四轮驱动智能电动汽车的快速路径跟踪分布式控制方法
- 国知局
- 2024-11-18 18:15:39
本发明涉及智能电动汽车路径跟踪控制领域,主要涉及一种四轮驱动智能电动汽车的快速路径跟踪分布式控制方法。
背景技术:
1、路径跟踪控制是实现汽车智能化的关键技术。它通过车辆状态信息和预先规划好的期望路径,实时控制前轮转角大小,旨在最小化车辆与目标路径之间的横向偏移和航向误差,确保车辆按照预期路径行驶。目前,智能汽车在大多数工况下都可以实现较好的路径跟踪效果。然而,当汽车在高速、大曲率行驶时,轮胎的侧向非线性因素的增强,转向控制下的路径跟踪精度会受到较强的影响,路径跟踪控制器决策出的前轮转角很难满足控制需求;在高速低附着路面下,汽车过弯时容易发生侧滑、甩尾等危险工况,由于仅有前轮转角一个控制量,在极端工况下,转向控制器难以在路径跟踪的同时保障汽车的动力学稳定性。
2、转向系统通过轮胎侧向力直接使汽车产生侧向加速度,进而直接影响横向位移,而主动横摆力矩控制(dyc)是通过影响横摆角速度,间接地影响汽车的横向响应。采用dyc与主动转向的协调控制可有效提高车辆路径跟踪过程中的动态性能。四轮驱动电动汽车4个车轮驱动/制动力矩独立可控,可在电机能力范围内精确、快速地实现单个车轮驱制动力矩控制和轴间、轮间转矩分配控制,为汽车的横向控制提供了额外的自由度,能显著地提升汽车的操纵性和稳定性。针对四轮驱动智能电动汽车中主动转向与dyc的协调机制常采用的控制方法包括:最优控制、滑模控制、自适应反演控制、模型预测控制等。文献1【liang j,lu y,yin g,et al.a distributed integrated control architecture ofafs and dycbased on mas for distributed drive electric vehicles[j].ieee transactions onvehicular technology,2021,(99):1-1.】将afs系统和dyc系统视为多智能体,提出了一种基于mas思想的新型afs+dyc系统集成控制的分布式框架,通过帕累托最优理论得到两种智能体的协同控制策略,来提高车辆的横向稳定性,同时减少驾驶员在路径跟踪过程中的计算量。文献2【hang p,chen x,luo f.lpv/h-infinity controller design for pathtracking of autonomous ground vehicles through four-wheel steering anddirectyaw-moment control[j].international journal of automotive technology,2019(4):20.】采用四轮转向(4ws)和直接横摆力矩控制(dyc)系统对自主地面车辆(agv)的路径跟踪控制进行设计,采用线性变参数(lpv)/h∞控制作为上层控制器,下层利用加权最小二乘(wls)分配算法进行转矩分配。文献3【mashadi,b.,ahmadizadeh,p.,majidi,m.etal.integrated robust controller for vehicle path following.multibody syst dyn33,207–228(2015).】针对集成的4ws+dyc控制系统,基于μ合成方法设计了一种鲁棒控制器来实现agv的路径跟踪,该方法具有使车辆在存在参数不确定性的情况下跟踪所需路径的强大能力。上述的主动转向和dyc协调控制方案均是利用主动横摆力矩带来的冗余控制自由度在提升四轮驱动智能电动汽车的路径跟踪能力的同时,兼顾了动力学稳定性。但上述方法在实现的过程中较少考虑轮胎滑移、以及计算效率和系统动态性能的有效权衡。
3、由于多智能体系统可通过各智能体的相互协作实现复杂智能,在降低系统建模复杂性的同时,提高系统的鲁棒性、可靠性、灵活性,已在飞行器编队、传感器网络、数据融合、并行计算、交通车辆控制等领域广泛应用。滑模控制的主要思想是设计一种动态的、连续的或离散的控制策略,使得系统的状态能够在预设的滑模面上滑动,达到期望的性能。因此,本发明通过重新定义系统输出,将欠驱动的智能电动汽车路径跟踪系统分解为输入输出子系统和零动态子系统,提出基于多智能体的输入输出子系统自适应滑模控制方法,控制器中的设计参数以满足零动态子系统快速收敛为目标选取,以有效权衡路径跟踪精度和动力学稳定性。
技术实现思路
1、为了提高智能电动汽车的路径跟踪能力,保证其在极限工况下的动力学稳定性,本发明以实现降低整个系统控制器的设计难度以及提高算法实时性为目的,权衡系统的性能指标和计算效率,采用重新定义系统输出的方法,提出四轮驱动智能电动汽车的快速路径跟踪分布式控制方法,在保证不同工况下良好循迹控制效果的同时,提高系统的动力学稳定性。
2、本发明解决技术问题所采取的技术方案如下:
3、四轮驱动智能电动汽车的快速路径跟踪分布式控制方法,其方法包括如下步骤:
4、步骤一、利用carsim汽车模型获得车辆实时参数:y轴下坐标、x轴下坐标、航向角、横向速度和加速度、纵向速度和加速度、航向角速度、各车轮滚动角速度、各车轮垂向力等;
5、步骤二、根据车辆的运动学和动力学机理,建立四轮驱动智能电动汽车的路径跟踪模型;
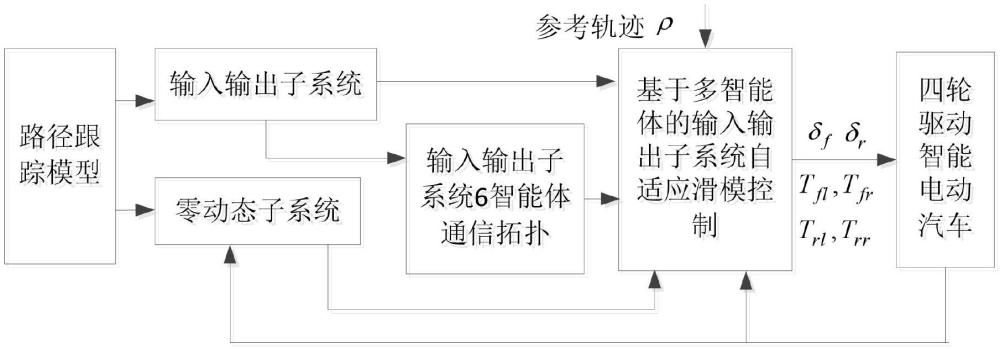
6、步骤三、根据步骤二获得的路径跟踪模型,重新定义系统的输出,通过输入输出线性化,将路径跟踪模型分解为输入输出子系统和零动态子系统;
7、步骤四、将输入输出子系统中的6个自由度方程看做6个智能体,根据6个智能体的内部工作通讯,确定输入输出子系统6智能体的拓扑结构,基于图论方法获得6个智能体之间用于信息交换的邻接矩阵a、入度矩阵d、拉普拉斯矩阵l以及关联矩阵b;
8、步骤五、根据carsim汽车模型输出的y轴下坐标、x轴下坐标、航向角、横向速度和加速度、纵向速度和加速度、航向角速度、各车轮滚动角速度、各车轮垂向力等,以步骤三获得的零动态子系统状态快速收敛为目标进行控制器参数的设计;
9、步骤六、根据给定参考轨迹、步骤三获得的输入输出子系统、步骤四获得的6个智能体之间用于信息交换的邻接矩阵a、入度矩阵d、拉普拉斯矩阵l以及关联矩阵b、步骤五获得的控制器参数,通过基于多智能体的输入输出子系统自适应滑模控制模块,获得四轮转向角和四轮驱动力矩,并将其输入给carsim汽车模型。
10、本发明的有益效果如下:
11、1)本发明根据车辆的动力学运动机理,建立了路径跟踪系统的数学模型,考虑四个车轮的滑转状态、轨迹跟踪误差及横摆稳定性,重新定义系统的输出,利用输入输出线性化将路径跟踪系统分解为输入输出子系统和零动态子系统,实现了模型的降维和解耦。
12、2)本发明将输入输出子系统中的6自由度方程看作6个智能体,建立基于图论的输入输出子系统降维控制模型,简化了模型维度。
13、3)本发明针对输入输出子系统,提出基于多智能体的自适应滑模控制策略,使输入输出子系统的状态:各车轮滑移状态δωσ、车辆侧向运动δγ和δvy在有限时间收敛到零,在控制车辆操纵稳定性的同时,防止了车轮的过度滑转,有效权衡了系统的性能指标和工程应用时对算法的算力要求。
14、4)本发明以零动态子系统的航向角跟随误差、横向位移跟随误差在平衡点附近快速稳定为目标,选取控制器的设计参数,从而保证智能电动汽车轨迹跟踪控制系统的渐近稳定。
15、5)本发明所提方法简单易于实现,适用面广,适宜广泛推广应用。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327856.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表