一种大陡度光学元件表面面形的测量方法
- 国知局
- 2024-11-18 18:17:16
本发明属于光学检测,具体涉及一种大陡度光学元件表面面形的测量方法。
背景技术:
1、大陡度光学元件作为一类特殊的非球面光学元件,被广泛应用于武器系统、高性能光学系统、航空航天等多个领域。如高陡度光学元件共形整流罩可以大幅降低导弹的飞行阻力,同时改善周围的空气流场,减小高速摩擦产生的热量,从而提高飞行速度、提高命中精度。
2、与常规光学元件相比,大陡度光学元件最为显著的特点是具有大高径比,即纵向高度l与口径d的比值较大,所以导致其纵向截面轮廓的陡度较大,往往超过70°,甚至达到90°。同时,对于这类高陡度光学元件的表面面形精度要求已达到亚微米级水平,为保证其制造精度与使役性能,需要对其面形精度进行高精度测量。
3、对于高陡度光学表面面形的测量方式,目前主要分为接触式测量与非接触式测量两大类。接触式测量方法主要基于高精度的测量设备,利用探针在被测量表面进行接触式打点采样。接触式测量由于测量时需对被测表面施加一定的接触压力,因此易对表面产生损伤,且测量效率较低。非接触式测量方法中除单点扫描法以外的方法均存在标定过程复杂、检测动态范围小和对待测面性质要求严格等问题,不适用于高陡度表面面形的测量。
4、单点扫描测量法通过高精度距离传感器采集被测光学元件表面数据,是解决高陡度面形测量的有效手段。但高精度传感器普遍存在量程小、测量范围小的限制。如何以小量程传感器测量大陡度表面,是高陡度光学表面点扫描测量所必须解决的问题。如专利cn201611064615.6借助高精度旋转轴与线性轴的联动来实现传感器对于被测表面的单点扫描测量,但是该方法的测量范围小。
技术实现思路
1、针对现有技术中的问题,本发明提供一种大陡度光学元件表面面形的测量方法。
2、为了实现上述目的本发明采用以下技术方案:
3、一种大陡度光学元件表面面形的测量方法,包括以下步骤:
4、(1)对被测工件调心调平;
5、(2)标定初始位置;
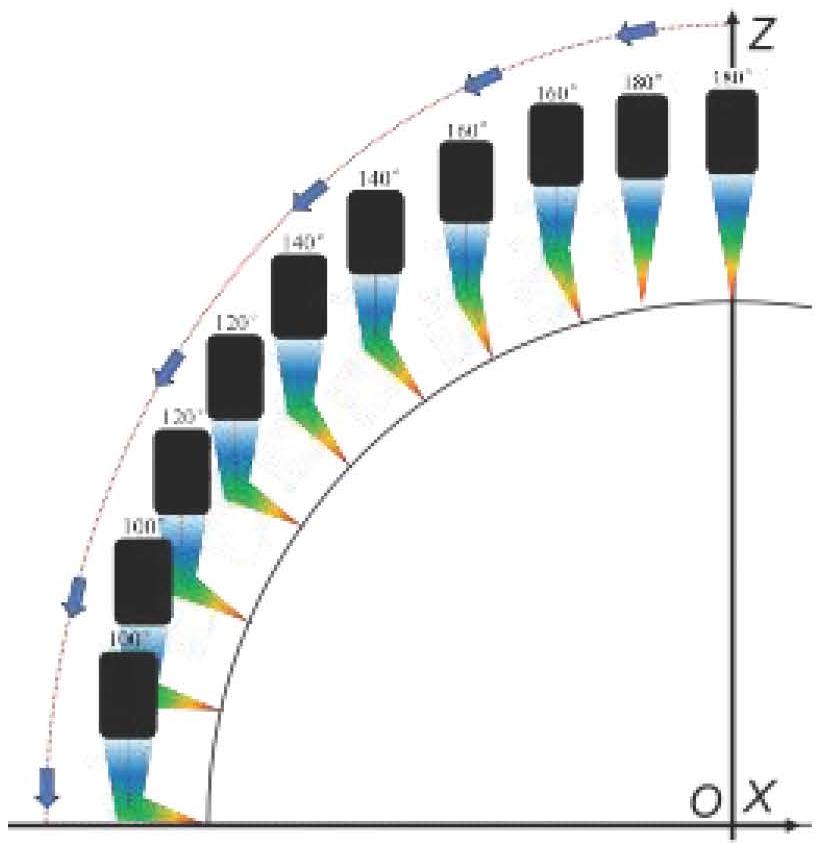
6、(3)将被测面母线分为多个区域;移动对应倾角的反射镜组,适配合适角度的反射镜到色散共焦传感器测量光路;传感器模组移动到轨迹中的预设位置,持续转动被测工件,使传感器模组实现整圈轮廓的测量并保存数据;
7、(4)全部轮廓测量完成,输出测量结果,各个轴和传感器模组恢复到初始安全状态;
8、所述反射镜组设于色散共焦传感器的测量光路中,包括一个倾角为90°的标定反射镜和多个倾角φ依次减小的反射镜,传感器的测量光束经倾角为φ的反射镜偏折后,测量曲面的斜率范围为[170°-2φ,190°-2φ]。
9、进一步地,每个反射镜最小长度尺寸l为:
10、
11、其中,x1为色散共焦传感器的出瞳直径,x2为光轴与反射镜上边缘的交点到传感器镜头端面的距离,x3为传感器最小工作距离,x4为传感器最大工作距离,φ为反射镜倾角。
12、进一步地,所述反射镜组包括5个反射镜,倾角φ依次为90°、80°、70°、60°、50°,传感器下方测量曲面的斜率范围为[0°,90°]。
13、进一步地,被测面母线分为[0°,10°]、[10°,30°]、[30°,50°]、[50°,70°]、[70°,90°]五个区域。
14、进一步地,对被测工件调心调平的具体过程为:以工件的法兰为基准,通过调心调平平台调整工件位姿,通过高精度光栅式位移传感器示数的变化判断工件状态,当数据偏差在亚微米范围内,即完成了对被测工件的调心调平。
15、进一步地,所述反射镜组和色散共焦传感器设于四轴系统中,包括相互垂直的三个线性轴和一个旋转轴,其中,x轴与z轴为线性轴,带动色散共焦传感器模组运动到预设轨迹中的相应位置;y轴为线性轴,在不同斜率范围的曲面区域内移动对应倾角的反射镜到色散共焦传感器光路中,对测量光路实现相应角度的偏折;c轴为旋转轴,用于旋转被测工件。
16、本发明有益效果:
17、本发明基于色散共焦传感器的高精度测量能力,通过设计一组不同倾角的反射镜来扩展色散共焦传感器的测量范围,通过移动对应角度的反射镜(0-10°)时不用反射镜,可直接测量到传感器下方即可满足测量斜率为[0°,90°]范围内的曲面。本发明测量方法避免了传感器在测量过程中绕被测件轮廓母线法向的旋转,引入的误差源更少,降低了误差监测要求,扩大了测量范围,同时该测量装置具有更简单的机械结构。
技术特征:1.一种大陡度光学元件表面面形的测量方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的大陡度光学元件表面面形的测量方法,其特征在于,每个反射镜最小长度尺寸l为:
3.根据权利要求2所述的大陡度光学元件表面面形的测量方法,其特征在于,所述反射镜组包括5个反射镜,倾角φ依次为90°、80°、70°、60°、50°,传感器下方测量曲面的斜率范围为[0°,90°]。
4.根据权利要求3所述的大陡度光学元件表面面形的测量方法,其特征在于,被测面母线分为[0°,10°]、[10°,30°]、[30°,50°]、[50°,70°]、[70°,90°]五个区域。
5.根据权利要求4所述的大陡度光学元件表面面形的测量方法,其特征在于,对被测工件调心调平的具体过程为:以工件的法兰为基准,通过调心调平平台调整工件位姿,通过高精度光栅式位移传感器示数的变化判断工件状态,当数据偏差在亚微米范围内,即完成了对被测工件的调心调平。
6.根据权利要求1-5任一所述的大陡度光学元件表面面形的测量方法,其特征在于,所述反射镜组和色散共焦传感器设于四轴系统中,包括相互垂直的三个线性轴和一个旋转轴,其中,x轴与z轴为线性轴,带动色散共焦传感器模组运动到预设轨迹中的相应位置;y轴为线性轴,在不同斜率范围的曲面区域内移动对应倾角的反射镜到色散共焦传感器光路中,对测量光路实现相应角度的偏折;c轴为旋转轴,用于旋转被测工件。
技术总结本发明属于光学检测技术领域,公开了一种大陡度光学元件表面面形的测量方法,包括(1)对被测工件调心调平;(2)标定初始位置;(3)将被测面母线分为多个区域;移动对应倾角的反射镜组,适配合适角度的反射镜到色散共焦传感器测量光路;传感器模组移动到轨迹中的预设位置,持续转动被测工件,使传感器模组实现整圈轮廓的测量并保存数据;(4)全部轮廓测量完成,输出测量结果,各个轴和传感器模组恢复到初始安全状态。本发明通过设计一组反射镜来扩展色散共焦传感器的测量范围,避免了传感器在测量过程中绕被测件轮廓母线法向的旋转,引入的误差源更少,降低了误差监测要求,同时本发明具有更简单的机械结构。技术研发人员:王伟,杨志鹏,徐敏受保护的技术使用者:复旦大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/328056.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表