一种安装于执行器内部的电磁定位装置的校正方法及系统与流程
- 国知局
- 2024-10-09 15:19:09
本发明涉及定位装置校正的,尤其涉及一种安装于执行器内部的电磁定位装置的校正方法及系统。
背景技术:
1、在现代医学中,微创手术因其创伤小、恢复快的优点,逐渐成为外科手术的主流。然而,微创手术的操作空间狭小,对手术器械的精确定位和操作提出了极高的要求。电磁导航技术作为一种先进的定位技术,能够在不受视线限制的情况下,实现对手术器械的精确跟踪。该技术通过电磁传感器,生成电磁场,并利用计算机系统实时计算传感器的位置和姿态,从而为外科医生提供准确的手术导航。结合电磁导航技术的手术导航机器人产品在近年来迅速发展,通过将电磁导航与机器人技术融合,进一步提升了手术的精确性和稳定性。这些产品不仅提高了手术的成功率,还显著减少了患者的术后恢复时间和并发症风险。
2、在当下结合电磁导航的手术导航机器人产品中,在机械臂末端会固定用于穿刺针进针的辅助设备,其设备内部会安装一个电磁定位装置,现有技术中一般通过硬件图纸来确定其相对于进针孔径中心点的位置,以此来达到进针孔径位置与手术计划的体外进针点一致。但是由于电磁定位装置往往安装于辅助设备内部,无法用设备进行测量其安装的准确性,并且安装的过程由人为操作,往往容易出现偏差,对设备最终的精度影响较大。
3、目前市面上解决此问题的方案:
4、(1)可以将电磁导航设备转换为光学导航设备,其优点是光学的跟踪精度相较于电磁会更高一些,但是由于光学导航设备的标记球相较于电磁传感器的定位线圈,其大小和重量都比定位线圈大出不少,并且其无法安装于辅助设备内部,需要安装于辅助设备前端,对于设备的美观度上有些损失,并且由于光学跟踪的特殊性,在标记球与光学导航设备之间不能有物体遮挡,降低手术的便捷性。
5、(2)将穿刺针针尖部分放入一块传感器,其功能能够代替电磁定位装置对于进针孔径中心点位置的跟踪,其优点能够提高设备整体的精度,但是针头部分往往会出现高温或者超低温的情况,对其内部的电磁定位装置具有不可逆的破坏作用,无法重复使用针头内部的传感器,特别是对于多针的手术,其手术成本会有较大的提高。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种安装于执行器内部的电磁定位装置的校正方法及系统,解决因辅助进针设备内部的电磁定位装置误差导致最终的进针孔径中心点的位置信息跟踪信息有误,最终使得系统精度下降的问题。
2、本发明的上述发明目的是通过以下技术方案得以实现的:
3、一种安装于执行器内部的电磁定位装置的校正方法,包括以下步骤:
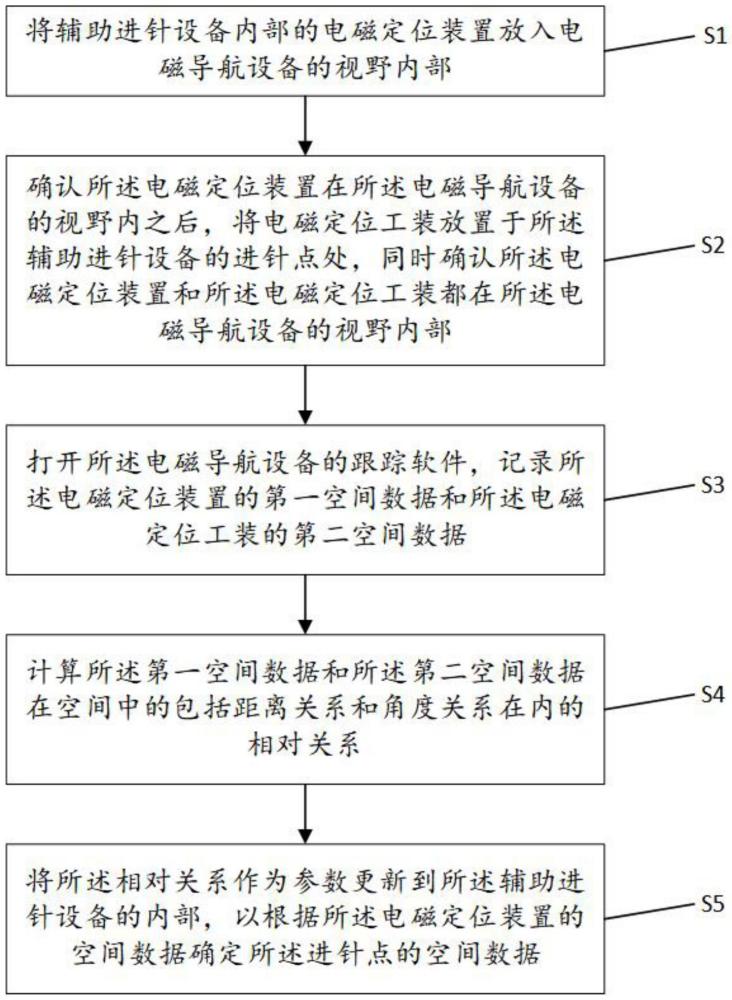
4、s1:将辅助进针设备内部的电磁定位装置放入电磁导航设备的视野内部;
5、s2:确认所述电磁定位装置在所述电磁导航设备的视野内之后,将电磁定位工装放置于所述辅助进针设备的进针点处,同时确认所述电磁定位装置和所述电磁定位工装都在所述电磁导航设备的视野内部;
6、s3:打开所述电磁导航设备的跟踪软件,记录所述电磁定位装置的第一空间数据和所述电磁定位工装的第二空间数据;
7、s4:计算所述第一空间数据和所述第二空间数据在空间中的包括距离关系和角度关系在内的相对关系;
8、s5:将所述相对关系作为参数更新到所述辅助进针设备的内部,以根据所述电磁定位装置的空间数据确定所述进针点的空间数据。
9、进一步地,在步骤s3中,打开所述电磁导航设备的跟踪软件,记录所述电磁定位装置的所述第一空间数据和所述电磁定位工装的所述第二空间数据,具体为:
10、记录包括所述电磁定位装置的所述第一空间数据和所述电磁定位工装的所述第二空间数据在内的跟踪数据,所述第一空间数据和所述第二空间数据的数据格式为:
11、pos=[q0,qx,qy,qz,tx,ty,tz]
12、其中,[q0,qx,qy,qz]为四元数,表示所述电磁定位装置和所述电磁定位工装中的电磁传感器相较于世界坐标系的姿态,[tx,ty,tz]为空间坐标数据,表示所述电磁定位装置和所述电磁定位工装中的电磁传感器相较于所述世界坐标系的空间坐标数据;
13、所述电磁定位装置中的所述第一空间数据记录为posnav,所述电磁定位工装中的所述第二空间数据记录为postip。
14、进一步地,安装于执行器内部的电磁定位装置的校正方法,还包括:分别对所述第一空间数据和所述第二空间数据中的所述四元数进行归一化操作,具体为:
15、分别计算所述第一空间数据和所述第二空间数据的向量模
16、通过所述向量模采用以下公式对所述第一空间数据和所述第二空间数据中所述四元数进行归一化处理:
17、q0=q0/normq
18、qx=qx/normq
19、qy=qy/normq
20、qz=qz/normq。
21、进一步地,安装于执行器内部的电磁定位装置的校正方法,还包括:通过归一化后的所述第一空间数据和所述第二空间数据中的所述四元数建立分别建立所述电磁定位装置和所述电磁定位工装的旋转矩阵,具体为:
22、
23、由以上公式计算出的所述电磁定位装置的所述旋转矩阵为rotmatnav,所述电磁定位工装的所述旋转矩阵为rotmattip。
24、进一步地,在步骤s4中,计算所述第一空间数据和所述第二空间数据在空间中的所述距离关系,具体为:
25、将所述第一空间数据posnav和所述第二空间数据postip中的所述空间坐标数据分别乘以所述电磁定位装置的所述旋转矩阵rotmatnav,将所述电磁定位装置和所述电磁定位工装中的所述空间坐标数据从所述世界坐标系转换到所述电磁定位设备中的电磁传感器坐标系中,计算如下:
26、
27、其中,为所述世界坐标系下所述第一空间数据posnav中的所述空间坐标数据,为所述世界坐标系下所述第二空间数据postip中的所述空间坐标数据,为所述电磁传感器坐标系下所述第一空间数据pos'nav中的所述空间坐标数据,为所述电磁传感器坐标系下所述第二空间数据pos'tip中的所述空间坐标数据;
28、将获取的所述第二空间数据pos'tip中的所述空间坐标数据减去所述第一空间数据pos'nav中的所述空间坐标数据,得到所述第二空间数据相较于所述第一空间数据的空间距离关系,具体为:
29、
30、所述第二空间数据相较于所述第一空间数据的空间距离关系也即所述进针点相对于所述电磁定位装置中的电磁传感器的空间距离关系。
31、进一步地,在步骤s4中,计算所述第一空间数据和所述第二空间数据在空间中的所述角度关系,具体为:
32、将所述电磁定位工装的所述旋转矩阵为rotmattip乘以所述电磁定位装置的所述旋转矩阵为rotmatnav,以此来得到所述第一空间数据和所述第二空间数据在空间中的所述角度关系,公式如下:
33、rotmatres=rotmattip*rotmatnav
34、所述第一空间数据和所述第二空间数据在空间中的所述角度关系也即所述进针点的穿刺针进针方向相较于所述电磁定位装置中的电磁传感器的相对方向。
35、进一步地,安装于执行器内部的电磁定位装置的校正方法,还包括:计算所述电磁定位设备中的所述电磁传感器坐标系下的所述穿刺针进针方向的单位向量,以及所述电磁定位设备中的电磁传感器与所述穿刺针进针方向的夹角,具体为:
36、所述穿刺针进针方向一般为z轴,所以将z轴的单位向量乘以所述第一空间数据和所述第二空间数据在空间中的所述角度关系rotmatres得到所述电磁定位设备中的所述电磁传感器坐标系下的所述穿刺针进针方向的所述单位向量needletip,计算公式如下:
37、needletip=[0,0,1]*rotmatres
38、计算z轴方向的单位向量zvector与所述单位向量needletip之间的夹角,结果为所述电磁定位设备中的电磁传感器与所述穿刺针进针方向的夹角,公式为:
39、angle=(needletip*zvector)/(norm(needletip)*norm(zvector)
40、其中,angle为所述电磁定位设备中的电磁传感器与所述穿刺针进针方向的夹角,norm为计算单位向量zvector与所述单位向量needletip模的表示。
41、一种用于执行如上述的安装于执行器内部的电磁定位装置的校正方法的安装于执行器内部的电磁定位装置的校正系统,包括:
42、电磁定位装置放置模块,用于将辅助进针设备内部的电磁定位装置放入电磁导航设备的视野内部;
43、电磁定位工装放置模块,用于确认所述电磁定位装置在所述电磁导航设备的视野内之后,将电磁定位工装放置于所述辅助进针设备的进针点处,同时确认所述电磁定位装置和所述电磁定位工装都在所述电磁导航设备的视野内部;
44、空间数据记录模块,用于打开所述电磁导航设备的跟踪软件,记录所述电磁定位装置的第一空间数据和所述电磁定位工装的第二空间数据;
45、相对关系计算模块,用于计算所述第一空间数据和所述第二空间数据在空间中的包括距离关系和角度关系在内的相对关系;
46、参数更新模块,用于将所述相对关系作为参数更新到所述辅助进针设备的内部,以根据所述电磁定位装置的空间数据确定所述进针点的空间数据。
47、一种计算机设备,包括存储器和一个或多个处理器,所述存储器中存储有计算机代码,所述计算机代码被所述一个或多个处理器执行时,使得所述一个或多个处理器执行如上述的方法。
48、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机代码,当所述计算机代码被执行时,如上述的方法被执行。
49、与现有技术相比,本发明的有益效果是:
50、通过提供一种安装于执行器内部的电磁定位装置的校正方法,包括步骤:s1:将辅助进针设备内部的电磁定位装置放入电磁导航设备的视野内部。s2:确认所述电磁定位装置在所述电磁导航设备的视野内之后,将电磁定位工装放置于所述辅助进针设备的进针点处,同时确认所述电磁定位装置和所述电磁定位工装都在所述电磁导航设备的视野内部。s3:打开所述电磁导航设备的跟踪软件,记录所述电磁定位装置的第一空间数据和所述电磁定位工装的第二空间数据。s4:计算所述第一空间数据和所述第二空间数据在空间中的包括距离关系和角度关系在内的相对关系。s5:将所述相对关系作为参数更新到所述辅助进针设备的内部,以根据所述电磁定位装置的空间数据确定所述进针点的空间数据。上述技术方案,解决了由于电磁定位装置往往安装于辅助设备内部,无法用设备进行测量其安装的准确性,并且安装的过程由人为操作,往往容易出现偏差,对设备最终的精度影响较大的技术问题。
本文地址:https://www.jishuxx.com/zhuanli/20241009/308312.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表