零信任架构下基于数据一致性的车辆协同容错控制方法
- 国知局
- 2024-11-18 18:18:22
本发明涉及车联网及零信任领域,具体涉及零信任架构下基于数据一致性的车辆协同容错控制方法。
背景技术:
1、近年来智能交通系统(its)备受瞩目,车辆队列控制则成为its中的重要应用之一。车辆队列是由一组车辆构成,其中包括领航车和若干跟随车,这些车辆协同行驶,通常以相同的速度和较短的间隔距离行驶。与传统的驾驶模式相比,队列行驶具有增加道路车辆的吞吐量、提高交通效率、增强道路安全和降低燃料消耗等优点。
2、基于车辆队列的驾驶模式,利用vanets中的v2v通信实现了队列车辆之间的信息交换。v2v通信使得车辆能够共享当前的位置、速度、加速度、航向角等状态信息,迅速响应前方车辆行为的变化,提高系统的容错性,确保决策的迅速性和准确性。
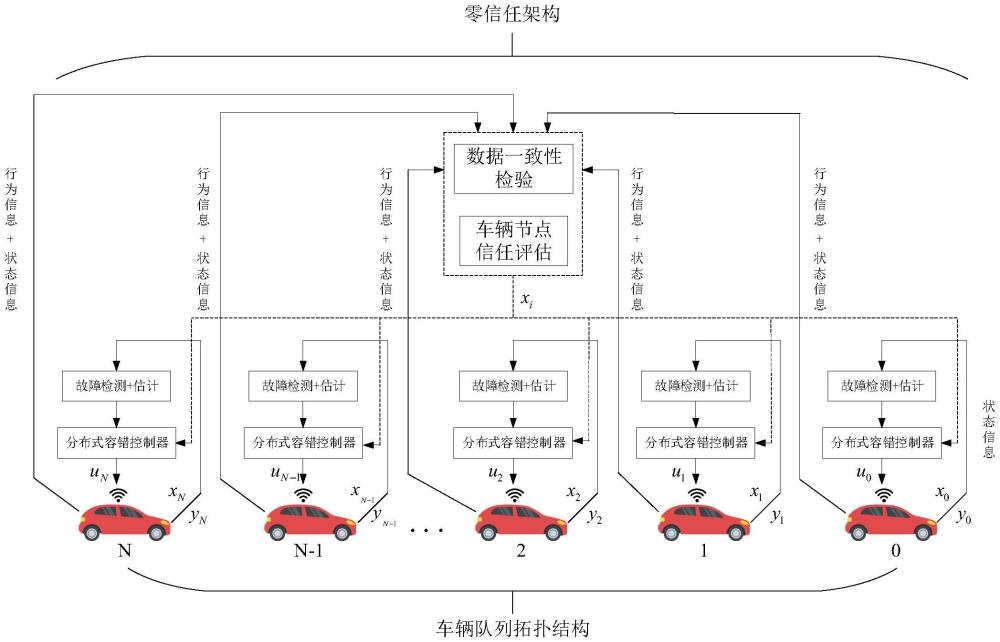
3、在车辆队列的协同控制中,安全通信至关重要,尤其是考虑到通信通常发生在开放的无线信道中。然而,车辆队列中车辆之间的状态信息通过网络传输时,需要面临如网络引起的延迟、网络中的入侵者或恶意节点造成数据丢包、信息泄露和信息篡改等安全问题。由通信网络引起的这些问题不可避免地会影响车辆之间的通信,并破坏整个控制系统的性能。零信任架构为上述问题提供了一种解决方案。零信任架构通过对每个网络请求进行严格的身份验证和加密处理来有效应对安全威胁。尽管零信任概念及其架构没有统一的定义,但是其永不信任,不断验证的核心理念是一致的。
4、车辆队列的容错控制是指设计用于处理和减轻由于各种故障或异常情况(如车辆通信失败、传感器错误、软件故障、硬件故障等)对车辆队列性能影响的机制。然而,当前的车辆队列缺乏有效的协同感知机制,无法充分利用周围车辆的状态信息和环境信息来提高行驶安全性和效率。此外,车辆之间的通信可能受到窃听或篡改影响,而且缺乏有效的身份认证机制。因此需要加强车辆间信息共享,提高通信安全性和身份认证,同时设计有效的隐私保护机制。
技术实现思路
1、针对上述现有技术的不足,本发明所要解决的技术问题是:如何提供一种零信任架构下基于数据一致性的车辆协同容错控制方法,首先在车辆队列中引入零信任构架来保证信息传输和交互的安全性;其次基于输出数据的一致性来车辆的信任度以保证信任度的准确性;进而通过奇偶空间的方法结合i/o数据模型构建残差生成器,并通过残差生成器执行器的故障估计值估计,以辅助车辆队列的协同容错控制;最后通过车辆的信任度和执行器的故障估计值的估计来设计基于补偿的协同容错控制器,从而提高车辆协同容错控制的效果。
2、为了解决上述技术问题,本发明采用了如下的技术方案:
3、零信任架构下基于数据一致性的车辆协同容错控制方法,包括:
4、s1:在零信任构架下,基于数据一致性评估方法评估车辆队列中的每个车辆对于其他车辆的信任度;
5、s2:为车辆队列构建系统状态空间方程,将系统状态空间方程重构为i/o数据模型;
6、s3:通过奇偶空间的方法,结合i/o数据模型构建对应的残差生成器;
7、s4:通过迭代学习的方法,结合残差生成器的输出计算执行器的故障估计值;
8、s5:对于车辆队列中的每个车辆,根据其对于其他车辆的信任度评估结果结合执行器的故障估计值构建基于补偿的协同容错控制器;
9、s6:对于车辆队列中的每个车辆,基于其协同容错控制器生成对应的控制输入以协同调整该车辆的运行状态。
10、优选的,步骤s1中,通过如下步骤评估车辆i对于车辆j的信任度:
11、sl01:通过车辆i和车辆j之间的变道频率、加速稳定性和减速稳定性的一致性计算行为信息一致性信任度tra(i,j);
12、s102:设定信任度阈值γ1,结合如下公式对车辆i和车俩j之间的行为信息一致性信任度tra(i,j)进行预处理,将行为信息一致性信任度tra(i,j)转换为0或1;
13、
14、s103:获取车辆i自身的状态数据序列xi={xi,1,xi,2,...,xi,n}以及车辆i接收的车俩j的状态数据序列x(i,j)={x(i,j),1,x(i,j),2,...,x(i,j),n};
15、s104:计算状态数据序列xi和x(i,j)对应元素差值δ(0,1),i=|x0,i-x(0,1),i|,组成差值序列z(0,1)={δ(0,1),1,δ(0,1),2,...,δ(0,1),n};
16、s105:根据差值序列计算车辆i和车俩j之间的节点状态信息一致信任度trb(i,j);
17、s106:设定信任度阈值γ2,结合如下公式对车辆i和车辆j之间的节点状态信息一致信任度trb(i,j)进行预处理,将节点状态信息一致信任度trb(i,j)转换为0或1;
18、
19、s107:通过预处理后的车辆i和车俩j之间的行为信息一致性信任度tra(i,j)和节点状态信息一致信任度trb(i,j)评估车辆i对于车俩j的信任度;
20、公式表示为:
21、γij=tra(i,j)·trb(i,j);
22、式中:γij表示车辆i对于车俩j的信任度。
23、优选的,步骤s101中,通过如下公式计算车辆i和车俩j之间的行为信息一致性信任度tra(i,j):
24、tra(i,j)=w1×fc(i,j)+w2×as(i,j)+w3×ds(i,j);
25、fc(i,j)=|fci-fcj|;
26、as(i,j)=|asi-asj|;
27、ds(i,j)=|dsi-dsj|;
28、
29、
30、
31、式中:w1、w2、w3为权重系数;fc(i,j)、as(i,j)、ds(i,j)分别表示车辆i和车俩j之间的变道频率、加速稳定性和减速稳定性的一致性;fci、asi、dsi分别表示车辆i的变道频率、加速稳定性和减速稳定性;fcj、asj、dsj分别表示车俩j的变道频率、加速稳定性和减速稳定性;ai表示第i次测量的加速度值;di表示第i次测量的减速度值;n表示测量次数。
32、优选的,步骤s105中,通过如下公式计算车辆i和车辆j之间的节点状态信息一致信任度trb(i,j):
33、
34、
35、式中:a1表示用于控制信任度下降速度的参数;n表示差值序列中元素差值的数量。
36、优选的,步骤s2中,车辆队列的系统状态空间方程表示为:
37、
38、式中:xi(k)为系统状态;yi(k)为系统输出;ui(k)为系统输入;a、b、c、d、e为系统的参数矩阵;fi(k)为故障输入;w(k)为过程噪声;v(k)为测量噪声。
39、优选的,步骤s2中,将车辆的输入作为i/o数据模型的输入,将车辆的加速度信息作为i/o数据模型的输出;
40、重构得到的i/o数据模型表示为:
41、yf=γsx(k)+hs,uuf+hs,wwf+vf;
42、
43、
44、
45、x(k)=[x(k)x(k+1)…x(k+n-1)];
46、
47、优选的,步骤s3中,通过如下步骤构建残差生成器:
48、步骤s3中,通过如下步骤构建残差生成器:
49、s301:从i/o数据模型中提取yf、uf、yp、up;
50、yf=γsx(k)+hs,uuf+hs,wwf+vf;
51、
52、
53、
54、s302:获取数据构建并进行svd分解;
55、s303:基于的svd分解结果构建等价空间和相关矩阵
56、s304:计算得到最大特征值λs,max和特征向量ls,max;
57、s305:构建鲁棒等价向量和
58、s306:构建残差生成器:r(k)=vsyx(k)-βsus(k)。
59、优选的,步骤s4中,通过如下步骤实现故障估计:
60、s401:获取残差生成器r(k)=vsys(k)-βsus(k);
61、s402:引入l2正则化项,基于残差生成器构建目标函数;
62、目标函数表示为:
63、
64、式中:r表示系统的残差;q表示设计矩阵;表示故障信号的估计值;||·||2表示二范数的平方(l2范数);λ是正则化参数,控制正则化项的权重;
65、s403:将目标函数拆分为残差误差项和正则化项两个部分;
66、残差误差项表示为:
67、
68、正则化项表示为:
69、
70、s404:分别求解残差误差项和正则化项的梯度;
71、1)残差误差项j1(f)的梯度:
72、2)正则化项j2(f)的梯度:
73、s405:将残差误差项和正则化项的梯度进行合并和化简;
74、公式表示为:
75、
76、为了使梯度为零,求解故障估计值f:
77、
78、简化为:
79、s406:生成故障估计值的闭式解;
80、公式表示为:
81、
82、式中:q表示设计矩阵;r表示系统的残差;λ表示正则化参数;i是单位矩阵,用于确保qtq+λ,可逆。
83、优选的,步骤s406中,使用梯度下降法迭代求解故障估计值;
84、公式表示为:
85、
86、式中:η表示学习率;λ表示正则化参数;r(k)表示残差。
87、优选的,步骤s5中,通过如下公式表示车辆i的控制器:
88、
89、式中:xi1表示车辆i的第一个状态量即位置;xi2表示车辆i的第二个状态量即速度;xi3表示车辆i的第三个状态量计加速度;xj1表示车俩j的第一个状态量;xj2表示车俩j的第二个状态量;xj3表示车俩j的第三个状态量;kp、kv、ka为控制器增益;d表示车辆队列中车辆的间距;γij为车辆i对于车俩j的信任度;b*为待设计的参数矩阵;表示故障估计结果。
90、本发明中零信任架构下基于数据一致性的车辆协同容错控制方法与现有技术相比,具有如下有益效果:
91、本发明在车辆队列中引入零信任构架,使得在车辆网络中车辆间的信息传输和交互都需要满足零信任构架的要求,即需要经过严格的身份验证和授权。这意味着车辆间的通信需要实时验证参与实体的身份,包括车辆、用户和数据,确保只有合法的实体才能访问相应的资源。通过将车辆网络划分为多个隔离的段,每个段都作为一个独立的安全区域,从而减少潜在的攻击面。即使某个分段受到攻击,攻击者也难以横向移动到其他分段,从而提高车辆队列运行的安全性。
92、本发明基于数据一致性评估方法评估车辆队列中的每个车辆对于其他车辆的信任度。首先,通过比较车辆在多个维度上的输出数据(包括变道频率、加速度变化、减速稳定性和状态)的一致性,能够更全面地评估车辆的信任度,当多辆车的输出数据在相同或相似条件下呈现出高度一致性时,这些车辆的信任度可以得到提升;同时当某辆车的输出数据与其他车辆存在显著不一致时,往往是该车辆出现异常行为的信号,进而能够及时发现并标记这些异常车辆,从而降低对它们的信任度,提高评估的准确性。其次,车辆的输出数据涉及多个维度的数据,如变道频率反映了车辆的驾驶习惯和稳定性,加速度变化揭示了车辆的加速和制动性能,减速稳定性则直接关系到车辆的安全性能,通过多个维度数据的融合使得信任度评估更加全面和准确。最后,通过实时获取车辆之间的输出数据,能够动态地评估每辆车的信任度,及时反映车辆状态的变化,确保了信任度评估的时效性。
93、本发明将系统状态空间方程重构为i/o数据模型,进而通过奇偶空间的方法结合i/o数据模型构建对应的残差生成器。首先,将复杂的系统状态空间方程转化为直观的输入输出关系即i/o数据模型,简化了故障分析过程,使得故障定位和诊断更加高效;同时i/o数据模型直接关联系统输入输出,使得系统状态的监测和故障检测更加直观。其次,在i/o数据模型的基础上结合奇偶空间方法,奇偶空间方法允许从系统输入到输出的映射中提取出与故障相关的特征,因此通过奇偶空间构建的残差生成器能够更直接地反映系统异常,进而提高故障检测的灵敏度和准确性。最后,奇偶空间方法实时性较强,可以设计成适用于实时故障检测系统,允许快速计算残差并向系统提供及时反馈;同时奇偶空间法通过设计残差生成器来产生残差,这些残差对于系统的内部和外部扰动具有很好的鲁棒性,这意味着即使在系统受到噪声或其他类型干扰的情况下,该方法仍然能够有效地检测故障。
94、本发明在构建残差生成器的基础上,通过迭代学习的方法结合残差生成器的输出计算执行器的故障估计值。首先,迭代学习方法通过不断学习和优化,能够逐渐提高故障估计的精度,进而提高系统的适应性和鲁棒性。其次,面对车辆队列中可能出现的各种复杂环境和工况变化,迭代学习方法能够自适应地调整故障估计模型,从而提高系统在不同条件下的鲁棒性;同时迭代学习方法支持在线学习和调整,使得系统能够根据实际运行情况不断优化故障估计模型,提高系统的自适应性和智能化水平。最后,通过实时的执行器故障估计,有助于动态调整控制策略,确保即使在复杂多变的环境中也能维持队列的稳定性。
95、本发明在信任度评估和执行器故障估计的基础上,进一步为车辆队列中的每个车辆构建基于补偿的协同容错控制器,进而基于协同容错控制器生成的控制输入协同调整车辆的运行状态。首先,结合信任度评估和执行器故障估计值构建的协同容错控制器,能够更精准地识别并补偿故障车辆的影响,实现更加精准的容错控制策略,从而提高车辆协同容错控制的效果。其次,基于补偿的协同容错控制器能够根据不同故障类型和程度灵活调整控制策略,通过协作方式补偿调整其他车辆的控制输入,弥补故障车辆的功能缺失,保持整个车辆队列的协同性和稳定性,并适应不同的故障场景和需求。最后,协同容错控制器的引入,使得系统在面对个别车辆故障时能够保持整体功能的正常运行,提高了整个车辆队列的可靠性和可用性。
本文地址:https://www.jishuxx.com/zhuanli/20241118/328116.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。