一种水下机器人的制作方法
- 国知局
- 2024-11-12 13:42:40
本技术属于水下潜航器,具体涉及一种水下机器人。
背景技术:
1、为了更好地利用海洋资源,通常需要依赖各种先进的技术手段。人类能够依赖船只进行水面上的贸易和捕捞活动,但是对海洋的探索仍然是相对局限的,人类对于水下的探索,限制于人体对水下压强的抵抗能力。基于此,利用各种水下机器人代替人类进行水下作业,往往拥有无法取代的优势。目前,水下机器人在石油开发、地貌勘察、水产养殖、水下船体检修、潜水娱乐、水下管道检测等领域的作用开始显现出来,市场前景开阔,拥有巨大的发展潜力。
2、现有技术中,水下机器人在水下作业过程中,一般采用螺旋桨控制高度的方式,或者通过机器本身添加配重块来平衡水下机器人的重心,以使其能够在水下某一高度持续进行作业,从而达到水下定高巡航的效果。
3、但是,在使用现有技术过程中,发明人发现现有技术中至少存在如下问题:
4、现有技术中,采用螺旋桨控制高度需要依赖电池或者电缆对水下机器人进行供电,而为了避免影响机器人自身的重量,通常不能采用容量太大的电池,由此限制了水下机器人在水中作业的方式,如采用容量适中的电池,由于螺旋桨需要持续工作,导致水下机器人的续航时间大大缩减。而利用配重块实现定高的水下机器人,续航得以提升,但是其只能在单一高度下进行作业,无法满足不同高度作业的需求。
5、因此,有必要研究一种能灵活控制水下作业高度,同时续航时间长的水下机器人。
技术实现思路
1、本实用新型旨在至少在一定程度上解决上述技术问题,本实用新型提供了一种水下机器人及其工作方法。
2、为了实现上述目的,本实用新型采用以下技术方案:
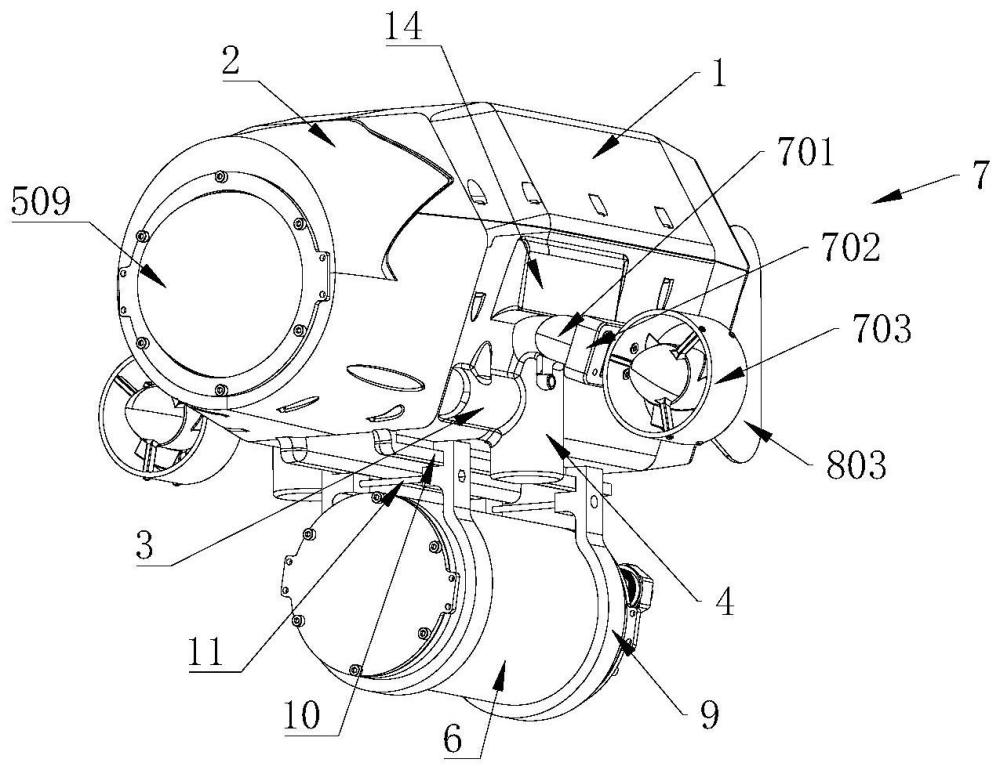
3、第一方面,本实用新型提供了一种水下机器人,包括外壳、装载水箱、进水驱动模块、出水驱动模块、核心舱、电池舱和水下驱动模块;所述装载水箱套设在所述核心舱外,所述进水驱动模块和所述出水驱动模块均与所述装载水箱连通设置,所述外壳套设在所述装载水箱外,所述水下驱动模块和所述电池舱均设置在所述外壳上,且所述电池舱位于所述外壳的底部;所述水下驱动模块、所述进水驱动模块和所述出水驱动模块均与所述核心舱电连接,所述电池舱用于向所述水下驱动模块、所述进水驱动模块、所述出水驱动模块和所述核心舱提供电力支持,所述电池舱和所述核心舱通过脐带接口电连接。
4、在一个可能的设计中,所述水下驱动模块包括水下推进模块和舵装模块,所述水下推进模块包括正浆水下推进模块和反浆水下推进模块,所述正浆水下推进模块和所述反浆水下推进模块分别设置在所述外壳的两侧,所述舵装模块设置在所述外壳的尾部,所述正浆水下推进模块、所述反浆水下推进模块和所述舵装模块均与所述核心舱电连接。
5、在一个可能的设计中,所述水下推进模块包括支架、滑槽块和水下推进器,所述支架与所述外壳的侧壁连接,所述支架远离所述外壳的一端与所述滑槽块连接,所述水下推进器的端部卡设在滑槽块内,所述水下推进器与所述核心舱电连接。
6、在一个可能的设计中,所述舵装模块包括尾舵、尾鳍连接件和尾鳍,所述尾舵设置在所述外壳的尾部,所述尾舵的输出端通过所述尾鳍连接件与所述尾鳍连接,所述尾舵与所述核心舱电连接。
7、在一个可能的设计中,所述水下机器人还包括舱环卡箍,所述舱环卡箍套设在所述电池舱外,所述电池舱的轴心与所述核心舱的轴心平行,所述外壳的下部沿所述核心舱的轴向设置有两个滑轨,所述舱环卡箍的两个箍头分别与两个滑轨滑动连接,且所述舱环卡箍的两个箍头之间通过张紧螺丝连接。
8、在一个可能的设计中,所述核心舱包括核心舱体以及设置在所述核心舱体内的定位柱、固定板、电源模块、主控模块、视觉模块、云台安装板和云台模块;所述定位柱沿所述核心舱体的轴向设置,所述固定板和所述云台安装板均沿所述核心舱体的径向布设,且所述定位柱顺次穿设于所述云台安装板、所述固定板、所述主控模块所在pcb板以及所述电源模块所在pcb板内,所述视觉模块与所述固定板连接,所述视觉模块所在pcb板沿所述核心舱体的轴向布设,所述云台模块设置在所述云台安装板上,所述核心舱体的前端部配合所述云台模块设置透明面罩;所述水下驱动模块、所述进水驱动模块、所述出水驱动模块、所述视觉模块和所述云台模块均与所述主控模块电连接。
9、在一个可能的设计中,所述电源模块和所述主控模块板对板连接。
10、在一个可能的设计中,所述装载水箱沿所述核心舱的径向截面设置为倒u型,所述装载水箱套设在所述核心舱的上部;所述进水驱动模块和所述出水驱动模块均设置有两组,且两组进水驱动模块和出水驱动模块分别配合设置在所述装载水箱的两侧。
11、在一个可能的设计中,所述装载水箱的任一侧均配合对应组的进水驱动模块和出水驱动模块开设有进水口和出水口,所述进水口和所述出水口均开设在所述装载水箱的底部,所述进水口和所述出水口位于同一进出水平面,且所述装载水箱的底部的前后两端部均由靠近所述进出水平面向远离所述进出水平面的一侧向上倾斜设置。
12、在一个可能的设计中,所述核心舱的前端部设置有半球型的透明面罩,所述外壳的径向截面设置为六边形,所述装载水箱的前端部的外径以及所述外壳的前端部的外径均由靠近核心舱头部的一侧向远离所述核心舱头部的一侧逐渐增加,所述外壳的前端部靠近所述装载水箱的中部设置,所述外壳的后端部的外径由靠近核心舱头部的一侧向远离所述核心舱头部的一侧逐渐减小。
13、第二方面,本实用新型提供了一种如上述任意一项所述的水下机器人的工作方法,包括:基于所述核心舱内的主控模块执行,所述核心舱内还设置有云台模块和深度感应模块,所述水下驱动模块、所述进水驱动模块、所述出水驱动模块、所述云台模块和所述深度感应模块均与所述主控模块电连接;所述水下机器人的工作方法包括:
14、接收到绑定有下潜设定深度的下潜指令时,获取所述深度感应模块采集的当前潜水深度;
15、根据所述下潜设定深度和所述当前潜水深度,输出进水驱动指令至所述进水驱动模块,或输出排水驱动指令至所述出水驱动模块,以便所述进水驱动模块或所述出水驱动模块动作,直到当前潜水深度与所述下潜设定深度一致;
16、接收到绑定有航线信息的巡航指令时,根据所述航线信息输出运行驱动指令至所述水下驱动模块,以便所述水下驱动模块动作,使得所述水下机器人沿与所述航线信息对应的航线运行;
17、实时获取所述云台模块采集的水下图像,并对所述水下图像进行分析处理,得到处理后水下图像。
18、在一个可能的设计中,对所述水下图像进行分析处理,得到处理后水下图像,包括:
19、对所述水下图像进行图像增强处理,得到增强后图像;
20、对所述增强后图像进行边缘检测和提取处理,得到处理后水下图像。
21、本实用新型的有益效果为:
22、本实用新型公开了一种水下机器人,可以通过水泵灵活控制装载水箱的注水量,从而可在水下机器人定高巡航的作业过程中,灵活调整水下机器人在水中的高度,同时可使得续航时间大大增加。具体地,本实用新型可通过所述进水驱动模块向装载水箱内泵入水,或通过所述出水驱动模块将装载水箱内的水泵出,基于该装载水箱的设置,可在水下自主改变水下机器人自身的重量,从而控制水下机器人在不同高度下的定高作业;同时,相对于同类型的小型螺旋桨作业的机器人来说,由于本实用新型中水下机器人的定高控制通过调节装载水箱的进出水量实现,无需依赖螺旋桨控制高度,减少了螺旋桨工作的时间,使得本实用新型的水下机器人续航时间更长;此外,本实用新型中,核心舱和电池舱分离设置,可利于实现电池舱或电池舱内供电电池的快速更换,进一步满足水下机器人在户外长时间作业的需求。
23、本实用新型的其他有益效果将在具体实施方式中进一步进行说明。
本文地址:https://www.jishuxx.com/zhuanli/20241112/325778.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表