信息处理装置的制作方法
- 国知局
- 2024-10-09 15:41:00
本发明涉及一种信息处理装置。
背景技术:
1、通过根据预先制作好的动作程序进行动作,能够使机器人进行各种作业,因此,在组装工厂和食品工厂等引入有大量机器人。作为推动了机器人的引入的一个背景,例如担保其安全性的技术的提高。例如,已知为了限制闯入指定的区域的机器人的速度以及加速度,判定工具的前端部的位置是否位于由世界坐标系中的坐标值设定的任意大小的动作限制区域,当工具的前端部的位置位于动作限制区域内的情况下,限制机器人的速度以及加速度中的至少一者(例如专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2018-062026号公报
技术实现思路
1、发明要解决的问题
2、这样,提出了很多降低因机器人的动作而使操作人员受伤或使周边装置受损的风险的技术。但是,并未提出很多降低因机器人的动作而使机器人自身或安装于机器人的末端执行器受损的风险的技术,存在技术开发的余地。尤其是,安装于机器人的末端执行器由于各自具有不同的承重能力和刚性值,因此,因机器人的加减速而受到大的惯性力,积蓄疲劳,有可能产生预料不到的疲劳破坏。因此,需要提出一种在使机器人根据动作程序进行动作时,降低机器人自身或安装于机器人的末端执行器受损的风险的技术。
3、用于解决问题的手段
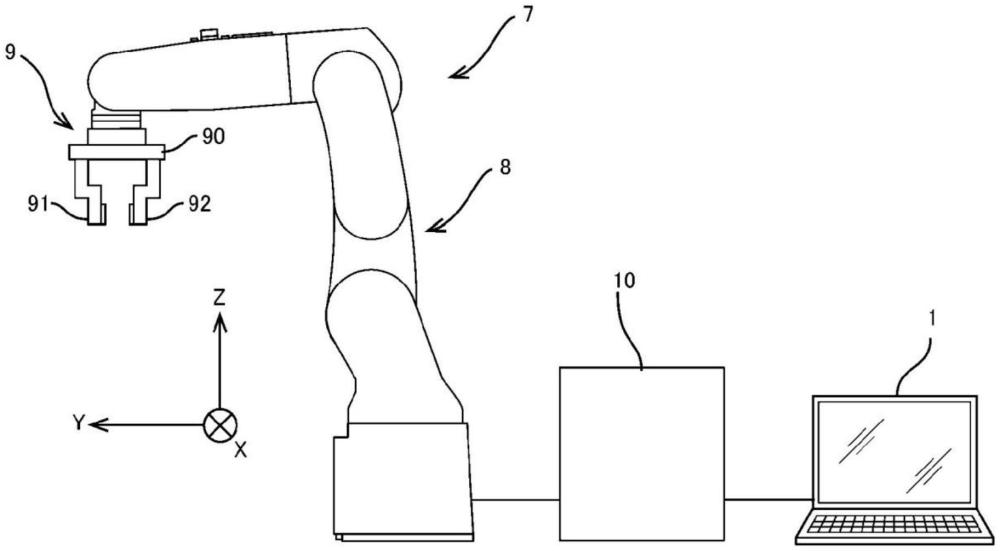
4、本公开的一方式的信息处理装置具有:加速度矢量计算部,基于动作程序或根据所述动作程序使机器人实际动作时的动作信息,计算与所述机器人的基准位置从起点移动至终点的期间内的多个时间点分别对应的多个加速度矢量;以及指标值计算部,基于所述多个加速度矢量,计算成为对作用于所述基准位置的应力振幅进行评价的指标的多个指标值。
5、发明的效果
6、根据本方式,能够在使机器人根据动作程序进行动作时,降低机器人自身或安装于机器人的末端执行器受损的风险。
技术特征:1.一种信息处理装置,其中,具有:
2.根据权利要求1所述的信息处理装置,其中,
3.根据权利要求2所述的信息处理装置,其中,
4.根据权利要求3所述的信息处理装置,其中,
5.根据权利要求2至4中任一项所述的信息处理装置,其中,
6.根据权利要求5所述的信息处理装置,其中,
7.根据权利要求1所述的信息处理装置,其中,
8.根据权利要求7所述的信息处理装置,其中,
9.根据权利要求3或7所述的信息处理装置,其中,
技术总结目的在于,提出一种在使机器人根据动作程序进行动作时,降低机器人自身或安装于机器人的末端执行器受损的风险的技术。本公开的一方式的信息处理装置1具有:加速度矢量计算部21,基于动作程序62或根据动作程序62使机器人装置7实际动作时的动作信息,计算与机器人装置7的基准位置从起点移动至终点的期间内的多个时间点分别对应的多个加速度矢量;以及指标值计算部22,基于多个加速度矢量,计算成为对作用于基准位置的应力振幅进行评价的指标的多个指标值。技术研发人员:藤本武受保护的技术使用者:发那科株式会社技术研发日:技术公布日:2024/9/29本文地址:https://www.jishuxx.com/zhuanli/20241009/309609.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。