一种效率提升的工业机器人机械臂及其工作方法与流程
- 国知局
- 2024-10-09 15:39:39
本发明涉及机械抓手,尤其涉及一种效率提升的工业机器人机械臂及其工作方法。
背景技术:
1、工业机器人是一种能够自动执行各种工业任务的机器装置,它们通常由机械结构、电子控制系统和程序控制系统组成。工业机器人在生产线上进行精确且高效的操作,可以替代或辅助人力完成重复性、繁琐或危险的工作。工业机器人的应用范围非常广泛,包括汽车制造、电子产品组装、金属加工、物流仓储等领域。它们可以执行各种任务,如焊接、装配、搬运、喷涂、打磨、质检等。通过编程和传感器技术,工业机器人能够实现高度灵活的动作和精确的操作,提高生产效率、质量和安全性。
2、机械抓手是一种用于机械臂上执行各种任务的机械装置,通常具有类似人类手臂的结构。它由一系列铰接连接的关节组成,可以在三维空间内移动并执行特定的任务。机械臂广泛应用于工业生产线、仓储物流、医疗手术、太空探索等领域,工业机械抓手常用于自动化生产线上,用于搬运、装配、焊接、喷涂等工序。它们可以根据预先设定的程序执行精确的动作,提高生产效率并减少人为错误。
3、现有技术中,机械抓手运用于对物体进行抓取搬运,通过将物体由产线上抓取至某处或提升至安装点,实现转运或装配的功能。由于机械抓手的执行由各关节配合完成,其抓取后的转动和联动需要一定的执行时间,故而导致与机械抓手配合的产线传输效率的降低。因此,亟待生产一种可提升抓取效率,减少等待时间的工业机器人机械臂。
技术实现思路
1、本发明为了解决上述技术问题提供一种效率提升的工业机器人机械臂及其工作方法。
2、为达到上述目的,本发明采用的技术方案如下:
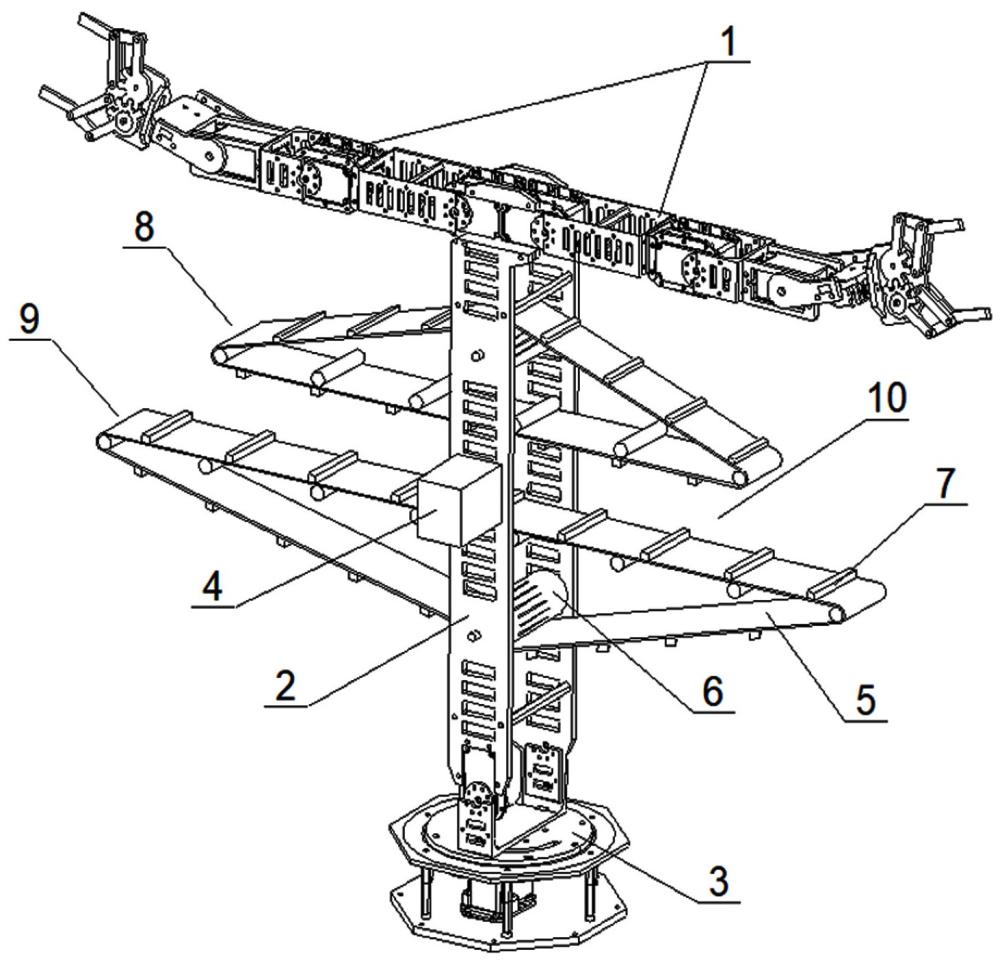
3、一种效率提升的工业机器人机械臂,包括机械抓手、支撑架和旋转基座,所述机械抓手通过支撑架安装于旋转基座上,所述机械抓手包括两个,两个机械抓手相互背对设置,所述支撑架上设置有两组由电机驱动的导向机构,所述导向机构包括输送带和设置于输送带内环的驱动滚轮,所述驱动滚轮架设于支撑架上与电机传动连接,所述输送带的外表面等间距设置有分隔挡板,两组所述导向机构包括第一导向机构和第二导向机构,所述第一导向机构位于第二导向机构的上方,所述第二导向机构的横向长度大于第一导向机构的横向长度,所述第一导向机构和第二导向机构之间形成有传输通道,所述传输通道的两端分别导向两个机械抓手的下方。
4、进一步的,所述支撑架包括两组相对设置的支撑板,两个所述驱动滚轮横向架设于两组支撑板之间,所述第一导向机构和第二导向机构均安装于两组支撑板之间。第一导向机构和第二导向机构上设置有用于将其固定在支撑板上的框架,在框架的固定下,第一导向机构和第二导向机构均可独立固定和运行。输送带的内环设置有齿形结构,驱动滚轮上设计有对应的齿轮,驱动滚轮与输送带的内表面的齿形结构啮合,在电机的驱动下,第一导向机构和第二导向机构同步转动,此外两组支撑板之间的距离不小于物体的宽度。
5、进一步的,所述电机设置于任意一侧所述支撑板上,所述支撑板上设置有供电机输出轴贯穿的轴孔,所述电机的输出轴上设置有传动带,所述传动带的两端分别与两个驱动滚轮传动连接。电机通过架板固定安装于支撑板上,电机的输出轴穿过轴孔与传动带的内环啮合连接,在电机的转动下,传动带跟随转动。
6、进一步的,两个所述驱动滚轮包括第一驱动滚轮和第二驱动滚轮,所述第一驱动滚轮位于第二驱动滚轮的上方,所述传动带的上方内环齿接有引导轮,所述引导轮与第一驱动滚轮齿接,所述第二驱动滚轮与传动带的下方内环齿接,所述第一驱动滚轮与第二驱动滚轮的转动方向相反。驱动滚轮的两端设置有定位杆,支撑板上设置有用于限定定位杆的插孔,第一驱动滚轮和第二驱动滚轮的定位杆分别穿过传动带的内环安装于两个支撑板之间。定位杆上环绕设置有齿条,其中第一驱动滚轮上的齿条位于传动带的外部,第二驱动滚轮上的齿条位于传动带上,并与传动带的内环啮合连接。引导轮的一端固定于支撑板上,引导轮的另一端穿过传动带的内环与传动带啮合连接。引导轮向外延长,同时还与第一驱动滚轮上的定位杆啮合,故而在传动带转动的过程中,第一驱动滚轮反向转动。
7、对应到本技术方案中,当电机的输出轴顺时针方向转动时,传动带、引导轮和第二驱动滚轮顺时针转动,第一驱动滚轮逆时针方向转动,进而引导第一导向机构逆时针转动,第二导向机构顺时针转动,放置于第一导向机构和第二导向机构之间的物体由左端传输至右端;当电机的输出轴逆时针方向转动时,传动带、引导轮和第二驱动滚轮均逆时针转动,第一驱动滚轮顺时针方向转动,进而引导第一导向机构顺时针转动,第二导向机构逆时针转动,放置于第一导向机构和第二导向机构之间的物体由右端传输至左端。
8、进一步的,两组所述支撑板上设置有两个相对布置的固定板,所述固定板上等间距布置有数个纵向导槽,所述纵向导槽上横置有连接两个固定板的限位杆。固定板为棱形结构,与第一导向机构和第二导向机构的侧面形状适配,固定板固定安装于支撑板上,数个纵向导槽等间距布置。
9、进一步的,数个所述限位杆分别穿设于第一导向机构和第二导向机构的内环。除两侧的纵向导槽外,其他纵向导槽上均配备有两个限位杆,其中上方的限位杆对应穿过第一导向机构的内环,下方的限位杆对应穿过第二导向机构的内环。位于两侧的纵向导槽上分别设置有一个限位杆,两个限位杆对应穿过第二导向机构两端的内环。在对限位杆进行高低位置调节时,将同一个纵向导槽上的两个限位杆同步调高,或同步调低,并始终保持两个限位杆之间的距离相同,即物体的高度,使得物体可在第一导向机构和第二导向机构之间进行传输。以传输通道呈向右下方倾斜为例,则将固定板上左侧的限位杆均向上提高,固定板上右侧的限位杆均向下降低,并且使各纵向导槽上的限位杆在平面上呈一条连续的斜线,即可将传输通道调成倾斜的结构。在调节过程中,由于左侧的限位杆和右侧的限位杆同步反向调节,故而可保证限位杆对导向机构的支撑作用,进而保证第一导向机构和第二导向机构的张力,使得第一导向机构和第二导向机构之间可正常限定并运输物体。
10、进一步的,所述限位杆上套设有空心轴套,所述限位杆的两端设置有用于将限位杆固定于固定板上的锁紧机构。限位杆用于支撑架起第一导向机构和第二导向机构的外形结构,故而限位杆会与输送带抵接。为减少滑动摩擦带来的动能损耗,在限位杆上设置空心轴套,可通过空心轴套的跟随转动来减少摩擦损耗。优选的,限位杆的两端设置有螺纹结构,锁紧机构与螺纹结构螺纹连接。在将限位杆移动至需求位置后,将限位杆两端的锁紧机构拧紧,即可将限位杆固定在固定板上的需求高度。
11、一种效率提升的工业机器人机械臂的工作方法,包括以下步骤:
12、s1:将旋转基座安装于两个产线之间或产线与装配线之间,一个机械抓手执行抓取作业,另一个机械抓手执行释放或装配作业;
13、s2:抓取端的机械抓手将产线上的物体抓取后,将物体移动至第一导向机构和第二导向机构之间,并且将物体限定于任意两个分隔挡板之间;
14、s3:启动电机,电机通过引导轮和传动带驱动第一驱动滚轮和第二驱动滚轮的转动,两个驱动滚轮的转动方向相反使得相邻侧的输送带同向移动,进而带动物体向设定方向移动;
15、s4:若两个产线之间或产线与装配线之间的高度不同,通过调节任意限位杆在固定板上的位置,进而调节传输通道的导向方位。
16、进一步的,在步骤s1中,所述机械抓手的活动范围覆盖对应侧产线或装配线的抓取范围。
17、进一步的,在步骤s4中,在调节的过程中保持传输通道的竖向宽度不小于物体的高度。
18、与现有技术相比,本发明具有以下有益效果:
19、1、本发明通过在支撑架上设置两个朝向相背的机械抓手,可同时进行抓取作业,并通过在支撑架上设置导向机构,将物体由一端导向另一端,可大幅提升产线的运输效率,减少因机械抓手转动而消耗的等待时间;
20、2、本发明通过在支撑板上设置两个相对布置的固定板,并通过在固定板上设置纵向导槽和数个在纵向导槽上活动的限位杆,来调节第一导向机构和第二导向机构的形状以及导向,进而减少机械抓手的移动距离,提高对转运现场或装配线上的适配性;
21、3、本发明在机械抓手和导向机构的配合下,可减少机械抓手的活动距离,减少能耗缩短时间,进而在多次重复性机械活动的总体时间进程下大幅提升生产效率。
本文地址:https://www.jishuxx.com/zhuanli/20241009/309508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
往复摇摆结构的制作方法
下一篇
返回列表