一种角反射器千分之一像素提取方法与流程
- 国知局
- 2024-11-18 18:16:40
本发明属于卫星测量,特别是涉及一种角反射器千分之一像素提取方法。
背景技术:
1、合成孔径雷达(sar)卫星以其独特的全天时全天候对地成像能力,在自然资源管理、应急减灾等领域发挥着不可替代的作用。为了确保sar卫星成像的高质量和精确性,卫星发射后需使用地面角反射器(cr)进行几何检校,使卫星的平面定位精度达到极高水平。其中,sar影像中角反射器坐标的精确提取是几何检校、干涉测量检校和形变监测等研究的基础。
2、角反射器以其独特的几何结构和强回波特性,在sar影像中表现为高信噪比的亮点,易于识别和定位。然而,尽管在角反射器的设计研究方面,如反射器表面的选材、设计工艺、制造公差和角度精确度等方面取得了一定进展,但关于角反射器精确提取技术的研究仍显不足,特别是缺乏能够达到千分之一像素级精度的提取技术。
3、当前,角反射器的提取主要依赖于其在图像中产生的强烈回波信号与周围地貌的较弱回波之间的对比。常用的方法包括通过窗口模板识别和匹配图像中的角反射器,并计算相关系数来确定其精确位置。尽管这种方法计算效率高,但其精度通常受限于像素级别。另一种技术则通过计算角反射器周围窗口内的相干系数和振幅差异来识别反射器点,尽管这种方法具有较高的精度,但处理庞大的数据量导致其成本高昂。
4、基于星地位置数学模型的角反射器粗识别方法,结合角反射器的强回波特性,虽能确定角反射器的大致范围,但sar系统成像过程中存在的误差会导致粗识别偏移量过大,受周围地物影响增加,限制了角反射器点提取的准确度。
5、此外,现有技术普遍缺乏有效的质量评估和校验手段,难以准确评价提取结果的准确性。这在高精度的地形测绘中可能导致显著的解算误差。
6、因此,为了克服上述技术的不足,本发明提出了一种角反射器千分之一像素提取的方法,旨在提供任一角反射器的大地坐标,通过技术解算出角反射器的千分之一像素级坐标,为角反射器相位中心的精确提取、几何检校和干涉测量检校提供强有力的技术支撑。
技术实现思路
1、为解决上述技术问题,本发明提供了一种角反射器千分之一像素提取的方法,对于角反射器来说,可使其像素定位精度达到千分之一像素。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明为一种角反射器千分之一像素提取方法,包括以下步骤:
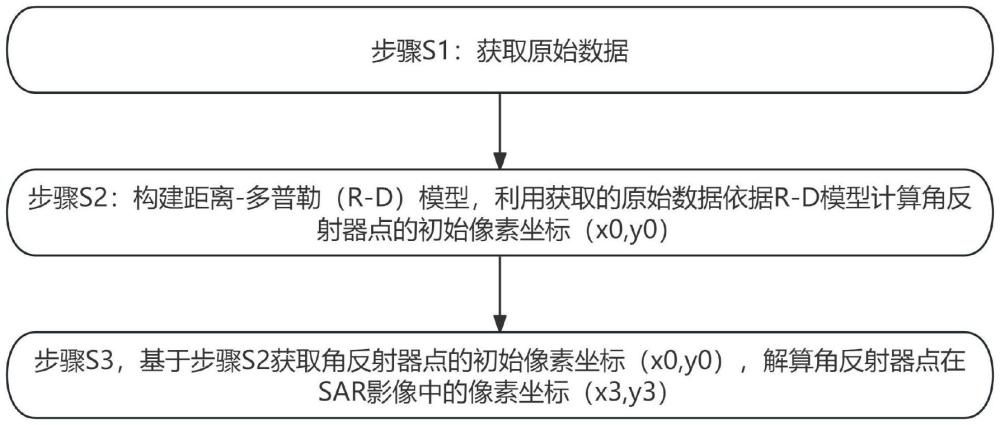
4、步骤s1:获取原始数据,所述原始数据包括角反射器点的大地坐标、sar影像及所述sar影像的成像参数;
5、步骤s2:构建距离-多普勒(r-d)模型,利用获取的原始数据依据r-d模型计算角反射器点的初始像素坐标(x0,y0);
6、步骤s3,基于步骤s2获取角反射器点的初始像素坐标(x0,y0),解算角反射器点在sar影像中的像素坐标(x3,y3)。
7、作为本发明的一种优选技术方案,所述步骤s2具体包括以下子步骤:
8、步骤s2.1:将角反射器点的大地坐标转换到地心空间直角坐标系;
9、步骤s2.2:通过sar卫星状态矢量拟合卫星轨道,获取任意时刻的sar卫星状态矢量;
10、步骤s2.3:计算影像上角反射器点的方位向成像时间t,具体为根据起始时间和时间采样间隔以及角反射器点在sar影像上的行号计算,公式为:t=t0+ti·i;
11、步骤s2.4:构建r-d模型;
12、步骤s2.5:利用牛顿迭代法求解r-d模型,求解角反射器点的初始像素坐标(x0,y0)。
13、作为本发明的一种优选技术方案,所述步骤s2.1中的大地坐标到地心空间直角坐标的转换采用的转换公式为:
14、
15、作为本发明的一种优选技术方案,所述步骤s2.2中的卫星轨道拟合采用多项式拟合,具体的,所述多项式为:
16、
17、作为本发明的一种优选技术方案,所述步骤s2.4中的r-d模型如下:
18、距离方程:
19、多普勒方程:
20、地球椭球方程:
21、作为本发明的一种优选技术方案,步骤s3具体包括以下子步骤:
22、步骤s3.1,以步骤s2获取的角反射器点的初始像素坐标(x0,y0)为中心,选取窗口大小为n1×n1的复数矩阵;
23、步骤s3.2,计算所述的n1×n1的复数矩阵的幅度值,得到其幅度值矩阵;具体的,依据下式计算幅度值:
24、
25、其中,re(i,j)表示像元值(i,j)的实部,im(i,j)表示像元值(i,j)的虚部;
26、步骤s3.3,找到步骤s3.2所述的幅度值sig(i,j)最大时,其对应的像素坐标为(x1,y1);
27、步骤s3.4,以步骤s3.3所述的像素坐标(x1,y1)为中心,选取窗口大小为2n2×2n2的复数矩阵;
28、步骤s3.5,对窗口大小为2n2×2n2的复数矩阵进行m1倍升采(m1<1024),得到升采样并重构后的复数矩阵;
29、步骤s3.6,计算升采样并重构后的复数矩阵的幅度值,得到其幅度值矩阵sig1(i,j);
30、步骤s3.7,找到步骤s3.6所述的幅度值最大时,其对应的像素坐标为(x2,y2);
31、步骤s3.8,对像素坐标x2所在行(即距离向)的幅度值进行m2倍升采样,得到一维复数矩阵dx2,对像素坐标y2所在列(即方位向)的幅度值进行m2倍升采样,得到一维复数矩阵dy2;
32、步骤s3.9,计算一维复数矩阵dx2的幅度值矩阵为一维复数矩阵dy2的幅度值矩阵为
33、步骤s3.10,计算幅度值矩阵与的分贝(db)值,分别为和具体的,依据下式计算分贝值:
34、
35、其中,max(*)表示该幅度值矩阵中最大幅度值;
36、步骤s3.11,取距离向db值左边3db至右边3db位置的所有db值构成新的矩阵
37、步骤s3.12,依据距离向db值的像素坐标及db值进行三角函数拟合;
38、步骤s3.13,找到的峰值点对应的坐标及拟合值对应的坐标,并判断峰值点对应的坐标x3与拟合值对应的坐标x'3差值的绝对值达到1/1000量级,输出距离向峰值点对应的坐标x3;
39、步骤s3.14,方位向db值重复s3.11-s3.13,输出方位向峰值点对应的坐标y3。
40、作为本发明的一种优选技术方案,所述步骤s3.5具体包括以下子步骤:
41、步骤s3.5.1,对s3.4得到的复数矩阵进行二维快速傅里叶变换,将其转换到频率域;
42、步骤s3.5.2,对转到频率域的复数矩阵进行m1倍升采样,得到升采样后的复数矩阵
43、步骤s3.5.3,利用二维傅里叶逆变换重构升采样后的复数矩阵得到重构后的复数矩阵d2[m1×2n2,m1×2n2]。
44、作为本发明的一种优选技术方案,所述步骤s3.52具体包括以下子步骤:
45、步骤s3.5.2.1,计算步骤s3.5.1得到的复数矩阵d2[m1×2n2,m1×2n2]的幅度值并计算每一列的幅度值之和得到矩阵tmprow(i,1);
46、步骤s3.5.2.2,找到步骤s3.5.2.1tmprow(i,1)中最小值所在的行号i1;
47、步骤s3.5.2.3,构建二维零矩阵o1[(m1-1)×2n2,2n2];
48、步骤s3.5.2.4,将步骤s3.5.2.3得到的二维零矩阵
49、o1[(m1-1)×2n2,2n2]插入sigd2(i,j)中第i1+1行,并得到矩阵
50、步骤s3.5.2.5,对步骤s3.5.2.4矩阵计算每一行的幅度值之和得到矩阵tmpcol(1,j);
51、步骤s3.5.2.6,找到步骤s3.5.2.5矩阵中最小值所在的列号j1;
52、步骤s3.5.2.7,构建二维零矩阵o2[m1×2n2,(m1-1)×2n2];
53、步骤s3.5.2.8,将步骤s3.5.2.7得到的二维零矩阵
54、o2[m1×2n2,(m1-1)×2n2]插入中第j1+1列,并得到矩阵上述八个子步骤的处理过程即完成第一次m1倍升采样。
55、作为本发明的一种优选技术方案,所述步骤s3.8具体包括以下子步骤:
56、步骤s3.8.1,确定升采样的因子m2;具体的,依据如下的公式确定m2:
57、m2=1024/m1
58、步骤s3.8.2,对像素坐标x2所在行(即距离向)的幅度值进行m2倍升采样,得到一维复数矩阵dx2,对像素坐标y2所在列(即方位向)的幅度值进行m2倍升采样,得到一维复数矩阵dy2。
59、作为本发明的一种优选技术方案,所述步骤s3.8.2具体包括以下子步骤:
60、步骤s3.8.2.1,构建一维零矩阵,并确定一维零矩阵o的大小n3;具体的,依据式(10)确定n3
61、n3=(2n2×m1)×m2
62、=1024*2n2
63、步骤s3.8.2.2,对像素坐标x2所在行(即距离向)的幅度值进行频谱中心化处理,然后对频谱中心化处理后的幅度值进行快速傅里叶变换,最后再进行频谱中心化处理;这样处理是为了使得频谱的低频部分位于数组的开始部分,高频部分位于数组的末尾;
64、步骤s3.8.2.3,将步骤s3.8.2.2得到的结果赋值给零矩阵o3的范围内,得到赋值后的矩阵dx2;
65、步骤s3.8.2.4,对步骤s3.8.2.3赋值后的dx2首先进行频谱中心化处理,然后进行快速傅里叶逆变换,最后再进行频谱中心化处理;这个操作确保了最终结果的格式与原始信号一致;
66、步骤s3.8.2.5,上述四个子步骤的处理过程即完成对像素坐标x2所在行(即距离向)的幅度值进行m2倍升采样;方位向的幅度值重采样重复步骤s3.8.2.1-步骤s3.8.2.5。
67、本发明具有以下有益效果:
68、1、大大提高了角反射器定位的精确度;
69、2、提高sar卫星成像质量:通过精确提取角反射器坐标,该技术能够提升sar卫星的成像质量,这对于自然资源管理、应急减灾等领域的应用至关重要;
70、3、增强定位准确性:该方法通过创新的算法和数据处理技术,能够提供更高的定位准确性,减少因人工刺点导致的误差;
71、4、支持高精度应用:该技术特别适用于需要高精度角反射器定位的应用场景,如卫星几何检校、干涉测量检校和形变监测等;
72、5、降低误差影响:与现有技术相比,该发明在减少因角反射器提取误差带来的影响方面具有显著优势,尤其是在高精度地形测绘等应用中;
73、6、提高数据处理效率:不仅提高了解算精度,而且该方法在数据处理效率方面也进行了优化,相较于现有技术,能够更高效。
74、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327975.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种肉类蒸煮损失测定装置
下一篇
返回列表