一种基于自适应子集模拟的自动驾驶系统安全性验证方法
- 国知局
- 2024-10-09 15:23:08
本发明涉及自动驾驶,尤其是涉及一种基于自适应子集模拟的自动驾驶系统安全性验证方法。
背景技术:
1、自动驾驶系统(autonomous driving systems,ads)集成了高可信传感器、人工智能等尖端技术,旨在减少对驾驶员的依赖,提升交通安全与效率。随着技术的进步,自动驾驶系统逐步从高级驾驶辅助系统(advanced driver assistant systems,adas)向全自动驾驶转变,其安全性测试的需求日益增长。
2、传统的自动驾驶测试方法主要包括受控场地测试、开放道路测试和虚拟仿真测试。受控场地测试在特定环境中进行,虽然能够提供可预测和安全的条件,但存在泛化能力差、运营成本高昂的问题。开放道路测试更接近真实交通环境,但面临法律法规不完善、测试成本高和安全风险等问题。虚拟仿真测试则利用计算机模拟技术重现交通环境,具有可控性、可重复性和成本效益等优点,但同样存在无法完全复现现实世界复杂情况的局限性。
3、即使采用虚拟仿真测试,现有测试方法在面对高维自然驾驶场景时存在显著局限性。现有的方法难以平衡探索极端场景和覆盖测试空间的需求,且未能完全集成先进的测试平台和全栈自动驾驶系统,导致测试结果无法充分反映真实环境。因此,如何提高自动驾驶系统安全性测试的效率和准确性,尤其是在高维场景参数空间中,成为一个亟待解决的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于自适应子集模拟的自动驾驶系统安全性验证方法,以解决现有技术在高维场景参数空间中测试自动驾驶系统的低效率和低准确性问题。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明的一个方面,提供了一种基于自适应子集模拟的自动驾驶系统安全性验证方法,包括如下步骤:
4、步骤s1,通过蒙特卡洛测试,生成n个独立同分布的驾驶场景样本;
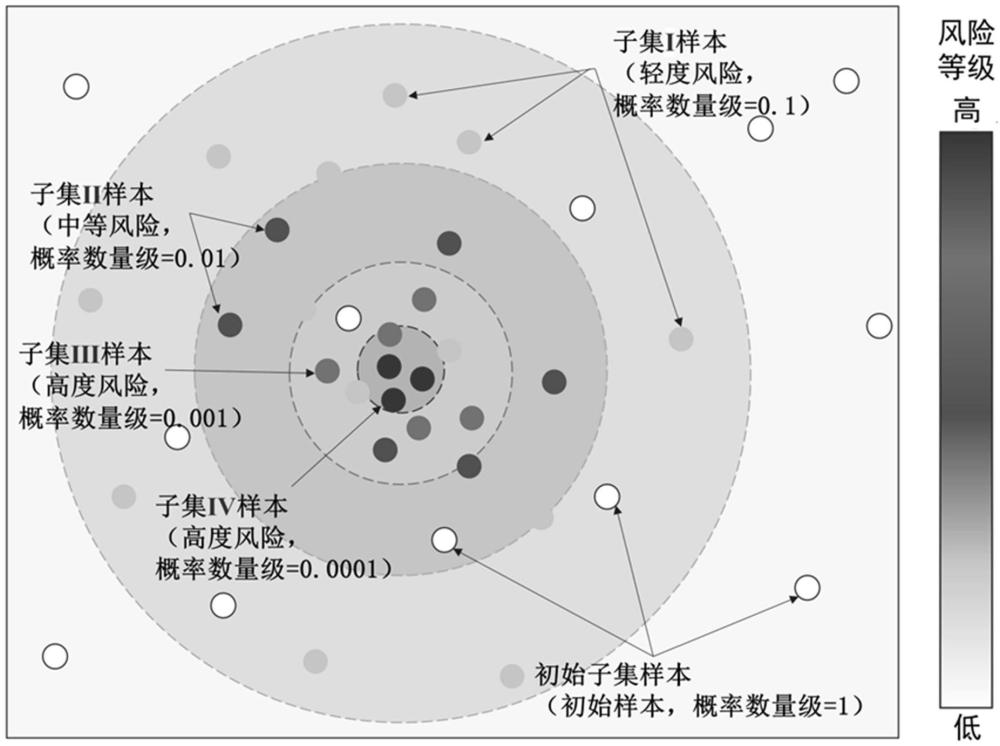
5、步骤s2,基于预先构建的驾驶自动驾驶系统的功能函数,从当前的驾驶场景样本中选取具有高风险的多个样本作为当前层次的种子样本;
6、步骤s3,针对每个种子样本,利用马尔科夫链蒙特卡洛方法,基于自适应缩放后的提议分布标准差,构建独立的马尔科夫链生成新的样本,保证各层次生成的样本总数为n个,更新缩放系数;
7、步骤s4,针对新的样本,基于所述驾驶自动驾驶系统的功能函数,选取具有高风险的多个样本作为当前层次的种子样本,作为新的种子样本,完成当前层次的子集模拟;
8、步骤s5,重复执行步骤s3-s4,直至种子样本的功能函数临界值满足预设条件;
9、步骤s6,通过计算落入碰撞事件区域的种子样本数量,计算失效概率的估计值,实现自动驾驶系统安全性验证。
10、作为优选的技术方案,所述的步骤s3中,所述的提议分布方差的计算过程包括如下步骤:
11、步骤s301,基于当前的缩放系数,自适应调整提议分布标准差。
12、作为优选的技术方案,所述的自适应调整提议分布标准差采用下式实现:
13、σk=min(λiterσ0k,1.0)
14、其中,σk、σ0k为第k个样本更新后的提议分布标准差、提议分布标准差初始值,λiter为第iter轮迭代的缩放系数。
15、作为优选的技术方案,所述的提议分布标准差初始值为种子样本的样本方差。
16、作为优选的技术方案,所述的更新缩放系数的过程包括如下步骤:
17、步骤s302,计算马尔科夫链的平均接受度;
18、步骤s303,基于所述平均接受度,更新所述缩放系数。
19、作为优选的技术方案,所述的缩放系数的更新采用下式实现:
20、
21、其中,λiter+1、λiter分别表示第iter+1、iter代的缩放系数,a*是预先确定的最佳接受率,ζiter是正实数,是所述马尔科夫链的平均接受度。
22、作为优选的技术方案,所述的失效概率的估计值采用下式计算:
23、
24、其中,p0是步骤s2和步骤s4中选取高风险样本的概率,nf为落入碰撞事件区域内的种子样本数量,n为总的种子样本数量。
25、作为优选的技术方案,所述的驾驶场景样本包括自动驾驶系统所有可能状态。
26、本发明的另一个方面,提供了一种电子设备,包括:一个或多个处理器以及存储器,所述存储器内储存有一个或多个程序,所述一个或多个程序包括用于执行前述基于自适应子集模拟的自动驾驶系统安全性验证方法的指令。
27、本发明的另一个方面,提供了一种计算机可读存储介质,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行前述基于自适应子集模拟的自动驾驶系统安全性验证方法的指令。
28、与现有技术相比,本发明至少具有以下有益效果之一:
29、(1)提高在高维场景下自动驾驶系统的安全性验证效率:针对采用蒙特卡洛模拟方法进行测试所需的测试次数非常庞大的问题,本发明采用自适应子集模拟的方式,将一个复杂的、罕见事件的概率分解为一系列更容易模拟和估计的简单事件的概率,通过构建驾驶自动驾驶系统的功能函数,通过分层采样和条件采样实现子集模拟,将整个模拟过程分解为多个层次或阶段,更有效地探索和逼近目标区域或选择的样本特性。
30、(2)提高子集模拟在高维问题中的概率估计的准确性和鲁棒性:针对基于蒙特卡洛马尔科夫方法的性能不理想的问题,本发明在迭代过程中对提议分布标准差进行自适应缩放,通过对一维提议分布的标准差σk进行调整,保持接受率在一个最优的区间内,从而提高采样效率和结果的准确性。
技术特征:1.一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的步骤s3中,所述的提议分布方差的计算过程包括如下步骤:
3.根据权利要求2所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的自适应调整提议分布标准差采用下式实现:
4.根据权利要求2所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的提议分布标准差初始值为种子样本的样本方差。
5.根据权利要求2所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的更新缩放系数的过程包括如下步骤:
6.根据权利要求5所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的缩放系数的更新采用下式实现:
7.根据权利要求1所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的失效概率的估计值采用下式计算:
8.根据权利要求1所述的一种基于自适应子集模拟的自动驾驶系统安全性验证方法,其特征在于,所述的驾驶场景样本包括自动驾驶系统所有可能状态。
9.一种电子设备,其特征在于,包括:一个或多个处理器以及存储器,所述存储器内储存有一个或多个程序,所述一个或多个程序包括用于执行如权利要求1-8任一所述基于自适应子集模拟的自动驾驶系统安全性验证方法的指令。
10.一种计算机可读存储介质,其特征在于,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如权利要求1-8任一所述基于自适应子集模拟的自动驾驶系统安全性验证方法的指令。
技术总结本发明涉及一种基于自适应子集模拟的自动驾驶系统安全性验证方法,包括:1.高维场景参数空间加速测试能力:基于自适应子集模拟技术,采用分层采样和条件采样手段,实现对高维参数空间的高效测试,显著提升了测试效率。2.适应真实被测物的不确定性输出特性:针对具有显著不确定性输出特性的商用自动驾驶系统,本发明提出的方法能够适应其不确定性,提高测试方法的适用性。3.证伪与验证测试需求兼顾:本发明提出的方法能够同时满足证伪和验证测试需求,通过在验证过程中实现证伪,大幅度节约测试资源。本方法能够实现测试资源的高效利用,并获得高可信的测试结果。技术研发人员:田野,傅澳晖,孙剑,张赫受保护的技术使用者:同济大学技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/308550.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表