双臂机器人的自动导航控制方法、装置、电子设备及介质与流程
- 国知局
- 2024-10-09 15:18:02
本发明涉及双臂机器人导航控制,尤其涉及双臂机器人的自动导航控制方法、装置、电子设备及介质。
背景技术:
1、随着科技的不断进步,工业自动化和智能化已成为当今社会发展的主要趋势,然而在医疗领域,尤其是在手术领域,依然存在着一些挑战,传统手术中,医生的操作受限于人体结构的复杂性和手术空间的局限性,这导致了手术风险的增加以及手术效率的低下。因此,迫切需要寻求一种能够提高手术精准度、降低手术风险并提高手术效率的新型技术。
2、当前的手术机器人技术虽然在一定程度上缓解了手术中医生的操作受限问题,但仍然存在一些不足。
3、传统手术机器人的定位精度和导航能力有限,无法充分适应复杂多变的手术环境。
技术实现思路
1、本发明提供了双臂机器人的自动导航控制方法、装置、电子设备及介质,能够实现双臂机器人的自主导航控制,提高了手术过程中的定位精度和导航能力,从而弥补了现有技术在手术精准度和效率方面的不足。
2、根据本发明的一方面,提供了双臂机器人的自动导航控制方法,该方法包括:
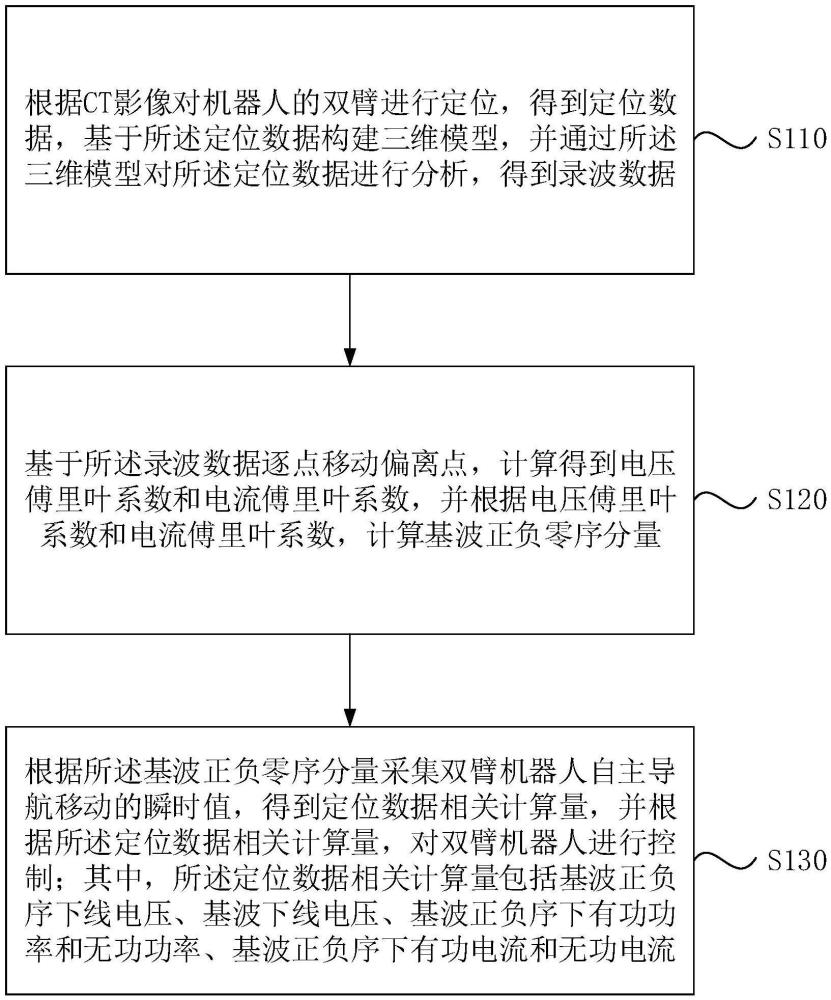
3、根据ct影像对机器人的双臂进行定位,得到定位数据,基于所述定位数据构建三维模型,并通过所述三维模型对所述定位数据进行分析,得到录波数据;
4、基于所述录波数据逐点移动偏离点,计算得到电压傅里叶系数和电流傅里叶系数,并根据电压傅里叶系数和电流傅里叶系数,计算基波正负零序分量;
5、根据所述基波正负零序分量采集双臂机器人自主导航移动的瞬时值,得到定位数据相关计算量,并根据所述定位数据相关计算量,对双臂机器人进行控制;其中,所述定位数据相关计算量包括基波正负序下线电压、基波下线电压、基波正负序下有功功率和无功功率、基波正负序下有功电流和无功电流。
6、根据本发明的另一方面,提供了双臂机器人的自动导航控制装置,该装置包括:
7、定位模块,用于根据ct影像对机器人的双臂进行定位,得到定位数据,基于所述定位数据构建三维模型,并通过所述三维模型对所述定位数据进行分析,得到录波数据;
8、采集模块,用于基于所述录波数据逐点移动偏离点,计算得到电压傅里叶系数和电流傅里叶系数,并根据电压傅里叶系数和电流傅里叶系数,计算基波正负零序分量;
9、控制模块,用于根据所述基波正负零序分量采集双臂机器人自主导航移动的瞬时值,得到定位数据相关计算量,并根据所述定位数据相关计算量,对双臂机器人进行控制;其中,所述定位数据相关计算量包括基波正负序下线电压、基波下线电压、基波正负序下有功功率和无功功率、基波正负序下有功电流和无功电流。
10、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的双臂机器人的自动导航控制方法。
12、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的双臂机器人的自动导航控制方法。
13、本发明实施例的技术方案,通过根据ct影像对机器人的双臂进行定位,得到定位数据,基于定位数据构建三维模型,并通过三维模型对定位数据进行分析,得到录波数据,基于录波数据逐点移动偏离点,计算得到电压傅里叶系数和电流傅里叶系数,并根据电压傅里叶系数和电流傅里叶系数,计算基波正负零序分量,根据基波正负零序分量采集双臂机器人自主导航移动的瞬时值,得到定位数据相关计算量,并根据定位数据相关计算量,对双臂机器人进行控制。本技术方案,能够实现双臂机器人的自主导航控制,提高了手术过程中的定位精度和导航能力,从而弥补了现有技术在手术精准度和效率方面的不足。
14、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.双臂机器人的自动导航控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述定位包括第一定位传感器和第二定位传感器;其中,所述第一定位传感器包括控制第一机械臂的穿刺组件,由体外进行穿刺并到达第一目标位置;所述第二定位传感器包括控制第二机械臂的内窥镜,由腔道到达第二目标位置。
3.根据权利要求2所述的方法,其特征在于,所述构建包括采集定位数据的偏离点、移动速度和移动方向,基于机器人程序采样频率和定位数据的偏离点、移动速度和移动方向对第一定位传感器和第二定位传感器的通道进行校验;
4.根据权利要求3所述的方法,其特征在于,所述对所述定位数据进行分析包括在移动速度和移动方向确定的情况下,基于录波数据逐点移动偏离点,计算得到电压傅里叶系数和电流傅里叶系数;
5.根据权利要求4所述的方法,其特征在于,根据电压傅里叶系数和电流傅里叶系数,计算基波正负零序分量,包括:
6.根据权利要求5所述的方法,其特征在于,所述定位数据相关计算量包括:
7.根据权利要求1所述的方法,其特征在于,根据所述定位数据相关计算量,对双臂机器人进行控制,包括:
8.双臂机器人的自动导航控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的双臂机器人的自动导航控制方法。
技术总结本发明公开了双臂机器人的自动导航控制方法、装置、电子设备及介质。该方法包括根据CT影像对机器人的双臂进行定位,得到定位数据,基于定位数据构建三维模型,并通过三维模型对定位数据进行分析,得到录波数据;基于录波数据逐点移动偏离点,计算得到电压傅里叶系数和电流傅里叶系数,并根据电压傅里叶系数和电流傅里叶系数,计算基波正负零序分量;根据基波正负零序分量采集双臂机器人自主导航移动的瞬时值,得到定位数据相关计算量,并根据定位数据相关计算量,对双臂机器人进行控制。本技术方案,能够实现双臂机器人的自主导航控制,提高了手术过程中的定位精度和导航能力,从而弥补了现有技术在手术精准度和效率方面的不足。技术研发人员:吴添权,肖勇,刘铠滢,詹桦,周景烁,聂德志,丁亮,林跃渠,林凯煌,邱灿树受保护的技术使用者:广东电网有限责任公司技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/308254.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表