基于PSD二维光学快速平动像移补偿方法、系统和设备与流程
- 国知局
- 2024-11-06 15:05:15
本技术涉及光学像移补偿,尤其涉及基于psd二维光学快速平动像移补偿。
背景技术:
1、长焦距相机在机载或船载环境下成像时,由于载体的姿态变化,大气气流扰动及振动等影响,曝光时刻的像会在焦平面上产生移动,导致成像模糊,影响分辨率和目标识别。在长焦距, ccd像元尺寸小,曝光时间长的相机上尤明显,通常航空摄影行业标准要求曝光时刻像移量不大于1个像元。为解决这一问题,长焦距相机通常是采用外框架陀螺机构来对扰动进行运动粗补偿, 再利用快速反射镜(fsm) 高带宽、响应快的特点,对粗补偿的陀螺残差进行精补偿。
2、使用快速反射镜(fsm)前提是长焦距光学镜头在光学设计时人为引出平行光路,这增加光学系统设计难度,占用了结构空间尺寸;同时快速反射镜的无接触式电涡流位置传感器的探头和信号处理板的尺寸很大,探头信号传输用的同轴线缆也占用空间尺寸,且传感器价格昂贵。
3、psd属于光敏感电子元器件,响应时间微秒级,位置分辨率小于1μm,位置精度也达到μm级,输出的模拟信号可实现上百khz采样频率,且位置测量结果与光斑形状无关,只与光斑重心位置有关,且成本低,被广泛应用在精密仪器测量中。但psd信号提取属于弱信号提取,信号噪声干扰多,对信号的提取放大、解算、滤波和标定要求高,否则会导致位置测量结果出现偏差。
技术实现思路
1、本发明目的是为了解决现有基于psd的光学像移补偿系统的位置测量结果偏差较大的问题,并可替代快速反射镜(fsm)像移补偿方式,提供了基于psd二维光学快速平动像移补偿方法、系统和设备。
2、本发明是通过以下技术方案实现的,本发明一方面,提供一种基于psd二维光学快速平动像移补偿方法,所述方法是基于无接触光电位移测量装置进行平动像移补偿,所述无接触光电位移测量装置包括半导体激光器模组和一维psd器件;
3、一维psd器件的数量为2个,分别为x轴和y轴一维psd器件,设置在透镜运动方向分别平行于x轴和y轴,不随透镜一起运动;
4、半导体激光器模组的数量为2个,分别与x、y轴的一维psd器件配合使用,随透镜一起运动,当装置处于静止时, 2个半导体激光器模组发出的光束垂直照射到对应一维psd器件的感光面中心位置;
5、所述方法具体包括:
6、步骤1、半导体激光器模组发出光束,垂直照射到对应轴的一维psd器件感光面上,光斑在该轴一维psd器件上产生光电模拟信号;
7、步骤2、将光电模拟信号放大并转换为数字信号;
8、步骤3、根据转换后的数字信号,进行位置解算、滤波和拟合修正,获取最终的光斑位置信息;
9、步骤4、对外框架陀螺残差值做积分运算,把角速度之差转换为角度差值,将角度差值转换为弧度差值,然后乘以成像系统焦距值获取需补偿的直线位移量;
10、步骤5、将某一轴的直线位移量作为给定值,该轴拟合后光斑位置信息作为反馈值,将反馈值与给定值实时进行差值比较,根据差值正负与大小控制透镜做沿x、y轴二维高速直线平动运动来补偿像移量,当差值为零时像移量补偿完毕透镜停止运动。
11、进一步地,步骤3中,所述位置解算具体包括:
12、对于某一轴的一维psd器件的光斑位置信息,通过相对该轴psd中心位置的光斑偏移位置得到的,计算公式为:
13、
14、其中,和是对应轴一维psd两端电极的光电流信号转换的ad码值,s为该轴psd器件有效感光面有效长度一半,计算出的相对该轴psd中心位置的偏移量即为光斑位置信息。
15、进一步地,步骤3中,对光斑位置信息进行滤波处理,所述滤波具体包括:
16、利用iir低通滤波器重复迭代去除光斑位置信息中的高频噪声,迭代过程如下:
17、(1)
18、(2)
19、(3)
20、其中,是滤波系数,0<<1,是滤波后的位置信号,迭代计算用到的旧光斑位置值信息,计算是迭代用的新光斑位置值信息,迭代过程为公式(1)、(2)、(3)顺序反复执行。
21、进一步地,步骤3中,所述拟合修正是滤波后的位置信号经过高精度激光位置传感器对n个位置标定修正后生成的,具体为:
22、在透镜上固定一个接收面与x、y轴的方向垂直的金属立方体,该立方体与透镜一起运动;
23、当某一轴的音圈电机驱动透镜带动立方体移动时,通过平行该轴放置的激光位置传感器测量立方体的实际位移量,来修正并拟合psd解算的光斑位置信息,某一轴的整个行程范围分成n等份,每等份的步长为总行程除以n的距离,既每个行程依照光斑位置值依次走、、…,其中以位置为测量起始点零位,同时采集对应的n个位置的高精度激光位置传感器值、、…,获得两组数后,获取拟合后最终生成的光斑位置信息。
24、进一步地,步骤3中,所述拟合修正的公式为:
25、
26、其中,为拟合后最终生成的光斑位置信息,作为控制系统位置反馈使用,是滤波后的光斑位置信息,a、b和c是二项式拟合参数。
27、进一步地,步骤4中,某一轴的直线位移量计算公式为:
28、
29、其中,为某一轴给定惯性空间角速度给定值,单位为°/s,为该轴的陀螺实际反馈角速度值,单位为°/s,为控制系统控制周期,为相机焦距长度,57.3为角度弧度转换系数。
30、进一步地,一维psd器件感光面长度不小于对应轴上透镜的有效行程。
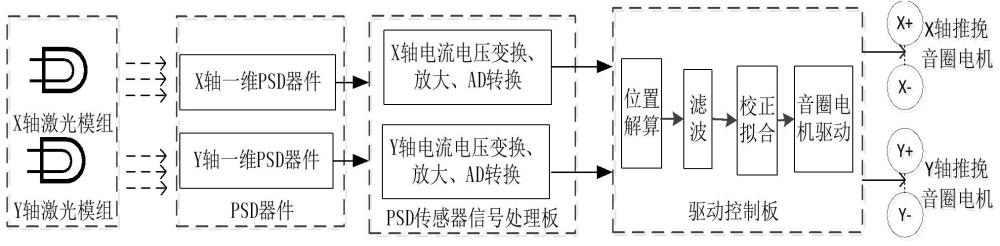
31、第二方面,本发明提供一种基于psd的二维光学快速平动像移补偿系统,所述系统包括无接触光电位移测量装置、psd传感器信号处理板、驱动控制板和推挽音圈电机;
32、所述无接触光电位移测量装置包括半导体激光器模组和一维psd器件;
33、一维psd器件的数量为2个,分为x轴和y轴一维psd器件,设置在透镜运动方向分别平行于x轴和y轴,不随透镜一起运动;
34、半导体激光器模组的数量为2个,分别与x、y轴的一维psd器件配合使用,随透镜一起运动,设置位置是当装置处于静止时,使2个半导体激光器模组发出的光束垂直照射到对应一维psd器件的感光面中心位置,光斑在psd上产生光电模拟信号,利用该信号可解算出光斑相对psd感光面中心位置信息;
35、psd传感器信号处理板为2个,分为x轴和y轴的psd传感器信号处理板,用于将x轴和y轴的光位置模拟信号放大,转换为数字信号并发送至驱动控制板;
36、驱动控制板用于根据x轴和y轴转换后数字信号,进行光斑位置解算、滤波和拟合修正,获取最终x轴和y轴的光斑位置信号,并驱动推挽音圈电机带动透镜做二维直线运动;
37、推挽音圈电机的数量为4个,其中x轴2个,y轴2个,以透镜为中心设置在透镜两端,分别平行于透镜x和y轴移动方向。
38、第三方面,本发明提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,当所述处理器运行所述存储器存储的计算机程序时执行如上文所述的一种基于psd的二维光学快速平动像移补偿方法的步骤。
39、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质中存储有多条计算机指令,所述多条计算机指令用于使计算机执行如上文所述的一种基于psd的二维光学快速平动像移补偿方法。
40、本发明的有益效果:
41、psd全称position sensitive detector,即位置敏感探测器,是一种与光源组合使用,用于检测光斑精确位置的光电器件,本发明原理是利用psd作为位置检测元件,控制光学透镜快速沿x,y轴二维直线平动补偿像移。当长焦距光学相机在机载或船载环境下成像时, 由于相机曝光时载体的晃动、风的扰动和载体振动等影响,像会在焦平面上产生移动导致成像模糊,在长焦距或长曝光时间下尤为明显,解决方法通常是采用外框架陀螺机构对x,y轴扰动进行运动粗补偿,再利用快速反射镜(fsm)对粗补偿的x,y轴陀螺残差进行精补偿。引入快速反射镜需要光学镜头在设计时引出平行光路,增加光学设计难度,光路变复杂;同时快速反射镜的无接触式电涡流位置传感器和信号处理板尺寸大,成本高。
42、本发明利用psd器件和半导体激光模组组合成无接触位置传感器,根据外框架陀螺残差值,控制推挽音圈电机带动透镜二维快速直线平动补偿像移的技术,相比于传统的快速反射镜设计方法,它的优点有两个:1) 高速直线透镜平动运动代替反射镜的转动运动,无需特别设计平行光路,光学设计简单;2)psd位置传感器代替电涡流传感器,成本低尺寸小,整体结构紧凑。
43、本发明适用于结构尺寸要求严格,光学设计简单的长焦距光电成像设备的二级像移补偿系统。由于载体振动、大气扰动和姿态变化等扰动影响,陀螺补偿机构不能完全补偿扰动引起的像移,需要引入二级像移补偿系统进一步稳像。
本文地址:https://www.jishuxx.com/zhuanli/20241106/325220.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表