一种织物检测的三维力双模式柔性应变传感器
- 国知局
- 2024-11-18 18:15:08
本发明涉及柔性传感器领域,具体涉及一种织物检测的三维力双模式柔性应变传感器。
背景技术:
1、随着移动网络和智能设备的快速进步,可穿戴技术市场呈现出巨大的发展潜力。在这样的趋势下,柔性传感器因其在提升人机交互体验和可穿戴设备性能方面的显著优势,吸引了众多科研工作者的注意。这些传感器使用柔韧材料制造,具备高度的敏感性、迅速的响应时间和极佳的穿戴舒适度,已经在多个领域,如可穿戴监测设备、自修复电子皮肤和可弯曲触控屏等,发挥了重要作用。
2、然而,随着对传感器功能和性能要求的持续提高,单一类型的传感器已经难以应对多样化和复杂的应用场景。目前市场上的柔性传感器还面临一些挑战和问题。这些问题可能包括但不限于:1)电容式传感器的现有设计较为单一,其性能提升已经接近其潜力的极限,迫切需要创新的结构设计来突破这一瓶颈;2)材料选择的多样性和复杂性:在压电薄膜的制造中,材料的选择和配比方案多样,不同的组合对传感器的性能有着不同的影响,这增加了研发的复杂性;3)力识别维度的局限性:大多数电容传感器目前只能识别二维的力,这在需要三维力识别的应用场景中显得力不从心;4)动态感知范围的限制:单一模式的传感器在感知从静态到高频动态变化的信息方面存在局限,难以满足更广泛的监测需求。
3、目前,仅依靠单一类型的传感器,如压阻式和电容式传感器,由于它们较长的响应时间和较低的检测频率,主要限于检测低频的静态信号。与此同时,压电式和摩擦电式传感器虽然能够迅速产生电压信号,但这些信号随着时间推移会迅速消失,更适合捕捉动态变化。面对这种局限性,单纯提高单一传感器的性能已经难以实现对静态和动态信号的全面监测。因此,开发一种能够整合多种感知模式的传感器,以实现对信号的全面捕捉,已成为技术发展中的一个迫切需求。
4、为了应对以上挑战,并推动柔性传感器的实际应用,本发明提出一种织物检测的三维力双模式柔性应变传感器。
技术实现思路
1、为了克服上述现有技术中的缺陷,本发明提供了一种织物检测的三维力双模式柔性应变传感器,分别制备柔性静态三维力电容式应变传感器以及柔性动态三维力压电式应变传感器,将二者组合实现了从静态到高频动态信号的感知提升,同时也实现更多信息的实时采集,扩大了传感器应用范围。
2、技术方案
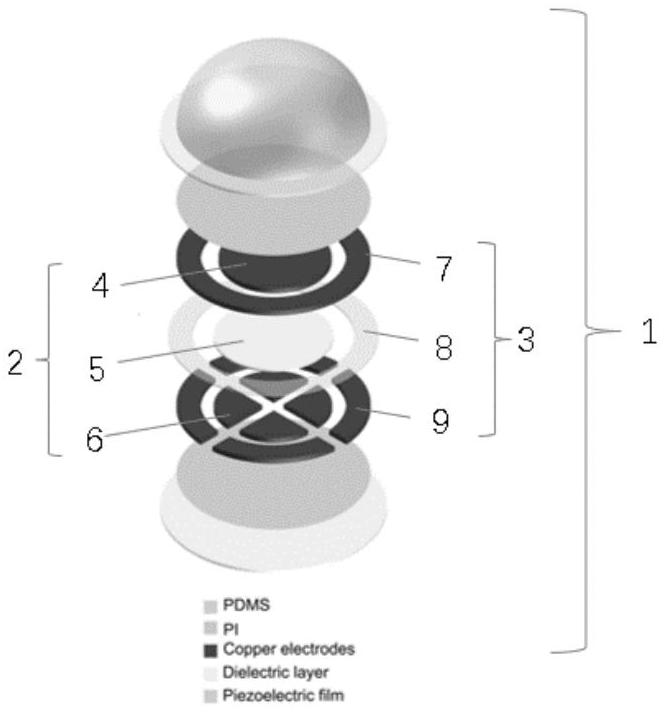
3、一种织物检测的三维力双模式柔性应变传感器,包括安装于柔性机械爪内侧的三维力双模式柔性应变传感器,所述三维力双模式柔性应变传感器包括柔性静态三维力电容式应变传感器与柔性动态三维力压电式应变传感器,所述柔性静态三维力电容式应变传感器包括电容式传感器上电极极板,电容式传感器离子薄膜介质层和电容式传感器铜电极阵列下极板,所述柔性动态三维力压电式应变传感器包括压电式传感器上电极极板,压电式传感器薄膜压电层和压电式传感器铜电极阵列下极板。
4、进一步的,所述三维力双模式柔性应变传感器的制备方法包括如下步骤:
5、1)称量0.7g的聚偏氟乙烯-六氟丙烯pvdf-hfp溶解于9ml的n,n-二甲基甲酰胺dmf中,再加入0.3g的溴化1-丁基-3-甲基咪唑离子盐[bmim]br,在离子盐完全溶解后,添加0.01g的己二胺(hmda)作为交联剂,交联上述溶液,之后将上述溶液置于60℃的水浴环境中加热搅拌8小时,取出该溶液;随后,将溶液倒入预先制备好的凹模模具中并放入75℃的烘箱中进行烘干处理,待其完全固化成型,制备出离子薄膜;
6、2)将附着在聚酰亚胺(pi)基板上的铜带在频率为25khz、电流为1a、速度为15mm/s的条件下进行紫外激光切割,制备得到电极阵列作为下极板以及圆形公共上极板;将步骤1)制得的离子薄膜作为介质层同下极板、上极板三层组装在一起,制备出柔性静态三维力电容式应变传感器;
7、3)称量0.5g的聚偏氟乙烯-六氟丙烯pvdf-hfp溶解于9ml的n,n-二甲基甲酰胺dmf中,再加入0.5g的钛酸钡batio3,在各成分完全溶解后,添加0.01g的己二胺hmda作为交联剂,交联上述溶液,之后将上述溶液置于60℃的水浴环境中加热搅拌8小时,取出该溶液;随后,将溶液倒入预先制备好的凹模模具中并放入75℃的烘箱中进行烘干处理,待其完全固化成型,制备出压电薄膜;
8、4)将附着在聚酰亚胺(pi)基板上的铜带在频率为20khz、电流为1a、速度为15mm/s的条件下进行紫外激光切割,制备得到电极阵列作为下极板以及环状公共上极板;将步骤1)制得的离子薄膜作为介质层同下极板、上极板三层组装在一起,制备出柔性动态三维力压电式应变传感器;
9、5)将步骤2)所制得的电容式传感器作为电容感知模块,将步骤4)所制得的压电式传感器作为压电感知模块,两者作为三维力双模式柔性应变传感器的电容感知模块和压电感知模块,用聚二甲基硅氧烷pdms将两个模块封装起来,用模具塑造圆顶,铜线通过导电银浆分别固定在电容式传感阵列的上下极板和压电式传感阵列的上下极板上,制备得到电容压电三维力双模式柔性应变传感器。
10、进一步的,所述柔性静态三维力电容式应变传感器在柔性机械爪做抓握动作时被挤压,根据所抓织物的厚度、弹性以及表面粗糙度等特征的不同,电容信号会有所差异,不同的电容变化率可以反映织物的厚度和弹性。
11、进一步的,所述柔性动态三维力压电式应变传感器在柔性机械爪做抓握动作时被挤压,根据所抓织物的厚度、弹性以及表面粗糙度等特征的不同,压电信号也会有所不同,不同的电压可以反映织物的弹性和织物表面的粗糙度。
12、进一步的,将所述三维力双模式柔性应变传感器中的电容感知模块的电容变化信号与所述三维力双模式柔性应变传感器中的压电感知模块的输出电压变化信号结合分析,将两组信号分别检测并组合,得到传感器织物检测组合识别波形图,进而反映所检测织物的大小、弹性以及织物表面粗糙度等特征。
13、进一步的,所述传感器电容感知模块测厚度越大的织物相对电容变化波形拥有更高的脉冲峰值,表面粗糙度越大的织物,所述传感器压电感知模块所测电压值波形拥有更高的脉冲峰值,弹性越小的织物,所述传感器电容感知模块和压电感知模块所测相对电容和电压波形变化越大,所述传感器织物检测信号中电容和压电信号的不同,不仅能区分不同厚度和弹性的织物,也能区分不同表面粗糙度的织物。
14、有益效果
15、与现有技术相比,本发明的优点在于:
16、1.将柔性静态三维力电容式应变传感器与柔性动态三维力压电式应变传感器组合在一起,实现了同一个传感器对两种不同电信号的采集;
17、2.制备出圆环嵌套结构的内圆外环双模式传感器结构以及具有圆顶结构的封装,有效提高了三维力双模式柔性应变传感器的稳定性和灵敏度以及整体抗电磁干扰能力;
18、3.以钛酸钡薄膜作为压电薄膜层,经过高压电场的极化后,制备出具有金字塔微结构的压电薄膜,将其作为压电式传感器的薄膜压电层,有效提高了压电式传感器的动态响应能力和稳定性;
19、4.将柔性静态三维力电容式应变传感器和柔性动态三维力压电式应变传感器组合,构建出具有双模式感知能力的柔性应变传感器,三维力双模式柔性应变传感器充分发挥了电容式传感器与压电式传感器的各自特长,实现了传感器从静态信息到高频动态信息的全面感知;
20、5.将电容信号与压电信号进行信号组合,得到多模态传感器织物检测信号组合信号波形,以此反映所检测织物的厚度、弹性以及表面粗糙度的特性。
21、6.三维力双模式柔性应变传感器独特的电极阵列设计能够很好地感应三维力的方向大小等触觉应变信息。
22、7.三维力双模式柔性应变传感器能够检测织物信号中电容和压电信号的不同,不仅能区分不同厚度和弹性的织物,也能区分不同表面粗糙度的织物。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327801.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。