一种速比连续可调的水空两用推进器
- 国知局
- 2024-11-18 18:13:12
本发明涉及水空两用推进器,尤其是涉及一种速比连续可调的水空两用推进器。
背景技术:
1、随着海洋科学的快速发展和人类在海洋中的活动不断多样化,出现了许多新兴的海洋科学和工程需求,包括迫切需要联合海空作业任务。这些任务包括实时观测大气和海洋环境中具有高时空变异性的海洋现象,桥墩损耗检查,海洋救援探测和深海水样采集分析等,相关人员可以及时获得丰富、全面的信息数据,同时对这些事件的发展进行分析和预测。总体来说,这些任务对于实时性的要求较高,需要海空两种介质的数据共享与互通。显然,传统单一介质的飞行器以及潜航器已经无法满足这类新兴任务的需求。因此,可连续跨域穿梭的水空跨域机器(aerial-aquatic vehicle,aav)是实现海空跨域任务的最优解。而实现这种机器的首要问题是其动力机构如何在水空两种介质中都能够运行。由于水的密度和粘度比空气大的多,机器在水中受到的阻力要比在空气中更大,这就要求动力机构从空中转入水中后,能够快速切换状态,以产生能够满足机器在水中航行的动力需求。现阶段水空跨域机器的推进器主要分为三种类型:扑打式推进器、爆发推射式推进器和螺旋桨式推进器。
2、扑打式推进器:在自然界中,水生生物通常利用它们的胸鳍、腹鳍和尾巴的扑打将生物能转化为动能,实现水中的前进运动,另外,它们的胸鳍和腹鳍可实现转向功能,当尾巴急速拍打后,可跃出水面实现生物跨域。2011年,麻省理工学院的团队开发了一种机器飞鱼,这款飞行器动力来源是通过扇动的翅膀在水下移动,并利用翅膀在空中滑翔。2017年,哈佛大学和伦敦帝国理工学院联合团队在哈佛大学研发出功能齐全的微型扑翼,并最终得出结论:在适当的频率下,扑翼在水下具有很大的稳定性,但在空中,由于重力作用的约束,其表现出不稳定性。显然,扑打式推进器若作为水空跨域机器的动力源,其仍有缺陷。
3、爆发推射式推进器:这种类型的执行器的特点是通过化学反应产生爆发能量,进而产生水射流作为推进介质,一般该执行器仅仅用于跨域。2016年,伦敦帝国理工学院的一个团队开发了一种水空跨域原型机,使用压缩二氧化碳作为动力源,形状记忆合金作为气体释放装置,使机器能够模拟飞行乌贼的快速喷射运动。该系统被证明是成功的。2019年,同一个团队开发了另一种使用固体炸药而不是压缩气体作为压力源。虽然压缩气体和固体炸药已被证明是成功的,但它们都有一个共同的缺点。这两个系统都使用不可重复使用的动力源,车辆在没有燃料补给的情况下无法进行跨域运动。
4、螺旋桨式推进器:对比飞机和船舶的螺旋桨可以看出,不同介质的螺旋桨推进器其对于螺旋桨的桨叶需求不同。对于飞行器来说,螺旋桨的桨叶长而窄,因为飞机在空中高速飞行需要极高的空气通量,宽大的桨叶会严重影响空气通量,这意味着飞机会在空中失去升力。船舶使用的螺旋桨其桨叶宽而大,是因为螺旋桨在旋转时会产生空泡现象。空泡破裂形成的微喷流会对执行器直接造成破坏,所以为避免空泡的发生,船舶螺旋桨需要增大桨叶面积。可见,空用和船用螺旋桨的矛盾给水空跨域无人机的设计增加了难度,深圳鹏城实验室和北京航空航天大学的团队对于螺旋桨的设计想法较为相似,他们均采用了一种被动折叠桨叶,当机器处于空中时,桨叶由于惯性作用被动甩开,而没入水中后,水中阻力作用会将螺旋桨折叠,从而使螺旋桨能够完全发挥效能。除螺旋桨的不同外,由于水空两种介质的流体特性差异较大,执行器在水下的扭矩需求远高于空中飞行所需的扭矩,这就决定了以电机为动力输入的推进器需要具备较大范围的输出扭矩,但一般无刷电机并不具有宽范围的扭矩输出能力,为此鹏城实验室研制了一种微型双速水空两用推进器,推进器配备了一个差齿谐波减速机构和两个单向离合轴承,该推进器在空中为小扭矩高转速,而在水中表现为大扭矩低转速。该推进器在空中转入水中后,需要进行模式切换,且切换为水中模式时,差齿谐波减速机构只提供一种减速比,这使得机器无法在水中连续跨域,而需要进行水空模式切换。
技术实现思路
1、本发明的目的就是为了提供一种速比连续可调的水空两用推进器,在采用可变半径的螺旋桨的基础上,通过主动力输入装置、辅助动力输入装置和转速连续变换输出装置,推进器的速比连续可调,可以提供比一般动力机构更宽的扭矩范围,能够快速的切换两种状态。
2、本发明的目的可以通过以下技术方案来实现:
3、一种速比连续可调的水空两用推进器,包括:
4、主动力输入装置;
5、辅助动力输入装置;
6、转速连续变换输出装置,输入端分别连接主动力输入装置和辅助动力输入装置;
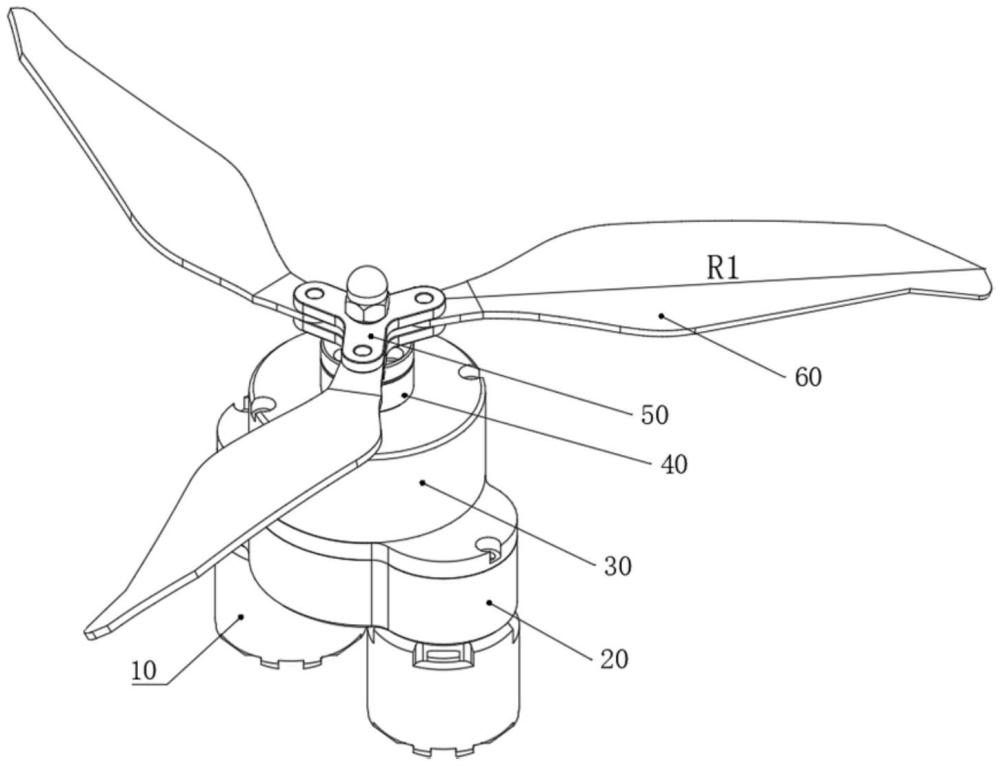
7、依次连接的输出转接盘、叶片自适应转动装置和桨叶,所述输出转接盘的输入端连接至转速连续变换输出装置的输出端;
8、其中,所述转速连续变换输出装置包括太阳轮、太阳轮轴、主传动齿轮、辅助传动齿轮、行星轮、行星架偏轴和内齿圈,
9、所述太阳轮和主传动齿轮均固定套设于太阳轮轴上,所述主传动齿轮和主动力输入装置的输出端连接,所述辅助传动齿轮与辅助动力输入装置连接,所述行星架偏轴固定于辅助动力输入装置的底面上,与辅助动力输入装置的径向截面垂直,所述行星轮套设于行星架偏轴并分别与太阳轮和内齿圈啮合,所述内齿圈连接输出转接盘。
10、所述转速连续变换输出装置还包括壳体,所述壳体包括壳主体、中框和盖,所述壳主体包括第一内腔和分别设于第一内腔两侧并均与第一内腔连通的第二内腔和第三内腔,所述中框扣合于壳主体上并至少封闭所述第二内腔和第三内腔,所述盖扣合于中框上封闭所述第一内腔,所述第一内腔被中框分隔为两个部分,所述太阳轮位于第一内腔近输出转接盘一侧的部分中,所述主传动齿轮位于第一内腔近主动力输入装置一侧的部分中。
11、所述主动力输入装置包括主驱动件、第一传动齿轮和第一深沟球轴承,所述主驱动件包括主驱动轴,所述主驱动轴的输出端穿过所述第一传动齿轮并与第一传动齿轮固定后,通过第一深沟球轴承固定主驱动轴轴线位置,所述第一传动齿轮和主传动齿轮啮合,所述第一传动齿轮位于第一内腔中。
12、所述辅助动力输入装置包括辅助驱动件、第二传动齿轮和第二深沟球轴承,所述辅助驱动件包括辅助驱动轴,所述辅助驱动轴的输出端穿过所述第二传动齿轮并与第二传动齿轮固定后,通过所述第二深沟球轴承固定辅助驱动件轴线位置,所述第二传动齿轮和辅助传动齿轮啮合,所述第二传动齿轮位于第二内腔中。
13、所述行星轮和行星架偏轴均至少设有两个,数量一致且一一对应,各行星轮分别套设于对应的行星架偏轴上。
14、各行星轮环绕于太阳轮周围呈等角度分布。
15、所述转速连续变换输出装置还包括第三深沟球轴承和第四深沟球轴承,所述太阳轮轴近主动力输入装置的一端通过第三深沟球轴承固定,另一端通过第四深沟球轴承固定。
16、所述转速连续变换输出装置包括外部轴承、连续输出轴和第五深沟球轴承,
17、所述内齿圈的外缘通过外部轴承固定于中框中,所述连续输出轴的一端连接内齿圈,另一端通过第五深沟球轴承固定。
18、所述叶片自适应转动装置通过调整桨叶的姿态实现桨叶末端至桨叶转轴中心的距离。
19、当所述主动力输入装置和辅助动力输入装置顺时针旋转时,所述转速连续变换输出装置的输出端为逆时针减速转动;
20、当所述主动力输入装置逆时针旋转、辅助动力输入装置顺时针旋转时,所述转速连续变换输出装置的输出端为逆时针加速转动;
21、当所述主动力输入装置和辅助动力输入装置逆时针旋转时,所述转速连续变换输出装置的输出端为顺时针减速转动;
22、当所述主动力输入装置顺时针旋转、辅助动力输入装置逆时针旋转时,所述转速连续变换输出装置的输出端为顺时针加速转动。
23、与现有技术相比,本发明具有以下有益效果:
24、1、在采用可变半径的桨叶的基础上,通过主动力输入装置、辅助动力输入装置和转速连续变换输出装置,推进器的速比连续可调,可以提供比一般动力机构更宽的扭矩范围,能够快速的切换两种状态。
25、2、可根据主动力输入装置和辅助动力输入装置的不同转速搭配来生成相应的输出转速,所以当主动力输入装置和辅助动力输入装置的转速连续变化时,转速连续变换输出装置的输出转速也可以随之连续变化,同样,其输出扭矩也可根据主动力装置和辅助动力装置的转速不同而变化,可使得本发明在空气介质和水介质交界的跨域过程中实现转速从慢速到快速以及扭矩从大到小的连续变化,进而实现连续跨域。
26、3、上述的壳体的设计,可以提高集成度,减小体积的同时,保持整体的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20241118/327639.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表