应用于内窥镜蛇形臂体的拉力共轭锁定装置
- 国知局
- 2024-11-06 14:59:53
本发明涉及一种应用于狭小空间与复杂空间作业的、用于锁定拉力的机械装置,更特别地说,是指一种应用于内窥镜蛇形臂体的拉力共轭锁定装置。
背景技术:
1、内窥镜是一个配备有灯光的管子,它可以经口腔进入胃内或经其他天然孔道进入体内。利用内窥镜可以看到x射线不能显示的病变,因此它对医生非常有用。例如,借助内窥镜医生可以观察胃内的溃疡或肿瘤,据此制定出最佳的治疗方案。为了推进结肠镜(或内窥镜蛇形臂体)通过结肠,必须拉伸结肠壁,韧带和腹膜,从而在结肠壁中产生张力,从而抵抗进一步的壁变形。这种阻力迫使结肠镜弯曲并跟随结肠的曲线,这会导致插入困难和疼痛,仅通过推动动作推进内窥镜蛇形臂体可能会形成环路,从而难以进一步推进。
2、在医疗领域中,面向复杂受限空间的工具平台拥有高通过性与灵活度特性。但是,在狭小空间与复杂空间内作业,使用电机提供的推动力造成了内窥镜蛇形臂体的运动控制难度大,通过性和操作灵活性较差,加大了医生对内窥镜操作的难度。
技术实现思路
1、为了改善电机驱动带来的通过性和灵活性较差的技术问题,本发明设计了一种应用于内窥镜蛇形臂体的拉力共轭锁定装置。该拉力共轭锁定装置能够为内窥镜蛇形臂体提供纯机械动力,动力的大小通过操作者根据实际复杂受限空间环境的定。相较于传统电机的分段控制方式具有更高的通过性与操作灵活性。本发明拉力共轭锁定装置充分利用了操作者手臂的自由度,为复杂受限空间作业提供拉力、以及行进状态的锁定。
2、本发明拉力共轭锁定装置采用线驱动,对内窥镜蛇形臂体位移运动过程所需输出力能非常直观地观察到。它能够利用内窥镜蛇形臂体可变刚度的头部与身体,以软硬交替的方式在三维空间内固定一条通往作业区的非线性路径。采用拉力共轭锁定装置提供的输出力使得内窥镜蛇形臂体形成的工作管道对复杂受限空间具有很高的通过性。本发明利用自解耦的正交布局为内窥镜蛇形臂体设计了能够实现内外管绷紧与跛行运动模式灵活、快速切换的互锁装置。针对同一组控制线缆长度不可避免的微小变化,设计了具有“负行程”的分段力控制误差补偿机构。该机构的限制行程可以为内窥镜蛇形臂体的受控头部提供一定的柔性,增强了内窥镜蛇形臂体运动的安全性。
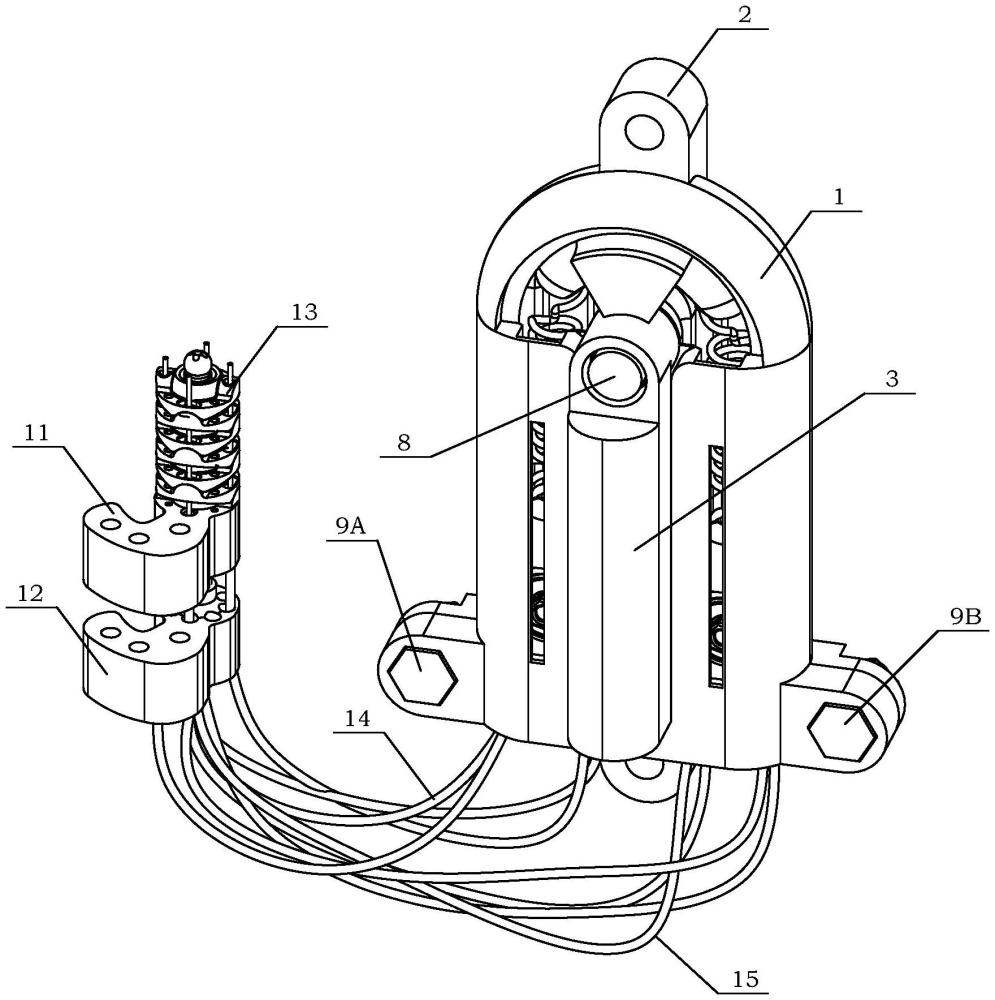
3、本发明的一种应用于内窥镜蛇形臂体的拉力共轭锁定装置,由互锁前盖(1)、互锁后盖(2)、手柄(3)、右弹簧(4)、右滑块(5)、左弹簧(6)、左滑块(7)组成。通过在右滑块(5)、左滑块(7)上连接控制线实现与内窥镜蛇形臂体的接线器连接。
4、手柄(3)上设有扇形体(3a)、圆柱段(3b)、握持段(3c)。手柄(3)的上端是扇形体(3a),扇形体(3a)的一侧是用于挂接右弹簧(4)上端的右端接口(3a1),扇形体(3a)的另一侧是用于挂接左弹簧(6)上端的左端接口(3a2)。
5、手柄(3)的圆柱段(3b)上设有轴承孔(3b 1),轴承孔(3b 1)内放置有深沟球轴承,且深沟球轴承套接在连接轴(8)上。通过连接轴(8)实现手柄(3)安装在互锁后盖(2)的内面板上。
6、手柄(3)的握持段(3c)用于操作者手握。
7、右弹簧(4)下端挂接在右滑块(5)的e横柱(5d)上,右滑块(5)两侧的滑轨在互锁后盖(2)的内面板上的滑道上运动。
8、左弹簧(6)下端挂接在左滑块(7)的g横柱(7d)上,左滑块(7)两侧的滑轨在互锁后盖(2)的内面板上的滑道上运动。
9、手柄(3)的握持段(3c)用于内窥镜手术过程中医生的手握持,医生的手在抓紧握持段(3c)后向左或向右旋拧所述的握持段(3c),使得手柄(3)绕连接轴(8)向左旋一位移完成左旋扭工作、或向右旋一位移完成右旋扭工作;在医生的手抓紧握持段(3c)进行一左旋扭→回位→一右旋扭→回位的操作下,实现对内窥镜蛇形臂体运动的控制。
10、本发明拉力共轭锁定装置在左旋扭与右旋扭组合的工作过程中,对蛇形软体(13)的一端进行扩张,另一端保持原状。
11、在本发明的技术方案中,采用左右位移互换,通过手柄(3)的扇形体(3a)两端分别挂接的直线位移组件(由弹簧与滑块组成),且使直线位移组件在前后盖组合的滑槽中上下移动,来控制作用到蛇形臂体上的输出力。由于蛇形臂体属于医疗内窥镜器件的作动件,其体积较小,输出力较难控制,采用多条导线与滑块连接能够实现缓慢较小力的输出,提高共轭锁定装置的位移精度。工作时,通过医生手握握持段(3c),在手术规划路径下完成蛇形臂体的精准前行。
技术特征:1.一种应用于内窥镜蛇形臂体的拉力共轭锁定装置,拉力共轭锁定装置通过控制线实现与内窥镜蛇形臂体的接线器连接;其特征在于:拉力共轭锁定装置由互锁前盖(1)、互锁后盖(2)、手柄(3)、右弹簧(4)、右滑块(5)、左弹簧(6)、左滑块(7)组成;
2.根据权利要求1所述的应用于内窥镜蛇形臂体的拉力共轭锁定装置,其特征在于:手柄(3)的握持段(3c)用于内窥镜手术过程中医生的手握持,医生的手在抓紧握持段(3c)后向左或向右旋拧所述的握持段(3c),使得手柄(3)绕连接轴(8)向左旋一位移完成左旋扭工作、或向右旋一位移完成右旋扭工作;在医生的手抓紧握持段(3c)进行一左旋扭→回位→一右旋扭→回位的操作下,实现对内窥镜蛇形臂体运动的控制。
3.根据权利要求1所述的应用于内窥镜蛇形臂体的拉力共轭锁定装置,其特征在于:左弹簧(6)与右弹簧(4)为串联形式分布在扇形体(3a)的两端;当扇形体(3a)朝一个方向滑动时会导致一端的弹簧绷紧与另一端弹簧的放松。
4.根据权利要求1所述的应用于内窥镜蛇形臂体的拉力共轭锁定装置,其特征在于:当拉力共轭锁定装置位于初始状态下,蛇形软体(13)由被拉伸的弹簧提供了一定的预紧力。
5.根据权利要求1所述的应用于内窥镜蛇形臂体的拉力共轭锁定装置,其特征在于:拉力共轭锁定装置用于为内窥镜的蛇形臂体提供工作状态的锁定与位置保持。
6.根据权利要求1所述的应用于内窥镜蛇形臂体的拉力共轭锁定装置,其特征在于:拉力共轭锁定装置在左旋扭与右旋扭组合的工作过程中,对蛇形软体(13)的一端进行扩张,另一端保持原状。
技术总结本发明公开了一种应用于内窥镜蛇形臂体的拉力共轭锁定装置,其由互锁前盖(1)、互锁后盖(2)、手柄(3)、右弹簧(4)、右滑块(5)、左弹簧(6)、左滑块(7)组成。通过在右滑块(5)、左滑块(7)上连接控制线实现与内窥镜蛇形臂体的接线器连接。本发明拉力共轭锁定装置能够为内窥镜蛇形臂体提供纯机械动力,动力的大小通过操作者根据实际复杂受限空间环境的定。相较于传统电机的分段控制方式具有更高的通过性与操作灵活性。本发明拉力共轭锁定装置充分利用了操作者手臂的自由度,为复杂受限空间作业提供拉力、以及行进状态的锁定。技术研发人员:裴旭,张皓楠,肖峰受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/324829.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。