基于时间窗和改进A星算法结合的多AGV路径规划方法与流程
- 国知局
- 2024-10-15 10:23:59
本发明属于路径规划领域,具体为一种基于时间窗和改进a星算法结合的多agv路径规划方法。
背景技术:
1、仓库是生产加工与物流运输的重要中转平台,仓库系统的合理使用正在日益成为制造企业与物流企业关注的焦点。智能化仓库(intelligent warehouse)作为工业生产物流环节和现代物流技术的重要组成部分,利用计算机技术和人工智能技术优化整个物流搬运流程,能够提高工作效率、降低人工成本。自动导引运输车(automatedguided vehicle,agv)作为仓库系统完成搬运任务的主要工具,对整个仓库系统的运行起着决定性的作用,将传统仓库系统中“人到货”模式转变为“货到人”的模式,提高了智能仓储系统的运行效率。
2、国内外有许多学者都做过关于仓储系统agv的任务分配和路径规划方面的研究,但是随着仓库规模的增大,agv数量和货架数量增多,路径网络变得复杂,有必要更进一步针对仓库系统中的agv任务分配问题和路径规划问题进行相关研究。专利[202010567994.0]提出了一种智能车库多agv的路径规划方法,考虑了转弯和冲突并采用时间窗推后或延迟消解冲突,但其未考虑时间窗推后或延迟无法解决的长路段冲突问题。专利[202210269477.4]提出一种基于时间窗和改进a*算法的多agv路径规划方法,考虑了agv路径冲突问题,但是没有考虑转弯带来的额外能耗和时间成本。专利[202210260353.x]提出一种基于时间窗的多agv实时调度的路径优化方法,通过设置避障点实现冲突消解,但没有考虑路径最短和转弯次数最少的问题。专利[202110789546.x]提出一种多agv路径规划和多agv智能生产线中agv与机器联合调度方法,解决了冲突问题,但仍综合未考虑路径最短和转弯次数这两个目标的实现。可以看出,目前关于多agv路径规划的研究大部分都集中在如何实现避免agv发生冲突,但没有将转弯次数少、路径最短和冲突消解进行综合考虑。即使考虑了转弯,但仍然需要考虑更复杂的重新规划情况。因此有必要进一步研究一种能实现更优化搬运过程的agv路径规划方法。
技术实现思路
1、为解决上述问题,本发明提供一种基于时间窗和改进a星算法结合的多agv路径规划方法,主要考虑在静态障碍物确定的情况下,以路径最短为优化目标的单agv路径规划算法;以及考虑多个agv在智能仓储系统完成搬运任务可能会发生的碰撞、冲突情况,结合避碰方法和单agv路径规划方法的多agv路径规划方法。
2、为了实现上述发明目的,本技术提供的技术方案如下:
3、基于时间窗和改进a星算法结合的多agv路径规划方法,包含以下步骤:
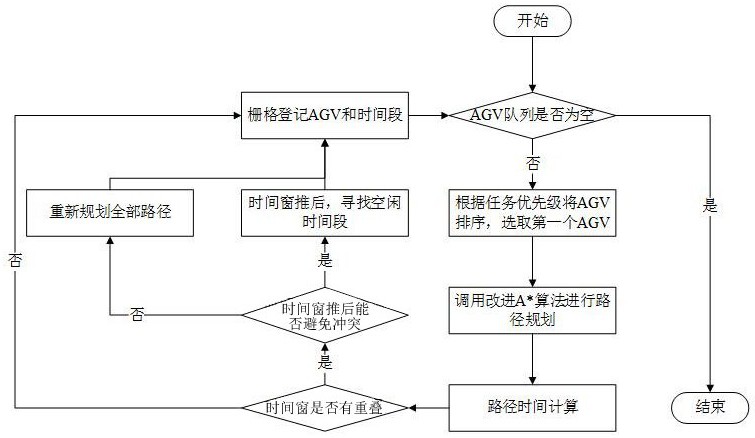
4、步骤(1).判断agv队列是否为空:任务分配完成后,如各个agv都拥有各自任务串,则agv队列不为空,所有带有搬运任务的agv组成agv队列执行下一步骤,如果存在为空的agv队列,则结束规划;
5、步骤(2).根据任务的优先级对所有agv进行排序,根据排序选出第一个agv,调用改进a星算法进行路径规划,进行路径时间计算,确定时间窗,明确占用各个栅格编号和占用的时间;
6、步骤(3).选出下一个agv,进行路径时间计算;
7、步骤(4).基于时间窗算法判断时间窗是否与第一个agv重叠,如果重叠,则判断如将下一个agv到达冲突点的时间窗后移,让下一个agv在冲突节点的前一个栅格等待第一个agv通过,能否避免发生冲突,如果可以避免冲突则将时间窗推后寻找空闲时间段并插入,如果不能则对下一个agv重新规划整个运行路径,如果不冲突,则登记该agv占用的栅格编号和占用的时间,并从队列中删除该agv;
8、步骤(5).确定agv队列是否为空,即所有agv都规划好了路径,如果为否,则回到步骤(3)将下一个agv初始化为第一个agv;
9、步骤(6).若agv队列为空,则输出多agv路径规划方案。
10、进一步地,步骤(2)中,所述改进a星算法在a星算法原始启发式函数的基础上增加转弯因数来作为罚函数,agv在行驶到每一栅格所在位置时会判断是否需要转弯,如果继续直行而选择的栅格是自由通行栅格,那就选择该栅格来保持直行而不选择转弯,确保直行栅格优先度大于转弯栅格优先度。
11、进一步地,步骤(2)中,所述改进a星算法在a星算法原始启发式函数的预估函数h(n)前增加一个权重参数,从而改变启发函数的权重;通过调整实际代价与预估代价的比值,可以有效减少搜索的节点数,提高搜索速度。
12、进一步地,步骤(2)中,改进a星算法的启发式函数如下式:
13、;式中,表示起点到目标终点的总体估值;表示从起点到当前所在节点n的实际代价值;为权重参数,用于调整实际代价与预估代价的比值,减少搜索节点数;表示当前所在节点 n遍历所有中间节点之后到终点代价的估价值; k为常数; r为转弯次数。
14、进一步地,步骤(4)中的时间窗的是指将agv执行某个特定动作所持续经历的时间合在一起,构成了这一过程的时间集合。
15、再进一步地,假设第 n个agv拥有 a个时间窗,其所述时间窗表示为,其中t的下标表示时间窗个数,按时间窗前后顺序排序,且上一个时间窗的结束时间大于下一个时间窗的起始时间,关于agv的运动时间用下式来求解:
16、;式中代表agv自身长度,l路代表从起点到终点的距离,v代表agv速度。
17、更进一步地,为了便于在后续对算法进行验证,对所形成的时间窗做以下的假设以控制额外变量:
18、a).假设agv为质点,不再考虑agv自身的大小,每一个agv行驶时都会占用一个栅格;
19、b).每一个栅格均设置为双向单通道,一个栅格只能允许一个agv通行,但栅格具有双向性,agv可通过栅格往上下左右四个方向移动;
20、c).agv为直线匀速行驶,速度,不考虑加减速以及去货架搬运货物所需要的等待时间,在转弯的时候看作匀速通过三个栅格;
21、d).当agv通过某一栅格之后,就立即释放该栅格状态为空闲;
22、将以下两个公式作为agv路径规划过程中的每个任务的原始时间窗和时间点参数,输入到上述方法中,首先在完成路径规划后更新上述参数,然后将更新后的时间窗和时间点参数下发到各agv上执行任务:
23、;
24、;
25、在上式中,表示为第m个agv完成搬运任务时所规划路径的时间窗;和为该agv到达路径中第k个和第k+1个栅格的时间点;为该agv路径中第i个和第i+1个栅格之间的距离。
26、本发明的有益效果在于:
27、1、本方法根据实际仓储环境agv运行的特点,在a星算法基础上,提出了改进的a星算法来用于仓储系统单agv路径规划,针对传统a星算法存在的“agv运动所规划路径可能存在转弯次数过多的问题”,改进了a星算法的启发函数来减少agv转弯次数。
28、2、本方法分析了多agv冲突类型和解决策略,提出了一种基于时间窗和改进a星算法结合的混合调整策略来用于多agv路径规划,并且通过仿真实验证明了所提出的多agv路径规划方法相比于未采用调整策略下的agv路径规划方法在避免agv冲突方面的优越性。
本文地址:https://www.jishuxx.com/zhuanli/20241014/317547.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表