大锥齿轮背离其上锥齿的一端外壁通过第一轴承组件与壳体内壁连接;
4.根据权利要求3所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述第一传动轴背离所述第一谐波减速器的一端轴体上设有第一角度传感器,用于采集所述第一传动轴的角度信息;
5.根据权利要求4所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述第二传动组件包括与第二电机输出轴同轴连接的第二小锥齿轮、以及沿垂直于第二小锥齿轮轴向依次设置的第二大锥齿轮、第二谐波减速器、第二传动轴和星体连接法兰;
6.根据权利要求5所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述第二传动轴为三阶轴状,小段和中段伸入所述第二谐波减速器中心孔内,小段端部与第二大锥齿轮同轴固定,小段外壁通过轴承与第二谐波减速器的波发生器配合连接;中段外壁与第二谐波减速器的柔轮配合,且柔轮与大段台阶面轴向固连。
7.根据权利要求6所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述壳体外设有一与第二传动轴同轴的第三轴承组件,所述第三轴承组件的轴承座与壳体固定,第二传动轴大段外壁与轴承座之间通过轴承连接。
8.根据权利要求7所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,
9.根据权利要求8所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,还包括第二传感器,所述第二传感器为霍尔传感器,用于采集所述第一传动组件相对于所述第二传动组件的转动角度;
10.根据权利要求1-9任一所述小型轻量化双轴一体太阳翼驱动机构,其特征在于,所述第一电机和所述第二电机采用步进电机。
技术总结本发明提供了一种小型轻量化双轴一体太阳翼驱动机构,包括壳体、第一电机、第一传动组件、第二电机和第二传动组件;第一电机和第二电机同轴设置在壳体相对的两侧壁外;第一传动组件垂直于第一电机,第一电机用于驱动第一传动组件绕自身轴线旋转;第二传动组件垂直于所述第一传动组件设置,第二电机能够通过驱动第二传动组件旋转,并带动第一传动组件绕第二传动组件轴线转动,转动角度范围为±180°。本发明相比于现有SADM结构紧凑、尺寸小、重量轻且成本低,满足卫星堆叠布局要求,并为未来商业卫星研究提供了发展方向。技术研发人员:雷静,万人民,陈宇鹏,周江,刘晨,杨永涛,颜炜受保护的技术使用者:中国电子科技集团公司第三十九研究所技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/308024.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表