一种直线感应电机的励磁电感辨识方法、电流控制方法及系统
- 国知局
- 2024-11-06 14:33:05
本发明属于直线电机控制,更具体地,涉及一种直线感应电机的励磁电感辨识方法、电流控制方法及系统。
背景技术:
1、直线感应电机(linear induction machine,以下简称lim)由旋转感应电机(rotary induction machine,以下简称rim)沿直径方向剖开展平而来,其可产生沿直线方向的推力,省去了中间机械传动环节,具有结构简单、可靠性高、加减速快等诸多优点,已在如轨道交通、军工和工业制造等诸多领域得到广泛应用。然而,受初级铁芯开断影响,lim存在特殊的端部效应:初级始终进入没有磁场的次级区域,由楞次定理,在初级入端和出端区域,次级感应板将产生涡流阻止磁场的变化,进而产生畸变的气隙磁场。随着运行速度的增加,气隙磁场畸变将愈加严重,等效励磁电感参数变化明显,会导致控制器参数失配,使控制性能恶化。且考虑到lim中受端部效应影响严重、且对控制性能影响严重的参数仅有励磁电感;因此,亟需研究一种直线感应电机的励磁电感辨识方法,以进一步通过电流控制,使电机的速度和磁链达到预设值。
2、目前,现有的直线感应电机的励磁电感辨识方法往往通过离线参数辨识方法或在线参数辨识方法获得励磁电感参数。其中,离线参数辨识方法主要通过查询速度、滑差等工况参数与励磁电感参数直接的关系曲线来获取励磁电感参数;但是,随着速度、滑差等工况改变,lim励磁电感参数变化复杂,现有的离线辨识方法难以全面覆盖运行工况的复杂变化,因此仅适用于简单工况场景。为了避免上述问题,现有技术通常采用在线参数辨识方法获得励磁电感参数,该方法往往先采样电机相电流,然后代入现有的观测器参考模型计算得到励磁电感。现有的观测器参考模型依赖于电流微分项进行处理,该部分对电流噪声非常敏感,会增大参考模型中反电势谐波,进而导致电感参数辨识结果有较大误差,辨识精度较低。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供一种直线感应电机的励磁电感辨识方法、电流控制方法及系统,用以解决现有技术无法准确辨识励磁电感的技术问题。
2、为了实现上述目的,第一方面,本发明提供了一种直线感应电机的励磁电感辨识方法,包括:在当前控制周期t下,执行以下操作:
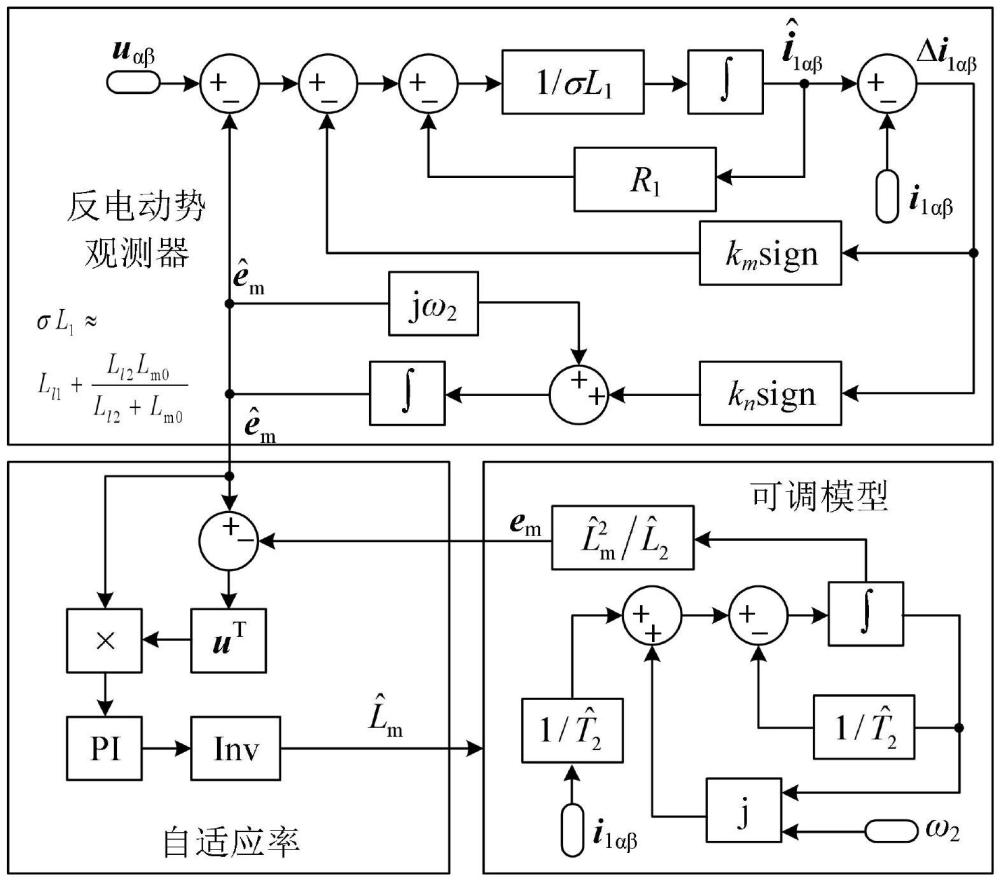
3、将当前控制周期t下直线感应电机的αβ轴初级电流i1αβ(t)、电压矢量uαβ(t)和次级角速度ω2(t)代入基于滑模观测器的参考模型中计算得到反电动势的观测值其中,参考模型为:
4、
5、其中,为i1αβ(t)的观测值;电机的漏磁电感系数l1=lm0+ll1,lm0为电机静止时的励磁电感,ll1为初级漏感;r为电机的初级电阻;km和kn均为预设增益参数,且均为正数;sign(·)为符号函数;
6、计算得到电机励磁电流im(t)=i1αβ(t)+l2i2αβ(t)/lm;其中,i2αβ(t)为当前控制周期t下直线感应电机的αβ轴次级电流;l2=lm0+ll2,ll2为次级漏感;
7、将i1αβ(t)、ω2(t)和im(t)代入可调模型中进行计算,得到反电动势的计算值em(t);其中,可调模型为:
8、
9、其中,和分别为上一个控制周期t-1下的励磁电感观测值及对应的次级电感;j为虚数符号;为上一个控制周期t-1下的次级时间常数;r2为次级电阻;
10、将和em(t)代入中进行计算,得到当前控制周期t下的励磁电感观测值并作为当前控制周期t下的励磁电感辨识结果进行输出;其中,kp和ki均为正数;s为积分符号。
11、进一步优选地,上述直线感应电机的励磁电感辨识方法,还包括:
12、在得到反电动势的观测值后,对采用n个级联、且相同的低通滤波器进行滤波处理后,得到对进行补偿,得到并将更新为
13、其中,为经过前i级低通滤波器后的结果;为初始输入的i=1,2,…,n,n≥2。
14、第二方面,本发明提供了一种直线感应电机的励磁电感辨识系统,包括:存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时执行本发明第一方面所提供的励磁电感辨识方法。
15、第三方面,本发明提供了一种直线感应电机的电流控制方法,包括:
16、获取当前控制周期t下直线感应电机的αβ轴初级电流i1αβ(t)和次级角速度ω2(t),以及电压矢量uαβ(t)后,采用本发明第一方面所提供的励磁电感辨识方法辨识得到励磁电感观测值
17、将当前控制周期t下直线感应电机的αβ轴初级电流i1αβ(t)、次级角速度ω2(t)、次级磁链ψ2αβ(t)以及励磁电感观测值代入直线感应电机的数学模型中,计算下一控制周期t+1下的次级磁链ψ2αβ(t+1);
18、对次极磁链ψ2αβ(t+1)与次级磁链参考值ψ2ref的差值进行pi控制,得到d轴电流参考值idref;对当前控制周期t下直线感应电机的次级速度v2(t)与速度参考值vref的差值进行pi控制,得到q轴电流参考值iqref;
19、将d轴电流参考值idref和q轴电流参考值iqref转换至αβ轴,得到αβ轴初级电流参考值i1αβref;
20、对于每一个可选的电压矢量,将其与αβ轴初级电流i1αβ(t)、次级角速度ω2(t)、次级磁链ψ2αβ(t)以及励磁电感观测值代入直线感应电机的数学模型,得到该电压矢量对应的下一控制周期t+1下的αβ轴初级电流i1αβ(t+1),并计算与αβ轴初级电流参考值i1αβref间的差异程度,作为代价函数;
21、选取代价函数最小的电压矢量作为下一控制周期t+1下的电压矢量uαβ(t+1),生成相应的逆变器开关信号后,在下一控制周期t+1下,将生成的开关信号施加到用于控制直线感应电机的逆变器。
22、进一步优选地,直线感应电机的数学模型如下:
23、
24、其中,l1=lm0+ll1,lm0为电机静止时的励磁电感,ll1为初级漏感;为当前控制周期t下的次级电感;ts(t)为当前控制周期t的时间长度;r1和r2分别为直线感应电机的初级电阻和次级电阻;j表示虚数算子;i2αβ(t)为当前控制周期t下直线感应电机的αβ轴次级电流。
25、进一步优选地,代价函数的表达式为:
26、g=(i1αref-i1α(t+1))2+(i1βref-i1β(t+1))2
27、其中,g表示代价函数值;i1αref和i1βref分别为αβ轴初级电流参考值i1αβref的α轴分量和β轴分量;i1α(t+1)和i1β(t+1)分别为αβ轴初级电流i1αβ(t+1)的α轴分量和β轴分量。
28、进一步优选地,上述当前控制周期t下直线感应电机的αβ轴初级电流i1αβ(t)和次级角速度ω2(t)的获取方式包括:
29、采集当前控制周期t下直线感应电机的相电流i1abc,并将其转换到αβ轴,得到αβ轴初级电流i1αβ(t);
30、采集当前控制周期t下直线感应电机的速度信号v2(t),并按照计算次级角速度ω2(t);
31、其中,τ表示直线感应电机的极距。
32、第四方面,本发明提供了一种直线感应电机的电流控制系统,包括:存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时执行本发明第三方面所提供的电流控制方法。
33、第五方面,本发明提供了一种直线感应电机系统,包括:
34、直线感应电机;
35、逆变器,其三相桥臂中点分别与直线感应电机的三相绕组相连;
36、以及本发明第四方面所提供的直线感应电机的模型预测电流控制系统,其与直线感应电机和逆变器分别相连。
37、总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
38、1、本发明提供了一种直线感应电机的励磁电感辨识方法,在每个控制周期内,以反电动势为观测量,通过构建基于滑模观测器的参考模型计算反电动势观测值,并借助于含有励磁电感的可调模型计算反电动势,通过描述励磁电感与反电势误差的自适应率计算相应的励磁电感,实现励磁电感的辨识。本发明构建了与励磁电感的变化量无关的参考模型,且采用滑模项代替电流微分项,消除了现有参考模型中电流微分项所造成的噪声,避免了电流噪声对反电势观测结果的干扰,提高了励磁电感辨识的准确性。
39、2、本发明所提供的直线感应电机的励磁电感辨识方法,在得到反电动势的观测值后,进一步对其采用多个级联、且相同的低通滤波器进行滤波处理后,对所得结果进行补偿,作为反电动势最终的观测值;该过程消除了滑模观测器固有的抖振问题,进一步提高了励磁电感辨识的准确性。
40、3、本发明提供了一种直线感应电机的电流控制方法,采用本发明第一方面所提供的励磁电感辨识方法辨识得到励磁电感观测值,能够实现励磁电感的准确辨识,进而提高了电流控制方法的参数鲁棒性和控制精度。
本文地址:https://www.jishuxx.com/zhuanli/20241106/322769.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。