基于3C行业机器人视觉检测与的空间建模定位方法与流程
- 国知局
- 2024-10-21 14:25:02
本发明涉及神经网络识别领域,具体涉及基于3c行业机器人视觉检测与的空间建模定位方法。
背景技术:
1、在现有的工业自动控制领域,常用的技术手段是采用传感器探测温度、高度、密度、重量、液面高度等参数,进而作出判断,进一步实现控制动作,申请号为cn202211675225.8的专利公开了一种基于视觉图像分析的设备监控自动控制系统,所述自动控制系统包括摄像系统、图像识别系统、容错指令系统,执行系统;摄像系统拍摄目标图像,所述目标图像进入图像识别系统,所述图像识别系统通过识别目标图像产生判断结果,所述判断结果进入容错指令系统,容错指令系统按照一定逻辑筛选出输出结果,执行系统根据所述输出结果执行自动控制动作;所述图像识别系统包括参数优化神经网络模块,图像识别神经网络模块,所述参数优化神经网络模块通过训练样本得到优化的参数w和b;该发明方法能够实现老旧工业产线的部分工业自动化要求,提高产线的工作效率、可靠性及安全性;解决了老旧产线无法自动化抬犁问题。实现了现场无人值守要求,但仍然存在以下不足之处:该设备监控自动控制系统无法对自动化生产线中的每个物品设备的动态运动轨迹进行实时监测,及时获知机器人工作过程中异常物品的情况发送错误工作导致的问题。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供基于3c行业机器人视觉检测与的空间建模定位方法:单双目的视差和摄像头的位置信息,进行三维场景的建设,将不同视角下的特征点映射到三维空间中,从而构建出三维点云模型。将三维空间中采集到的图像、视屏通过cnn卷积神经网络在输入的图像、视屏上进行特征提取不断的进行自我学习和优化加强轴机器人和产品线的异常动态跟踪判断,因此,能够及时获取轴机器人的情况,智能化程度高、异常发现速度快,避免异常的监控设备坚持使用造成严重的经济损失,而且只对初步异常的监控设备进行进一步的异常判断,无需采集过多的数据,避免数据处理量大造成巨大的经济成本。
2、本发明的目的可以通过以下技术方案实现:
3、基于3c行业机器人视觉检测与的空间建模定位方法,包括:
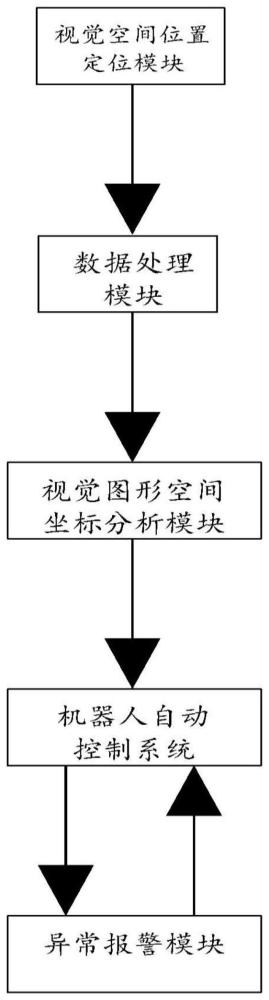
4、视觉空间位置定位模块,通过单双视觉传感器对生产线中的产品进行空间坐标的建立同时进行拍摄,获得标准图片、分析视频,并将标准图片、分析视频发送至数据处理模块;
5、数据处理模块,用于根据拍摄视频获得分析图像a和分析视频b,将a进行清洗、去噪,空间坐标校准后发送至视觉图形空间坐标分析模块;
6、视觉图形空间坐标分析模块,用于根据分析物品图片和物品视频与数据库的物品图片和物品视频进行比对,计算运动坐标并校准比对,并将比对数值发送至机器人自动控制系统;
7、机器人自动控制系统,用于接收分析视觉图形空间坐标分析模块数据,将出现异常的运行参数发送至异常报警模块;
8、异常报警模块,用于根据异常系数>50%进行异常报警处理,同步将切断运行信号发送给机器人自动控制系统,机器人自动控制系统切断电源停止运行。
技术特征:1.基于3c行业机器人视觉检测与的空间建模定位方法,其特征在于,包括:
2.根据权利要求1所述的3c行业机器人视觉检测与的空间建模定位方法,其特征在于,所述图像获取模块获得标准物品图片、分析物品视频的具体过程如下所示:
3.根据权利要求1所述的基于视觉图像分析的机器人自动控制系统,其特征在于,所述图像分析模块获得物品图片和分析物品视频的数据比对具体过程如下所示:
4.根据权利要求1所述的3c行业机器人视觉检测与的空间建模定位方法,其特征在于,所述机器人自动控制系统获得异常系数的具体过程如下所示:
5.异常报警模块接收到异常系数后进行报警,同步将切断运行信号发送给机器人自动控制系统,机器人自动控制系统切断电源停止运行。
6.基于3c行业机器人视觉检测与的空间建模定位方法,其特征在于,包括以下步骤:
技术总结本发明涉及神经网络识别领域,具体涉及基于单双目复合视觉系统与机器人系统的空间建模方法,用于解决轴工业机器人对生产线动态产品设备的实时运动轨迹的抓取和精密定位的情况,及时获产品运行的是否正确的状况,在出现产品线的产品运送异常的时候无法及时的采取有效处理,进而仍然无法做到高效的发现问题并及时作出应急反应的问题;该方法通过单双目的视差和摄像头的位置信息,进行三维场景的建设,将不同视角下的特征点映射到三维空间中,从而构建出三维点云模型。将三维空间中采集到的图像、视屏通过CNN卷积神经网络在输入的图像、视屏上进行特征提取不断的进行自我学习和优化加强轴机器人和产品线的异常动态跟踪判断,因此,能够及时获取轴机器人的情况,智能化程度高、异常发现速度快,避免异常的监控设备坚持使用造成严重的经济损失,而且只对初步异常的监控设备进行进一步的异常判断,无需采集过多的数据,避免数据处理量大造成巨大的经济成本。技术研发人员:杨宝军,卢宏森,戴鹏,史晓琳,廖冠豪受保护的技术使用者:苏州圆喀方科技有限公司技术研发日:技术公布日:2024/10/17本文地址:https://www.jishuxx.com/zhuanli/20241021/318071.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。