一种融合机理的车辆动力学数据驱动建模及路径跟踪控制方法
- 国知局
- 2024-11-18 18:16:08
本发明属于智能汽车建模领域,具体涉及一种融合机理的车辆动力学数据驱动建模及路径跟踪控制方法。
背景技术:
1、随着智能驾驶技术的快速发展,车辆动力学建模及路径跟踪控制方法在自动驾驶系统中的重要性日益凸显。传统的车辆动力学建模方法主要依赖于物理模型,这些模型基于车辆的结构和动力学特性,通过精确的数学描述实现对车辆行为的预测。然而,这种方法在实际应用中存在一定的局限性。例如,由于车辆的非线性和复杂性,物理模型的精确度会受到影响。此外,模型参数的确定通常需要大量的实验数据和专业知识,增加了模型构建的复杂度和成本。
2、近年来,随着大数据和人工智能技术的发展,数据驱动的方法逐渐成为一种有效的替代方案。数据驱动建模方法通过利用大量的历史数据,使用机器学习和深度学习算法建立车辆动力学模型。这种方法能够有效地处理非线性和高维数据,提高模型的精确度和鲁棒性。然而,纯数据驱动的方法也存在一些问题,例如对数据质量和数量的依赖较高,缺乏物理意义的解释,难以推广到不同的车辆和工况。
3、查阅相关专利发现,专利cn113657036公开了一种结合神经网络和物理模型的车辆动力学模拟方法,其中神经网络用于拟合部分参数。然而,该方法本质上依赖于自由度较低的车辆横向动力学机理模型,并且未能充分考虑实际车辆模型的非线性特性以及横向和纵向动力学的耦合。专利cn116992573公开了一种组合门控循环单元和前馈神经网络(gru-fnn)的数据驱动建模方法,其考虑了汽车动力学样本的时序相关性和横纵向状态特征量的耦合特性,但其并未考虑机理因素,并且未将其应用于控制系统中。
技术实现思路
1、本发明针对单纯神经网络建模存在泛化能力及可解释性较差等不足,并充分考虑汽车动力学样本的时序相关性和横纵向状态特征量的耦合特性,设计了一种融合机理的车辆动力学数据驱动建模及路径跟踪控制方法,旨在提高模型的精度及适应性、速度跟踪控制的准确性及响应特性、路径跟踪控制的精确性及稳定性,进而提升智能汽车在复杂交通环境中的控制性能和安全性。
2、本发明提供了一种融合机理的车辆动力学数据驱动建模及路径跟踪控制方法,包括以下步骤:
3、s1.建立车辆动力学三自由度机理模型;
4、s2.构建融合机理的车辆动力学数据驱动预测模型;
5、s3.将融合机理的车辆动力学数据驱动预测模型嵌入模型预测控制算法中;
6、s4.构建车辆路径跟踪误差模型;
7、s5.建立约束条件及代价函数。
8、进一步,所述步骤s1包括以下子步骤;
9、s1.1做车辆动力学假设,添加非线性轮胎模型,得车辆横纵向耦合动力学表达式;
10、所述车辆动力学假设包括:假设车辆仅在一个水平平面上运动,忽略车辆的纵向倾斜和横向倾斜运动;仅考虑车辆沿车身纵向x轴的纵向运动、沿车身横向y轴的横向运动以及绕底盘垂直方向z轴的横摆运动;假设轮胎产生的侧向力和纵向力与轮胎侧偏角和滑移率之间的关系是线性的;假定车辆是一个刚体,即忽略车辆结构的弹性形变以及悬挂系统的动态响应;忽略空气阻力和侧风力的影响;假设车辆行驶的路面是均匀的,并具有一致的摩擦特性,忽略路面的不均匀性对车辆动力学性能的影响;
11、车辆横纵向耦合动力学表达式如下:
12、
13、
14、fy=dsin[carctan(bαi-e(bαi-arctan(bαi)))]
15、fyi=caiαi
16、式中,fx1,fx2分别为前后轮纵向所受合力;fy1,fy2分别为前后轮横向所受合力;vy,vx,ψ分别为车辆的横向速度、纵向速度和横摆角速度;θf和θr分别为前后轮转向角;和为车辆在全局坐标系下的纵向速度和横向速度;(x,y)为车辆的位置坐标;为偏航角;fres为滚动阻力;fy为轮胎侧向力;b为刚度系数;c为形状系数;d为峰值系数;e为曲率系数;fyi表示fy1或fy2;cai表示前车轮的侧偏刚度caf或后车轮的侧偏刚度car;α1和α2分别为前轮和后轮的侧偏角,αi表示α1或α2,αi为小角度;la表示车辆前轴到质心的距离;lb表示车辆后轴到质心的距离;m表示车辆质量;iz表示转动惯量;
17、s1.2确定汽车动力学模型的输入量和输出量,即控制量和状态量;
18、控制量uk=[fx(t),θf(t)]
19、状态量xk=[vx(t),vy(t),ψ(t)]
20、式中,t为当前时刻;fx(t)为当前时刻的车辆纵向驱动力;θf(t)为当前时刻的车辆前轮转角。
21、进一步,所述步骤s2包括以下子步骤:
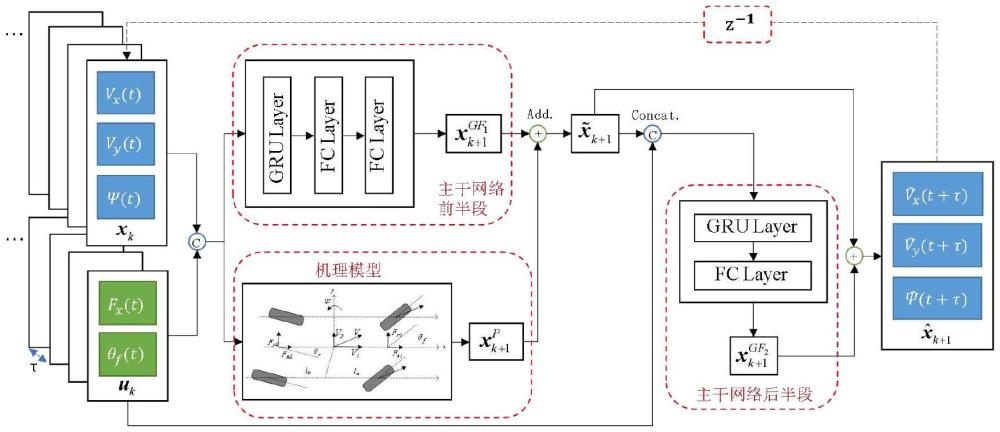
22、s2.1根据步骤s1建立的车辆动力学三自由度机理模型,构建融合机理模型和门控-前馈主干网络模型的车辆动力学数据驱动预测模型;
23、其中,预测模型主体结构分为主干网络前后两半段,前半段包含一个gru层和两个全连接层,后半段包含一个gru层和一个回归层;
24、s2.2构建当前时刻车辆动力学数据驱动预测模型的前向计算过程表达式;
25、s2.3对主干网络后半段进行状态初始化;
26、初始化过程满足如下公式:
27、h0=fgru,init([xk-l,uk-l],...,[xk-1,uk-1])
28、式中,[xk-l,uk-l],...,[xk-1,uk-1]为l步历史控制信息和状态信息;fgru,init(·)为gru初始化器函数;h0为初始化器输出的最终隐藏状态;
29、s2.4将训练过程分为两个阶段,第一阶段为主干网络前半段的训练,第二阶段为车辆动力学数据驱动预测模型整体的训练;
30、其中,第二阶段分为预训练和反馈训练。
31、进一步,所述步骤s3包括以下子步骤:
32、s3.1构建基于数据驱动预测模型的mpc框架;
33、s3.2根据mpc框架,建立基于融合机理的车辆动力学数据驱动预测模型的mpc预测流程;
34、s3.3通过数据驱动的预测模型生成未来一段时间内的状态预测,然后基于预测结果执行优化以生成控制信号。
35、进一步,所述步骤s4包括子步骤:
36、s4.1建立路径跟踪误差表达式;
37、
38、
39、式中,e为横向误差,是车辆质心到参考路径最近的距离;为航向误差,是车体中心线与参考线上最近点位置的切线之间的夹角;ψref为车辆期望横摆角速度;
40、
41、式中,s为汽车沿参考路径行驶的距离;κ为路径中每个点的连续曲率;
42、s4.2将车辆动力学数据驱动预测模型的输出量代入路径跟踪误差模型表达式,计算得到横向误差和航向误差;之后根据横向误差和航向误差建立代价函数,添加惩罚项使得路径跟踪误差最小化,以确保车辆准确跟踪预定路径。
43、进一步,所述步骤s5包括以下子步骤:
44、s5.1构建控制量及增量约束、质心侧偏角约束、车辆动力学约束;
45、s5.2考虑车辆纵向速度变化以及路径跟踪误差模型状态输出目标值为零,在任意离散时间步,建立有限时域优化问题表达式。
46、有益效果:
47、本发明提出了一种融合机理的车辆动力学数据驱动建模及路径跟踪控制方法,能够提高模型的精度及适应性、速度跟踪控制的准确性及响应特性、路径跟踪控制的精确性及稳定性,进而提升智能汽车在复杂交通环境中的控制性能和安全性。
48、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究,对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327915.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。