一种静力触探设备自动投放设备的制作方法
- 国知局
- 2024-11-06 14:31:51
本发明涉及海洋工程地质设备,具体涉及一种静力触探设备自动投放设备。
背景技术:
1、海洋静力触探是一种用于海底地质勘探的技术。这项技术通过将一种特殊的设备——静力触探器(也称为静力触探仪或静力探针),直接插入海底沉积物中来获取有关海底土壤特性的数据;这种技术广泛应用于海洋工程、石油勘探、电缆铺设等领域,对于了解海底地形地貌和地质结构具有重要意义。
2、例如申请号:cn202011495524.4公开了一种海底多点位静力触探装备,包括:水下升沉移动单元,所述的水下升沉移动单元包括支撑框架、导向架、船式浮筒,所述的导向架竖直固定在所述支撑框架上,所述船式浮筒对称布置在所述导向架上,用于提供升沉力;cptu探杆组件,所述cptu探杆组件安装在所述支撑框架上,由导向架导向;液压推进系统,用于给所述cptu探杆组件提供贯入力。
3、又如申请号:cn201610039656.3公开了一种潜水式海洋静力触探机。本潜水式海洋静力触探机,包括海底架和固连于海底架上的由滑轮与钢丝索构成的起吊结构,海底架内穿设有其下端伸出至海底架下侧的探杆,探杆的下端设有静探探头,海底架上设有用于驱动探杆贯入或起拔的连续贯入液压系统,该连续贯入液压系统上设有在贯入或起拔时用于卡住探杆的卡杆器,海底架上还设有潜水液压控制单元和测斜与电控单元,连续贯入液压系统与该潜水液压控制单元连接。
4、可见现有的静力触探设备的投放设备均为与投放船舶持续保持连接才可进行海底数据采集,并且船舶上也是必须要有操作人员驾驶并且直接操作静力触探设备进行数据采集。而实际进行静力触探设备投放时,经常需要进出环境复杂和较为恶劣的海况区域,人员在船舶上也会面临一定的危险。鉴于以上,有必要提出一种静力触探设备自动投放设备来解决上述问题。
技术实现思路
1、本发明的目的在于,克服现有技术中存在的缺陷,提供一种静力触探设备自动投放设备。
2、为实现上述目的,本发明的技术方案如下:一种静力触探设备自动投放设备,包括静力触探设备,包括无人艇,所述静力触探设备设置于无人艇上并通过投放分系统进行投放;
3、还包括平台系统和载荷系统;其中平台系统包括艇体分系统和航控分系统;载荷系统包括静力触探设备和投放分系统;
4、所述投放分系统包括抱持机构、投放机构;
5、抱持机构,其被配置在船体投放部周围并且具有与静力触探设备相配合的定位端,形成周向环抱式对静力触探设备进行固定;
6、投放机构,通过自动脱钩装置连接在静力触探设备上并控制设备从船体下落至海底预定位置,自动脱钩装置控制静力触探设备与船体分离。
7、进一步的,所述无人艇的中部设有月池,所述月池供静力触探设备定位或经月池下落至海底。
8、进一步的,所述抱持机构包括多个电动推杆结构,并且电动推杆结构分布设置在月池的四周,电动推杆结构的自由端设有抱持块,抱持块卡入静力触探设备表面的卡固位内对其固定。
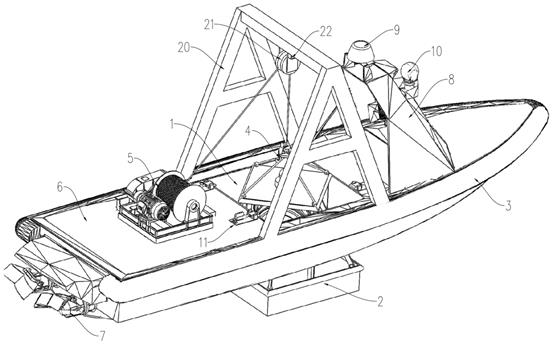
9、进一步的,所述投放机构包括卷扬机、吊架、滑轮、自动脱钩装置,所述卷扬机设置在无人艇上,所述吊架设置于月池上侧,卷扬机通过钢丝绳牵引静力触探设备,钢丝绳绕过吊架上的滑轮,钢丝绳端部连接自动脱钩装置,还包括拉力传感器,所述拉力传感器设置于滑轮上并检测钢丝绳施作用于滑轮上的拉力并以此作为释放静力触探设备的触发信号。
10、进一步的,所述静力触探设备包括框架体、卷盘、探头、卫星通信装置,所述框架体内转动设有卷盘,框架体底部设有探头,框架体顶部设有可以释放的卫星通信装置,所述卷盘上卷绕设有电缆,电缆的一端与卫星通信装置连接,另一端与探头相连接。
11、进一步的,所述艇体分系统包括艇体、动力系统、电气系统、桅杆,所述艇体为深v型线型船体,艇体中部设有月池,艇体采用真空导入一次成型制作,所述动力系统包括设置于艇体尾部的双喷水泵,桅杆置于无人艇前部,安装有无线通信天线、舷灯、导航雷达、激光雷达、摄像头、定位天线。
12、进一步的,所述航控分系统包括环境感知模块、智能导航与避障模块、电源管理模块、多源数据融合及管理模块、无线通讯与控制模块、导航定位模块、安全与故障诊断模块、底层驱动执行控制模块、岸基/母船控制模块;
13、所述环境感知模块包括对水面上以及水面下的障碍物的探测,结合海图建立无人艇航行的地图;
14、智能导航与避障模块包括对油门、舵机的伺服控制,动力系统数据获取,按照制动路径自主航行、碰撞规避、航行姿态控制;
15、多源数据融合及管理模块通过控制中心与各种测量设备连接并数据通传;
16、导航定位模块包括获取定位信息,并通过数据解析和融合,将导航定位数据发送至其他模块。
17、一种静力触探设备自动投放设备的投放方法,包括以下步骤:
18、s1:根据岸基或母船的下达的指令要求,无人艇可以按照预设的规划路线或者自主规划路线行驶到指定位置,并保持悬停;
19、s2:投放分系统自动或远程控制使抱持机构松开,卷扬机将静力触探设备下放;
20、s3:静力触探设备到达海底后,根据拉力传感器的信号,自动脱钩装置控制钢丝绳与静力触探设备脱开,控制卷烟机反转回收钢丝绳;
21、s4:钢丝绳回收完毕后,无人艇驶离;
22、s5:静力触探设备工作并采集相关数据信息;
23、s6:静力触探设备的卷盘释放,使顶部的卫星通信装置上浮至水面,便于与卫星连接进行数据回传。
24、本发明的优点和有益效果在于:本发明通过在无人艇上设置月池来投放静力触探设备,这一设计有效地提高了操作的安全性和稳定性。静力触探设备在无人艇上时,部分放置于月池中,以确保其稳定性;并通过保持机构可以将静力触探设备牢固的固定在无人艇上,当到达预定的检测海域后,抱持机构解锁,使静力触探设备投放到海底,投放中,通过自动脱钩装置将钢丝绳与其进行分离,然后无人艇驶回,这种设计不仅增强了静力触探设备的投放精度和安全性,还减少了操作人员的工作强度和风险。通过远程控制和自动化设备的结合,无人艇能够在复杂和恶劣的海况下高效地完成海洋地质监测任务。这一方案的实施,不仅提升了我国海洋地质监测的自动化水平,还为进一步的海洋科学研究和资源开发提供了坚实的技术保障。
技术特征:1.一种静力触探设备自动投放设备,包括静力触探设备,其特征在于,包括无人艇,所述静力触探设备设置于无人艇上并通过投放分系统进行投放;
2.根据权利要求1所述的一种静力触探设备自动投放设备,其特征在于,所述无人艇的中部设有月池,所述月池供静力触探设备定位或经月池下落至海底。
3.根据权利要求2所述的一种静力触探设备自动投放设备,其特征在于,所述抱持机构包括多个电动推杆结构,并且电动推杆结构分布设置在月池的四周,电动推杆结构的自由端设有抱持块,抱持块卡入静力触探设备表面的卡固位内对其固定。
4.根据权利要求2所述的一种静力触探设备自动投放设备,其特征在于,所述投放机构包括卷扬机、吊架、滑轮、自动脱钩装置,所述卷扬机设置在无人艇上,所述吊架设置于月池上侧,卷扬机通过钢丝绳牵引静力触探设备,钢丝绳绕过吊架上的滑轮,钢丝绳端部连接自动脱钩装置,还包括拉力传感器,所述拉力传感器设置于滑轮上并检测钢丝绳施作用于滑轮上的拉力并以此作为释放静力触探设备的触发信号。
5.根据权利要求1所述的一种静力触探设备自动投放设备,其特征在于,所述静力触探设备包括框架体、卷盘、探头、卫星通信装置,所述框架体内转动设有卷盘,框架体底部设有探头,框架体顶部设有可以释放的卫星通信装置,所述卷盘上卷绕设有电缆,电缆的一端与卫星通信装置连接,另一端与探头相连接。
6.根据权利要求1所述的一种静力触探设备自动投放设备,其特征在于,所述艇体分系统包括艇体、动力系统、电气系统、桅杆,所述艇体为深v型线型船体,艇体中部设有月池,艇体采用真空导入一次成型制作,所述动力系统包括设置于艇体尾部的双喷水泵,桅杆置于无人艇前部,安装有无线通信天线、舷灯、导航雷达、激光雷达、摄像头、定位天线。
7.根据权利要求1所述的一种静力触探设备自动投放设备,其特征在于,所述航控分系统包括环境感知模块、智能导航与避障模块、电源管理模块、多源数据融合及管理模块、无线通讯与控制模块、导航定位模块、安全与故障诊断模块、底层驱动执行控制模块、岸基/母船控制模块;
8.根据权利要求1-7任意一项所述的一种静力触探设备自动投放设备的投放方法,其特征在于,包括以下步骤:
技术总结本发明公开了一种静力触探设备自动投放设备,包括静力触探设备,包括无人艇,静力触探设备设置于无人艇上并通过投放分系统进行投放;抱持机构,其被配置在船体投放部周围并且具有与静力触探设备相配合的定位端,形成周向环抱式对静力触探设备进行固定;投放机构,通过自动脱钩装置连接在静力触探设备上并控制设备从船体下落至海底预定位置,自动脱钩装置控制静力触探设备与船体分离。本发明通过在无人艇上设置月池来投放静力触探设备,有效地提高了操作的安全性和稳定性。静力触探设备在无人艇的月池中确保其稳定性;并通过保持机构可以将静力触探设备牢固的固定在无人艇上,当到达预定的检测海域后,抱持机构解锁,使静力触探设备投放到海底。技术研发人员:章丹君,顾中达,蒋徐洋受保护的技术使用者:江阴市北海救生设备有限公司技术研发日:技术公布日:2024/11/4本文地址:https://www.jishuxx.com/zhuanli/20241106/322659.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表