一种基于A型架的可移动式无人艇收放运动补偿系统
- 国知局
- 2024-11-19 09:30:38
本发明涉及无人艇布放回收,具体而言,尤其涉及一种基于a型架的可移动式无人艇收放运动补偿系统。
背景技术:
1、收放作业是无人艇使用过程中的重要环节,其安全性和可靠性直接关系到无人艇能否顺利完成任务。当前,无人艇收放方式主要有如下三种:其一是吊放式收放技术,该技术相对比较成熟,对母船船体的要求较小,但缺点是收放速度受海况影响较大,恶劣海况下难以对准托架,需要人工挂钩及脱钩,收放过程耗时较长;其二是坞舱式收放技术,其能够适应复杂的水面状况,收放速度快,但对母船结构要求较高,需要母船配备有大型的坞舱;其三是艉滑道式收放技术,其受水面状况的影响较小,收放速度较快,但无人艇靠近艉滑道时的对中和控制较为困难。
2、然而,上述作业方式大多需要人工辅助完成,尚未实现无人艇的主动收放,且收放作业易受到海况变化的影响,这增加了收放过程的难度和风险,极易发生捕获失败、无法接近甚至无人艇碰撞损毁等情况,严重危及作业人员和装备的安全性。
技术实现思路
1、根据上述提出现有无人艇收放方案中易受到海况变化影响的技术问题,而提供一种基于a型架的可移动式无人艇收放运动补偿系统。本本发明通过补偿车上安装的减摇索实时调整张力大小并协同主吊索及a型架运动,进而抑制无人艇在布放回收作业中的摇摆现象。
2、本发明采用的技术手段如下:
3、一种基于a型架的可移动式无人艇收放运动补偿系统,包括:
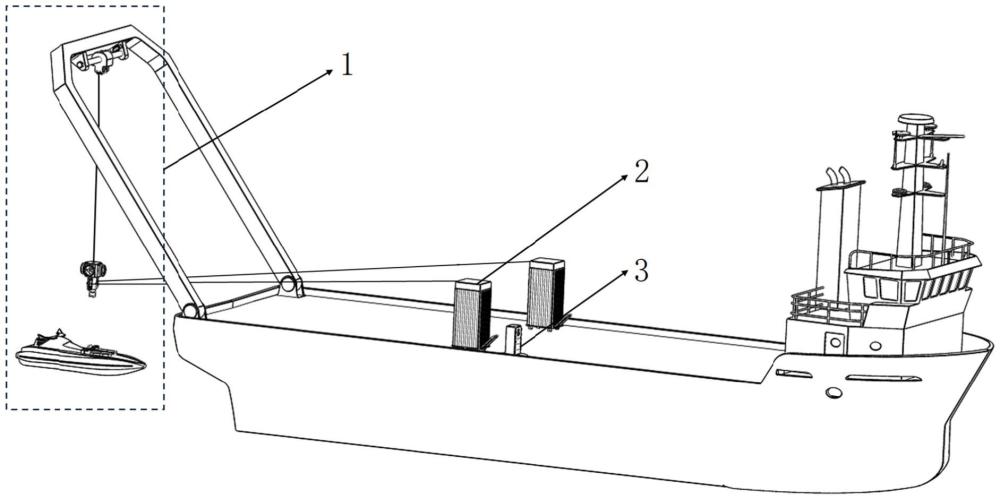
4、吊放装置,用于吊放无人艇,所述吊放装置通过吊索移动机构及螺旋桨推进器结合无人艇的方位实时调整吊索位置,利用对接固定装置连接并固定无人艇;
5、补偿车,用于通过减摇索抑制无人艇在吊放过程中出现的摇摆现象;
6、控制单元,用于接收无人艇吊放过程中摄像头的视频信息及张力传感器、角度传感器的数据信息,并根据无人艇吊放过程中摄像头的视频信息及张力传感器、角度传感器的数据信息生成相应的控制信号,将控制信号发送至吊放装置和补偿车对吊放装置及补偿车远程控制。
7、进一步地,所述吊放装置包括a型架、吊索安装架、吊索移动机构、第一限位器、主吊索、螺旋桨推进器安装架、减摇索连接架、螺旋桨推进器、摄像头、对接固定装置、电机、角度传感器、吊放装置远程控制模块和吊放装置无线信号传输模块;
8、a型架的底部两端安装于船舶上,吊索安装架安装于a型架的顶部下表面,吊索移动机构滑动安装于吊索安装架上,第一限位器安装于吊索移动机构上,吊索移动机构连接主吊索的上端,主吊索的下端连接螺旋桨推进器安装架,螺旋桨推进器安装架的下端安装有减摇索连接架,螺旋桨推进器安装架的四周安装有螺旋桨推进器,减摇索连接架连接减摇索的一端,减摇索的另一端与补偿车相连,减摇索连接架的两侧安装有摄像头,减摇索连接架的下部安装有对接固定装置,无人艇上安装有另一个对接固定装置,吊索安装架的两侧、吊索移动机构的下方和对接固定装置中各设置有一个电机。
9、进一步地,吊索移动机构的下方安装有角度传感器,螺旋桨推进器与电机分别与吊放装置远程控制模块相连,摄像头和角度传感器分别与吊放装置无线信号传输模块相连。
10、进一步地,补偿车包括补偿车框架、绞缆机、减摇索、第二限位器、张力传感器、万向轮、固定装置、配重箱、外壳、补偿车无线信号传输模块、补偿车远程控制模块;
11、补偿车框架的内部下方安装有绞缆机和配重箱,绞缆机与减摇索相连,补偿车框架的外部上方安装有第二限位器和张力传感器,补偿车框架的底部四周安装有万向轮,补偿车框架的底部两侧分别安装有一个固定装置,补偿车框架的四周及顶部安装有外壳。
12、进一步地,张力传感器与补偿车无线信号传输模块相连,绞缆机与补偿车远程控制模块相连。
13、进一步地,控制单元包括控制柜、数据接收模块、数据处理模块以及通讯模块,控制柜安装于船舶上,数据接收模块、数据处理模块以及通讯模块安装在控制柜内,数据接收模块用于接收来自吊放装置无线信号传输模块及补偿车无线信号传输模块的数据信息,数据处理模块与数据接收模块相连接,用于输入、输出控制信号,并实时处理控制信号,通讯模块与数据处理模块相连接,用于将控制信号输出至吊放装置及补偿车。
14、较现有技术相比,本发明具有以下优点:
15、本发明提供的一种基于a型架的可移动式无人艇收放运动补偿系统,该系统中采用吊放装置、补偿车以及控制单元之间的配合作用,每个结构间相互联系又独立运行,实现了高稳性、高效率的无人艇吊放作业。与传统作业方式相比,通过应用吊放装置结合可移动式补偿车的绳驱动式减摇并配合控制单元,可以进一步提高无人艇吊放作业的安全性、稳定性及便捷性。
技术特征:1.一种基于a型架的可移动式无人艇收放运动补偿系统,其特征在于,包括:
2.根据权利要求1所述的基于a型架的可移动式无人艇收放运动补偿系统,其特征在于,所述吊放装置(1)包括a型架(11)、吊索安装架(12)、吊索移动机构(13)、第一限位器(14)、主吊索(15)、螺旋桨推进器安装架(16)、减摇索连接架(17)、螺旋桨推进器(18)、摄像头(19)、对接固定装置(27)、电机(111)、角度传感器(112)、吊放装置远程控制模块(113)和吊放装置无线信号传输模块(114);
3.根据权利要求2所述的基于a型架的可移动式无人艇收放运动补偿系统,其特征在于,吊索移动机构(13)的下方安装有角度传感器(112),螺旋桨推进器(18)与电机(111)分别与吊放装置远程控制模块(113)相连,摄像头(19)和角度传感器(112)分别与吊放装置无线信号传输模块(114)相连。
4.根据权利要求1所述的基于a型架的可移动式无人艇收放运动补偿系统,其特征在于,补偿车(2)包括补偿车框架(21)、绞缆机(22)、减摇索(23)、第二限位器(24)、张力传感器(25)、万向轮(26)、固定装置(27)、配重箱(28)、外壳(29)、补偿车无线信号传输模块(210)、补偿车远程控制模块(211);
5.根据权利要求4所述的基于a型架的可移动式无人艇收放运动补偿系统,其特征在于,张力传感器(25)与补偿车无线信号传输模块(210)相连,绞缆机(22)与补偿车远程控制模块(211)相连。
6.根据权利要求1所述的基于a型架的可移动式无人艇收放运动补偿系统,其特征在于,控制单元(3)包括控制柜、数据接收模块、数据处理模块以及通讯模块,控制柜安装于船舶上,数据接收模块、数据处理模块以及通讯模块安装在控制柜内,数据接收模块用于接收来自吊放装置无线信号传输模块(114)及补偿车无线信号传输模块(210)的数据信息,数据处理模块与数据接收模块相连接,用于输入、输出控制信号,并实时处理控制信号,通讯模块与数据处理模块相连接,用于将控制信号输出至吊放装置(1)及补偿车(2)。
技术总结本发明提供一种基于A型架的可移动式无人艇收放运动补偿系统,包括:吊放装置,用于吊放无人艇,所述吊放装置通过吊索移动机构及螺旋桨推进器结合无人艇的方位实时调整吊索位置,利用对接固定装置连接并固定无人艇;控制单元,用于接收无人艇吊放过程中摄像头的视频信息及张力传感器、角度传感器的数据信息,并根据无人艇吊放过程中摄像头的视频信息及张力传感器、角度传感器的数据信息生成相应的控制信号,将控制信号发送至吊放装置和补偿车对吊放装置及补偿车远程控制。本发明通过应用吊放装置结合可移动式补偿车的绳驱动式减摇并配合控制单元,可以进一步提高无人艇吊放作业的安全性、稳定性及便捷性。技术研发人员:王生海,张宸赫,李建,匡祺骥,韩广冬,陈海泉,刘东,魏一,张洪朋,孙玉清受保护的技术使用者:大连海事大学技术研发日:技术公布日:2024/11/14本文地址:https://www.jishuxx.com/zhuanli/20241118/329084.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表