基于无人机深度估计的无人机三维位置估计方法
- 国知局
- 2024-11-18 18:21:20
本发明涉及无人机定位,特别涉及一种基于无人机深度估计的无人机三维位置估计方法。
背景技术:
1、目前,煤矿井下的巡检任务依然面临诸多挑战。尽管许多国内煤矿仍然依赖传统的人工巡检方式,但这种方式容易受到人为因素的影响,如巡检人员的经验、技能、工作态度和健康状况等,这些因素都可能降低巡检的可靠性。此外,煤矿井下环境复杂且危险,充斥着有害气体,这对巡检人员的安全构成严重威胁。当煤矿井下发生紧急情况时,特别是在偏远或无人值守的区域,人工巡检的反应能力和应急处理能力相对较弱,远程指挥和调度的难度也较大。因此,从提高巡检的可靠性、效率、安全性和可操控性出发,采用无人机进行煤矿井下的自动巡检正逐渐成为一种发展趋势。巡检无人机不仅能够稳定、连续地执行巡检任务,而且能够在危险环境下工作,降低人员安全风险,并通过智能化的手段提高巡检效率和准确性。随着技术的不断进步和成本的逐步降低,无人机有望在煤矿行业中得到更广泛的应用,为煤矿的安全生产和高效管理提供有力支持。
2、而矿井下无人机的精准定位是可靠巡检的基础。当前,矿井下无人机的定位面临着几大难点。首先,由于卫星定位信号穿过煤矿层到达井下时已然严重衰减,因此卫星定位无法应用于矿井下无人机定位。其次,煤矿井下地质条件复杂多变,障碍物和粗糙的巷道壁会对信号的发射与接收,反射和散射都造成严重影响,形成井下信号的多径效应。最后,复杂的电磁环境会对信号的传播产生严重干扰,导致定位精度误差大甚至失效,且功耗还高。考虑以上几个难点,超宽带(ultra-wideband,uwb)技术现阶段成为了矿井下定位的主流方法。uwb不使用传统的载波来传输数据,而是利用宽度可达到纳秒(ns)甚至皮秒(ps)级别的冲击脉冲来传输信息。在频域上,uwb的带宽远超一般的窄带和宽带,使得uwb能够在非常宽的频带范围内传输信息,从而实现矿井下高数据传输速率和更低的功率谱密度,以及厘米级甚至毫米级的定位精度。然而,由于矿井下布线的成本高昂,现阶段矿井下uwb的覆盖范围只能建立矿井下的一维直线地图,缺乏对无人机进行三维定位的能力。
3、基于此,提出本发明。
技术实现思路
1、本发明的目的是提供一种基于无人机深度估计的无人机三维位置估计方法。
2、为实现上述目的,本发明提供如下技术方案:
3、基于无人机深度估计的无人机三维位置估计方法,包括如下步骤:
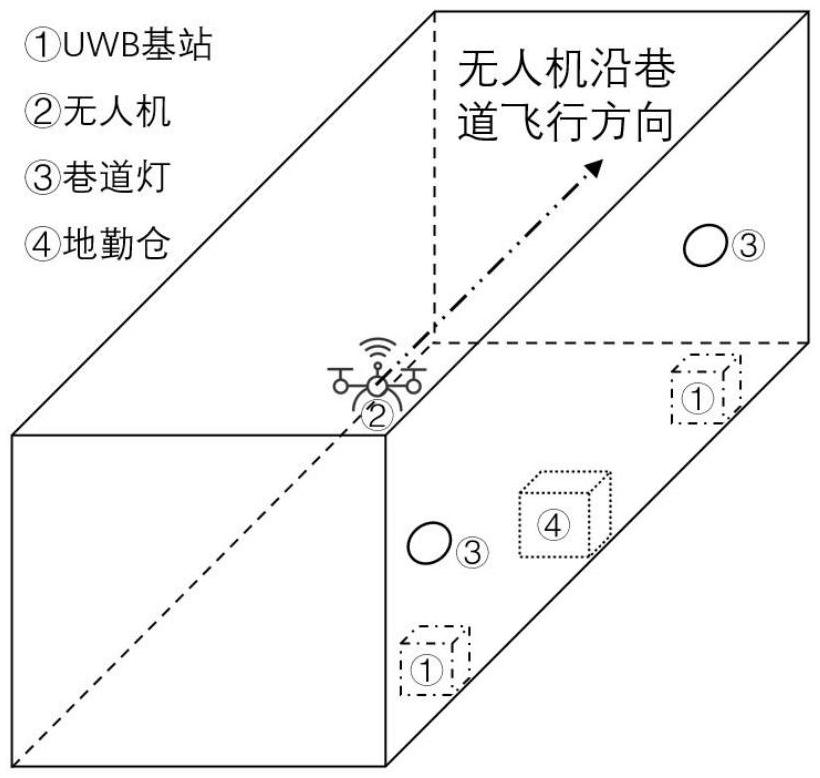
4、(1)在矿井巷道中每间隔一段距离安装一个巷道灯;
5、(2)在无人机上挂载相机并设置位移传感器,无人机飞行过程中控制相机实时拍摄巷道灯得到图像信息,通过位移传感器得到无人机的移动距离信息;
6、(3)建立世界坐标系、飞机坐标系、相机坐标系和巷道灯坐标系;
7、(4)从相机拍摄的前后两帧图像,并结合无人机的移动距离信息推导两者在世界坐标系下的平移向量;
8、(5)从平移向量获取巷道灯相对于相机的估计深度,从而计算得到无人机的三维位置。
9、本发明提供了一种优选方案,所述步骤四中,结合无人机机理模型进行推导和近似计算。
10、本发明提供了一种优选方案,所述步骤四中,基于针孔成像模型和三角测量法从平移向量获取巷道灯相对于相机的估计深度,从而计算得到无人机的三维位置。
11、与现有技术相比,上述技术方案具有以下优点:
12、本发明通过在现阶段矿井下uwb的覆盖范围只能建立矿井下的一维直线地图,缺乏对无人机进行三维定位的能力。
13、(1)本发明通过在矿井巷道中每间隔一段距离安装一个巷道灯、在无人机上挂载相机并设置位移传感器,无人机飞行过程中控制相机实时拍摄巷道灯得到图像信息,通过位移传感器得到无人机的移动距离信息,并通过建立世界坐标系、飞机坐标系、相机坐标系和巷道灯坐标系,从相机拍摄的前后两帧图像,结合无人机的移动距离信息推导两者在世界坐标系下的平移向量,从平移向量获取巷道灯相对于相机的估计深度,从而计算得到无人机的三维位置,实现矿井下对无人机的精准定位。
14、(2)由于无人机的深度估计的本质是无人机的位置估计,因此可通过相机拍摄前后两帧图像和推导的世界坐标系下的平移向量所得,本发明通过无人机机理模型近似计算无人机在世界坐标系下的位置,得到世界坐标系下以真实比例放大的近似真实平移向量。
15、(3)本发明基于针孔成像模型和三角测量法从相机所得的近似真实平移向量获取巷道灯相对于无人机相机的估计深度,从而计算得到无人机的三维位置,进而实现矿井下无人机三维位置的精准定位。
16、(4)本发明只需要使用单目相机,而非双目相机、rgb-d深度相机或光流传感器便可进行三维建模,并解决了在矿井下上述传感器基本无法使用的问题,且本发明采用单目相机相对比rgb-d相机、光流传感器有质量轻、计算速度快、功率低的优点,适合搭载于有负载限制和功率限制的矿井下无人机上。
技术特征:1.基于无人机深度估计的无人机三维位置估计方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,所述步骤四中,结合无人机机理模型进行推导和近似计算。
3.根据权利要求1所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,所述步骤五中,基于针孔成像模型和三角测量法从平移向量获取巷道灯相对于相机的估计深度,从而计算得到无人机的三维位置。
4.根据权利要求2所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,步骤四中,结合无人机机理模型进行推导和计算,具体包括如下:
5.根据权利要求3所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,步骤五中,基于针孔成像模型和三角测量法从平移向量获取巷道灯相对于相机的估计深度,从而计算得到无人机的三维位置,具体包括如下:由齐次变换矩阵的定义可知,无人机的三维位置flc与巷道灯的几何中心点在第i帧的相机坐标系中坐标cpi=[cxi,cyi,czi]t等价,将问题转化成求解cpi的问题。
6.根据权利要求5所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,通过针孔成像模型得到相机拍摄图像的像素坐标点pi=[ui,vi]t与相机坐标系下三维坐标cpi之间的关系表达式为:
7.根据权利要求5所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,所述k由张正友标定法得到。
8.根据权利要求5所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,所述pi由yolo-v5目标检测算法得到。
9.根据权利要求6所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,所述三角测量法的本质是考虑到同一个空间点在前后不同时刻的位置坐标进行计算,因此根据式(6)可知,第i帧的相机坐标系下p点坐标为cpi=[cxi,cyi,czi]t,有cpi=czik-1pi,第i-1帧的相机坐标系下p点坐标为cpi-1=[cxi-1,cyi-1,czi-1]t,有cpi-1=czi-1k-1pi-1,又由相机前后两帧中的坐标变化关系式其中和fii-1是第二个相机在第一个相机的相机坐标系下的外参,可知:
10.根据权利要求6所述的基于无人机深度估计的无人机三维位置估计方法,其特征在于,根据深度信息进一步得到世界坐标系下的另外两维坐标信息:
技术总结本发明提供了一种基于无人机深度估计的无人机三维位置估计方法,涉及无人机定位技术领域,本发明通过在矿井巷道中每间隔一段距离安装一个巷道灯、在无人机上挂载相机并设置位移传感器,无人机飞行过程中控制相机实时拍摄巷道灯得到图像信息,通过位移传感器得到无人机的移动距离信息,并通过建立世界坐标系、飞机坐标系、相机坐标系和巷道灯坐标系,从相机拍摄的前后两帧图像,结合无人机的移动距离信息推导两者在世界坐标系下的平移向量,从平移向量获取巷道灯相对于相机的估计深度,从而计算得到无人机的三维位置,实现矿井下对无人机的精准定位。技术研发人员:沈逸,罗欣,唐其鹏,沈安文,徐金榜受保护的技术使用者:华中科技大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/328353.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。