廊道点云多条件限制下的精配准方法与流程
- 国知局
- 2024-10-15 09:35:39
本发明涉及图像处理,尤其涉及一种廊道点云多条件限制下的精配准方法。
背景技术:
1、点云在廊道工程监测和模型重建有着广泛的应用,利用点云数据监测廊道的形变。通过地面激光扫描数据自动识别盾构廊道衬砌结构并创建参数化竣工建筑信息模型。根据点云与图像的对应关系获取廊道的精确结构模型。廊道场景下的点云获取的激光扫描主要可以分为架站式和移动激光系统(mls),对于地铁、铁路廊道这种轨道式廊道来说mls是最常见的点云获取方式,测量完成后就是完整的点云。对于非轨道式廊道,如人行廊道,多采用架站式激光扫描仪获取点云。对于架站式激光扫描仪获取的点云数据,为了重建完整且精确的三维模型,需要将相邻扫描通过坐标变换精确配准到同一个坐标系中。
2、在廊道场景中精确配准点云非常具有挑战性,这是因为廊道中存在着极其重复和对称的结构和弱的几何特征,并且廊道场景中的特征结构会产生遮挡,增加了对应匹配中的不确定性。但是现在很少有面向廊道本身结构特征来实现精配准的研究,大多数研究侧重于森林或城市这一类带有明显几何特征的场景。采用定位球来做为廊道配准的特征,利用固定控制点来确定扫描点的坐标和参考坐标系的方向,这些方法没有利用到廊道本身存在的几何特征。
3、点云精配准主要步骤有两个;一个是对应匹配,为了寻找相邻扫描中成对的点,这些点对是在不同扫描中的现实世界的同一映射;另一个是配准,通过对应匹配关系求解转移矩阵。地面点云的精配准对廊道模型重建、衬砌结构识别的应用至关重要,但是廊道中存在着许多重复的结构和弱的几何特征,再加上扫描的遮挡给配准带来了巨大的挑战。
技术实现思路
1、鉴于此,本发明提供一种廊道点云多条件限制下的精配准方法。
2、本发明公开了一种廊道点云多条件限制下的精配准方法,其包括:
3、步骤1:廊道点云数据的预处理,预处理包括廊道底面点云提取、底面修正、中轴线提取和廊道侧面提取;
4、步骤2:关键点筛选和对应匹配,通过法向量差异提高关键点的质量,并在距离限制下利用几何相似度寻找对应匹配;
5、步骤3:将布尔莎七参数坐标转换模型降维并精确化后生成g-m模型,不断迭代求解直到g-m模型达到迭代停止条件为止,得到三参数转移矩阵;基于三参数转移矩阵以及估计得到的廊道点云高差,计算最终估计的转移矩阵,以实现通过g-m模型剔除错误的对应匹配。
6、进一步地,所述步骤1包括:
7、使用体素滤波降采样廊道点云,将点云投影到xoy面;确定廊道主方向是沿x轴或者沿y轴,沿主方向计算中轴线;若主方向为x轴,以预设步长沿x轴从最小值计算,计算预设步长范围内的y值最大点和最小点以及最大点和最小点之间的中点,将该中点作为中轴线点;
8、沿z轴方向提取从廊道的最小值开始预设距离范围内的点,以中轴线为约束,选择距离中轴线中最近点的平面距离小于阈值的点为底面点;
9、目标廊道底面点云qbottom,源廊道底面点云pbottom,随机抽样nbottom个底面点,底面修正表示为:
10、
11、其中,(xi,yi,zi)表示第i个底面点的坐标,α、β分别代表绕x轴和y轴的旋转角,δz为经过修正后的廊道底面点云的z值,zn为廊道底面点云中各个点的z值,通过最小二乘法求解公式(1)即可求得两个修正角;修正角指的是绕x轴和绕y轴的旋转角度;通过旋转修正角度可使廊道底面水平;
12、通过旋转矩阵乘以点云,得到源点云和目标点云的底面修正矩阵rsc和rtc;其中,旋转矩阵是通过绕x、y、z三个坐标轴旋转所需旋转角度的矩阵;
13、利用底面修正后的廊道点云提取侧面点云;提取的源廊道和目标廊道侧面点云到各自的底面高度范围相同。
14、进一步地,所述关键点筛选和对应匹配,通过法向量差异提高关键点的质量,包括:
15、使用邻近点的法向量差异以及高度限制来筛选关键点,剔除满足公式(2)或者公式(3)的关键点;
16、
17、其中,θ(.)表示两个向量的夹角,np表示点p的邻近点的平均法向量,np表示点p的法向量,zp表示点p的高程值,zmax和zmin分别表示截取的侧边廊道的顶部和底部高程值;使用关键点与中轴线的差异将关键点分为两类;
18、利用中轴线将关键点沿中轴线分为两类,以限制关键点的对应范围。
19、进一步地,所述在距离限制下利用几何相似度寻找对应匹配,包括:
20、步骤21:使用关键点的几何特征相似性寻找对应匹配,得到几何相似度;
21、步骤22:在半径域内搜索关键点,找到几何相似度最大的两个关键点;若几何相似度大于阈值,则将两个关键点加入到对应点对。
22、进一步地,所述步骤21包括:
23、使用关键点的几何特征相似性来寻找对应匹配,几何特征之间的相似度表示为:
24、
25、其中,pki和qki分别表示源点云和目标点云中的关键点,点pki和qki在法线、平均曲率、距离方面的相似度为w1、w2、w3,n(.)表示样本点与其半径r邻域内点法向角的平均值,c(.)表示样本点的平均曲率,d(.)表示样本点与其半径r邻域内点到质心的距离的平均值,几何相似度为s=w1×w2×w3;
26、所述步骤22包括:
27、在半径域di内搜索关键点,找到相似度最大的两个关键点pki和qki;如果相似度大于阈值,则将两个关键点加入到对应点对;
28、
29、其中,为相似参数,为阈值。
30、进一步地,所述利用对应点对构建g-m模型,不断迭代求解直到g-m模型达到迭代停止条件为止,得到转三参数移矩阵,包括:
31、选择布尔莎七参数转换模型作为点云配准中参数求解的基本模型,选择g-m模型来削弱因为遮挡、局部特征相似导致的错误对应;
32、布尔莎七参数转换模型为:
33、
34、其中,(xs,ys,zs)和(xt,yt,zt)分别表示源点云和目标点云中的对应点,(tx,ty,tz)表示位移参数,m表示缩放参数,rz,ry和rx表示绕三个坐标轴的旋转矩阵,公式(7)简化为:
35、
36、其中,α,β,κ表示绕三个坐标轴的旋转角度,将公式(8)降维后,得到:
37、
38、假设目标点云表面和源点云表面是相互独立,并且源点云和目标点云中的对应匹配点之间存在误差,公式(9)转换为g-m模型,即:
39、
40、其中,ex和ey表示误差,p表示权重矩阵,公式(10)的简化形式为:
41、e=ax-l,p (11)
42、使用统计和期望算子假设:
43、e~n(0,σ2p-1) (12)
44、σ为标准差;
45、通过g-m模型得到以下公式:
46、
47、∧表示估计量,式(11)的模型中l包含了未知量κ,通过向g-m模型输入初始值,然后通过迭代计算得到g-m模型的无偏最小二乘解最小二乘解;结合公式(14)和公式(15)求v0和v0为第一次估计的模型误差,为第一次估计的标准差;
48、获取初始值和权矩阵p后,便可通过迭代计算g-m模型的解,计算系数向量li,i表示迭代次数;通过式(13)求解然后通过更新li,不断迭代直到前后两次解向量差异小于预设值;
49、最后通过求解三参数转移矩阵tgm;利用权矩阵得到误差没有超过限制的对应点的索引idex={ip,iq},其中,ip表示源对应关键点的索引,iq表示目标对应关键点的索引。
50、进一步地,获取所述g-m模型输入的初始值,包括:
51、建立以下方程组:
52、
53、公式(16)的简化形式为:
54、l′=ax (17)
55、利用公式(17)的最小二乘解作为g-m模型的初始值;
56、所述权矩阵的计算公式为:
57、
58、其中,v0_i为第一次估计的第v0的第i个元素。
59、进一步地,所述迭代停止条件为:
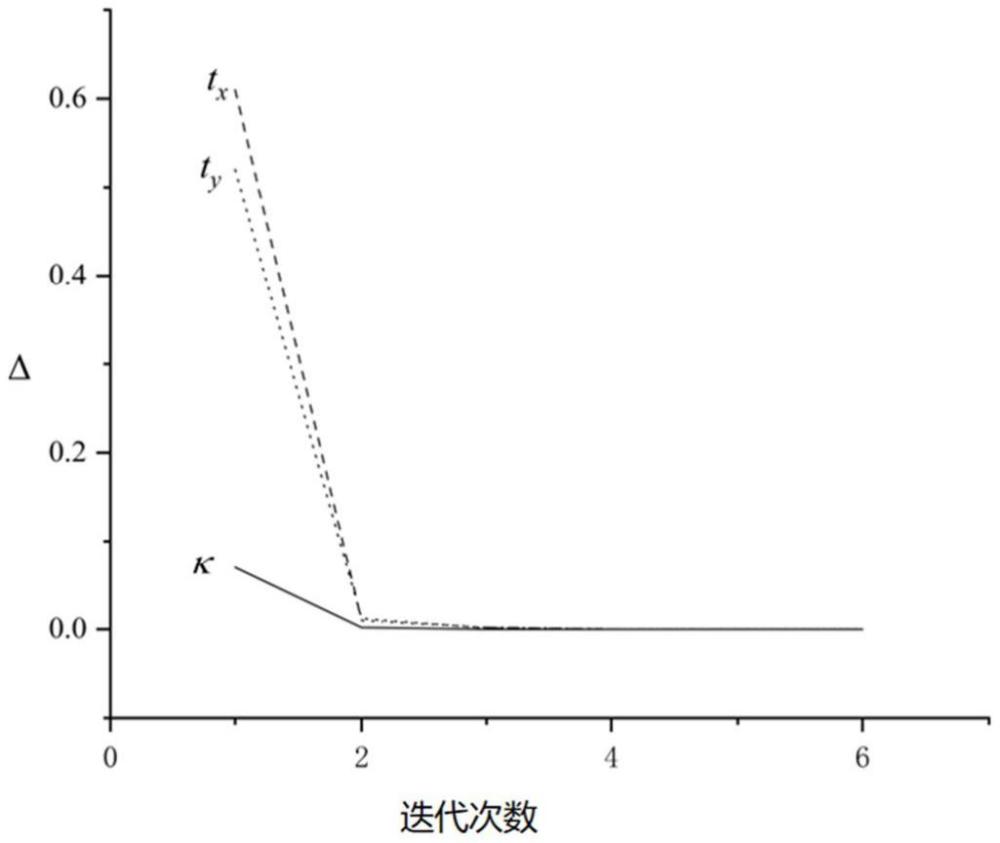
60、若对应点对数少于m对,则停止迭代;若g-m求得的转移参数小于预设值,则停止迭代;迭代停止条件的表达为:
61、
62、其中,表示第i次迭代计算得到的对应匹配点对数量,ei表示第i次迭代利用g-m模型求出的三参数转移矩阵的参数的值包括tx,ty和κ。
63、进一步地,通过所述g-m模型求解得到三参数转移矩阵时,g-m模型每次迭代的距离阈值为:
64、通过三参数转移矩阵变换目标点云的关键点,将利用g-m模型计算时,误差没有超限的对应关键点的平均距离作为下次迭代的距离阈值,每次迭代的距离阈值计算公式为:
65、
66、其中,和表示第i-1次迭代对应关键点转换后的正确对应点和的距离,和是索引idex={(i-1)p,(i-1)q}中的点对,ncorrect_c表示第i-1次迭代正确对应的关键点个数。
67、进一步地,所述基于三参数转移矩阵以及估计得到的廊道点云高差,计算最终估计的转移矩阵,包括:
68、利用三参数转移矩阵tgm变换目标廊道底面点云,通过随机抽样的方法选择变换后目标底面中的点,然后在源底面点云中搜索与目标底面中的点距离最近的点,若最近的距离小于指定值,则统计为高差估计点对,通过统计高差估计点对估计廊道点云高差,即:
69、
70、其中,h表示高差,nr表示随机抽样数量,qrb表示随机抽样的qbottom经过三参数转移矩阵tgm变换的点,ne表示随机选择的目标底面点与其最近点距离小于指定值的数量,表示最近点的z值,表示最近点的欧式距离;
71、最终的转移矩阵由底面修正转移矩阵和g-m模型求解出的三参数转移矩阵加上最终的高差得到:
72、te=[tsc-1tgmttc]h (21)
73、其中,te表示最终估计的转移矩阵,tsc表示源廊道底面的修正矩阵,ttc表示目标廊道底面的修正矩阵,tgm表示g-m模型估计的三参数转移矩阵;[.]h表示转移矩阵沿z轴移动的值为h。
74、由于采用了上述技术方案,本发明具有如下的优点:
75、1)本发明提供了一种廊道点云精配准的框架。以往的算法仅使用特征描述符及其相似性来寻找对应关系,这种思想在廊道场景下并不有效,这是因为廊道场景下弱的几何特征及两侧及其对称的结构导致的。提出的方法有效的解决了廊道场景下的精配准难题。
76、2)提供了一种提升关键点质量和分类的方法。首先利用法向量差异和高程值来筛选关键点,然后利用中轴线将关键点分为两类,只有在同一侧的关键点会被对应匹配。
77、3)本发明提出了一种不断严格的距离限制。目标关键点随着迭代不断接近源关键点,对应匹配的搜索范围也会逐渐减小。
78、4)参数的转移矩阵被拆分为三部分求解。其中绕x轴和绕y轴的旋转角度很小,两个点云的高差也容易获取,这两部分通过底面计算。其余三参数通过g-m模型计算得到,g-m模型的计算少了3个参数,这提高了算法的效率。
79、5)g-m模型会进一步剔除那些几何特征相似但是错误的对应匹配,由于构建的g-m模型的常数向量中含未知数,无法直接使用最小二乘求解,因此提供了一种迭代求解的方法解决这个问题。
本文地址:https://www.jishuxx.com/zhuanli/20241015/314658.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表