简化S型轨迹规划方法及运动控制设备与流程
- 国知局
- 2024-11-18 18:15:09
本发明涉及运动控制,具体而言,涉及一种简化s型轨迹规划方法及运动控制设备。
背景技术:
1、运动控制设备的残留振动抑制一直是振动抑制的热点研究方向,其目的是使被控设备平稳到达,消除末端惯性。常见的振动抑制包括以下途径:轨迹优化、柔性力控及输入整形等。
2、对于一般运动控制工业设备,由于对控制成本较为敏感,多采用低成本控制器,存在算力较低、基础函数模型不完善等多种情况。然而基于迭代计算的轨迹规划对算力及底层计算库要求都比较高,导致基于低成本控制器的振动抑制效果不理想。
技术实现思路
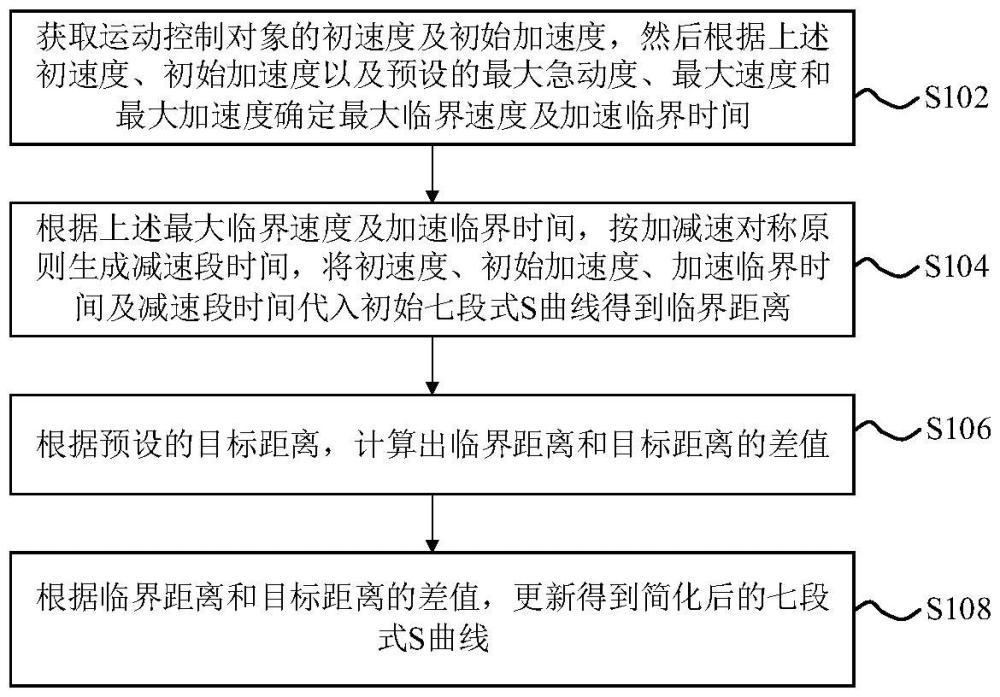
1、本发明实施例提供一种简化七段式s曲线的规划方法,所述方法包括:获取运动控制对象的初速度及初始加速度,根据所述初速度、所述初始加速度以及预设的最大急动度、最大速度和最大加速度确定最大临界速度及加速临界时间;根据所述最大临界速度及所述加速临界时间,按加减速对称原则生成减速段时间,将所述初速度、所述初始加速度、所述加速临界时间及所述减速段时间代入初始七段式s曲线得到临界距离;根据预设的目标距离,计算出所述临界距离和所述目标距离的差值;根据所述临界距离和所述目标距离的差值,更新得到简化后的七段式s曲线。
2、本发明实施例提供的简化七段式s曲线的规划方法,可以基于初始的七段式s曲线进行简化轨迹规划,实现快捷的各段时间规划,采用简化s型轨迹规划对系统要求较低且对算力要求也比较低,能够很好的落实推广,将上述s曲线规划时间代入输入整形算法生成整形后的输出轨迹,具有很好的振动抑制效果,可以提高低成本控制器的振动抑制效果。
3、可选地,所述根据所述临界距离和所述目标距离的差值,更新得到简化后的七段式s曲线,包括:若所述临界距离大于所述目标距离,则根据所述临界距离与所述目标距离的比例缩减临界时间;在执行所述缩减临界时间的步骤至所述临界距离等于所述目标距离时,则根据缩减后的临界时间确定简化后的七段式s曲线;其中,所述临界时间包括加速临界时间及减速段时间;若所述临界距离小于所述目标距离,则根据所述临界距离与所述目标距离的差值增加曲线的匀加速段时间或匀速段时间,以补偿所述临界距离与所述目标距离的差值;在执行所述增加匀加速段时间或匀速段时间的步骤至所述临界距离等于所述目标距离时,则根据增加后的匀加速段时间或匀速段时间确定简化后的七段式s曲线。
4、本发明实施例具体采用简易的临界对比+时间比例调整的方法实现快速非零起的s型轨迹曲线规划,提高了低成本控制器的控制性能,有利于实现控制推广。
5、可选地,所述根据所述临界距离与所述目标距离的比例缩减临界时间,包括:将缩减后的临界时间代入所述初始七段式s曲线得到更新后的临界距离;若所述更新后的临界距离大于所述目标距离,则根据所述更新后的临界距离与所述目标距离的比例继续缩减所述缩减后的临界时间;若所述更新后的临界距离小于所述目标距离,则根据所述更新后的临界距离与所述目标距离的差值增加曲线的匀速段时间。
6、本发明实施例中进行比例调整后,若临界距离小于目标距离则可以进一步增加匀速段时间,实现轨迹曲线规划。
7、可选地,所述根据所述临界距离与所述目标距离的差值增加曲线的匀加速段时间或匀速段时间,以补偿所述临界距离与所述目标距离的差值,包括:在所述最大临界速度小于所述最大速度的情况下,根据所述最大临界速度与所述最大速度的差值增加轨迹曲线的匀加速段时间至达到所述最大速度,以及根据增加的匀加速段时间计算增加的距离;若所述增加的距离小于所述临界距离与所述目标距离的差值,根据所述临界距离和所述增加的距离计算得到更新后的临界距离;若所述增加的距离大于所述临界距离与所述目标距离的差值,根据所述增加的距离与所述差值的比例缩减所述匀加速段时间,再根据缩减后的匀加速段时间计算得到更新后的临界距离;在所述更新后的临界距离小于所述临界距离的情况下,则根据所述更新后的临界距离与所述目标距离的差值增加曲线的匀速段时间,以补偿所述临界距离与所述目标距离的差值。
8、本发明实施例中具体增加匀加速段还是匀速段的时间,需要考虑最大临界速度与预设的最大速度的关系,灵活地进行轨迹曲线规划。
9、可选地,所述根据所述临界距离与所述目标距离的差值增加曲线的匀加速段时间或匀速段时间,以补偿所述临界距离与所述目标距离的差值,包括:若所述最大临界速度大于或等于所述最大速度,则增加所述匀速段时间,以补偿所述临界距离与所述目标距离的差值。
10、本发明实施例中具体增加匀加速段还是匀速段的时间,需要考虑最大临界速度与预设的最大速度的关系,灵活地进行轨迹曲线规划。
11、可选地,所述根据所述初速度、所述初始加速度以及预设的最大急动度、最大速度和最大加速度确定最大临界速度及加速临界时间,包括:若所述初速度小于所述最大速度,且所述初始加速度小于所述最大加速度,则以所述最大加速度为临界条件计算仅包括加速度增加段、加速度减速段的曲线的加速临界时间,以及以所述最大速度为临界条件计算仅包括加速度增加段、加速度减速段的曲线的加速临界时间,根据两个所述加速临界时间中较小的一个,计算得到最大临界速度;若所述初速度小于所述最大速度,且所述初始加速度大于或等于所述最大加速度,则计算仅包括加速度减速段的轨迹的加速临界时间;以及,根据所述加速临界时间计算得到最大临界速度。
12、本发明实施例中针对非零起的s型曲线规划,结合运动控制对象的初速度及初始加速度,在以预设的最大急动度、最大速度和最大加速度为限制条件的情况下,规划s型曲线的加速阶段。
13、可选地,所述根据所述初速度、所述初始加速度以及预设的最大急动度、最大速度和最大加速度确定最大临界速度及加速临界时间,包括:若所述初速度大于或等于所述最大速度,且所述初始加速度大于等于零,则计算仅包括所述加速度减速段的轨迹的加速临界时间,并根据所述加速临界时间计算得到最大临界速度;若所述初速度大于或等于所述最大速度,且所述初始加速度小于零,则比较所述初始加速度升至零时的速度与所述最大速度,当所述初始加速度升至零时的速度大于或等于所述最大速度时,则以所述初始加速度升至零时的速度为最大临界速度、以所述初始加速度升至零的时间作为所述加速度减速段的轨迹的加速临界时间,当所述初始加速度升至零时的速度小于所述最大速度时,以对称的所述加速度增加段、所述加速度减速段补偿至所述最大速度,得到加速临界时间及最大临界速度。
14、本发明实施例中针对非零起的s型曲线规划,结合运动控制对象的初速度及初始加速度,在以预设的最大急动度、最大速度和最大加速度为限制条件的情况下,规划s型曲线的加速阶段。
15、可选地,所述方法还包括:在所述运动控制对象根据所述简化后的七段式s曲线运行的情况下进行震荡识别得到震荡曲线,输出所述震荡曲线的阻尼比及无阻尼固有频率,以及生成输入整形脉冲;对所述简化后的七段式s曲线及所述输入整形脉冲进行拉普拉斯卷积,生成整形后的输出轨迹。
16、本发明实施例提供一种运动控制设备,包括控制器;所述控制器用于执行上述任一项所述的方法。
17、本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现上述任一项所述的方法。
18、本发明实施例提供的运动控制设备、计算机可读存储介质,可以实现与前述简化七段式s曲线的规划方法相同的技术效果。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327804.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表