一种水下测绘用无人潜艇的制作方法
- 国知局
- 2024-11-06 14:29:30
本发明涉及水域测绘,具体涉及一种水下测绘用无人潜艇。
背景技术:
1、水下地形测绘所使用的方法包括卫星测绘以及无人潜艇测绘两种,而使用最广的是卫星测绘,无人潜艇测绘则是用于不具备卫星测绘条件的水域地形测绘使用。
2、针对无人潜艇测绘的应用,参考公开(公告)号:cn102162861a,公开(公告)日:2011-08-24,公开的一种基于太赫兹成像探测水下目标的方法及装置,该装置由连续太赫兹光源、滤波器、准直透镜、会聚透镜、光电探测器、控制器、计算机顺序连接组成,其探测方法是:用一种近红外的激光器去泵浦特定晶体获得的太赫兹连续光源,经准直透镜和滤波器调制成窄带太赫兹平行波以近似垂直的角度射入到水下,经水下目标物反射后通过水面以上的会聚透镜,再会聚到光电探测器和控制器,经计算机处理后即得到水下目标物的二维图像。本发明的优点是:太赫兹辐射在水中传输衰减较小,用太赫兹成像探测水下目标可以减少对水环境的依赖以及提高探测精度,该方法可用于探测识别暗礁、潜艇、鱼群、水雷、失事船只,以及测绘海底地貌等。
3、以及,公开(公告)号:cn115629390a,公开(公告)日:2023-01-20,公开的一种基于多波束声纳和边缘计算的地形测绘系统,系统包括云端服务器、移动模块、主控模块、多波束声纳模块和照明拍摄模块,云端服务器设置在岸上固定站点,移动模块为水上船只或水下潜艇,移动模块用于携带主控模块、多波束声纳模块和照明拍摄模块,多波束声纳模块用于探测成像,形成三维地形图,照明拍摄模块则用于拍摄成像;移动模块上设置有罗经及运动传感器,罗经及运动传感器用于检测移动模块的行径方向和行径速度,主控模块包括通信连接的主控机和边缘服务器,主控机连接有定位设备,通信盒通过网线与主控机连接,照明拍摄模块包括水下照明灯和水下摄像机,水下摄像机与边缘服务器连接。
4、在包括上述两个专利的现有技术中,光电探测和声波探测是主要手段,受水域反射条件,声波的探测应用最广,而在测绘的时候,无人潜艇是处于前进状态的,虽然射波传输的速率很快,特别是因为特殊的地形,比如有错落地形的地貌,则接收第一波回波之后,还会再次反馈第二回波,而第二回波则会被直接忽略,所以地形的探视宽度有限。
技术实现思路
1、本发明的目的是提供一种水下测绘用无人潜艇,用于解决上述问题。
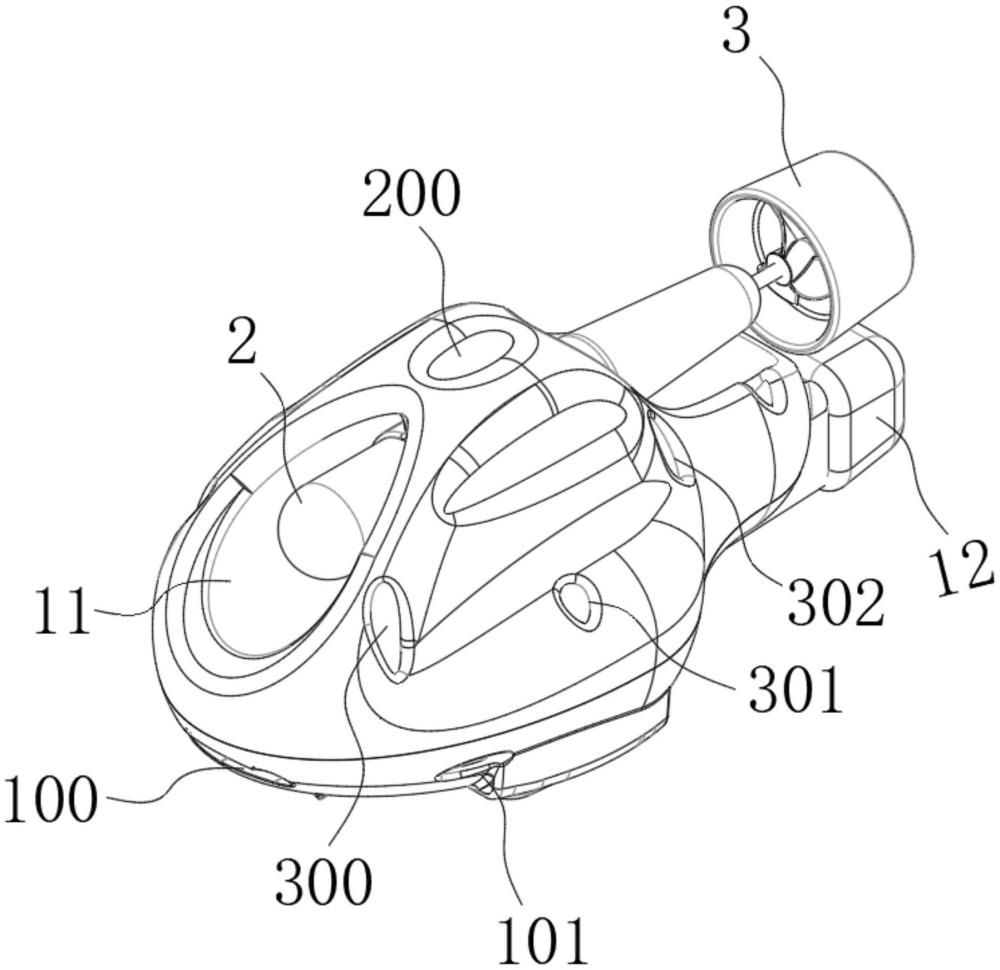
2、为了实现上述目的,本发明提供如下技术方案:一种水下测绘用无人潜艇,包括本体,所述本体的正面开设有贯穿至背面的中心隧道孔,所述中心隧道孔内设置有居中布置的鱼雷件,所述鱼雷件的尾部设置有延伸至所述本体背面的推进桨叶组件;
3、所述本体为蛋形结构,且根据结构分为为正面的窄端和为尾端的宽端;
4、所述窄端的顶部设置有潜水探头,由所述窄端顶点向两侧分别设置有关于所述潜水探头中心对称布置的水下探照灯;
5、所述本体的顶部设置有gps模块;
6、所述由所述窄端顶点向两侧的侧壁分别设置有超声波发射器,以及由窄端至宽端居中位置和宽端布置的第一超声波接收器和第二超声波接收器。
7、作为优选的,所述本体的尾部设置有所述推进桨叶组件规格一致的尾舱,所述尾舱内设置有鼓风机,所述鼓风机的输出端与所述尾舱相对两侧的出气格栅连通,并通过电磁阀可使鼓风机与任一侧所述出气格栅连通。
8、作为优选的,所述中心隧道孔内开设有进液口,所述进液口分别与所述本体内对称设置的浮沉控制机构通过电磁阀连接;
9、所述浮沉控制机构包括圆周半径可调的复合舱体以及驱使所述复合舱体圆周可调的驱动组件;
10、所述复合舱体至少包括多个呈圆周阵列布置的钣金件;
11、所述驱动组件至少包括多个驱使多个所述钣金件轴径方向运动的拨杆。
12、作为优选的,所述复合舱体包括软性橡胶瓣,所述软性橡胶瓣的两端分别与两个所述钣金件连接;
13、两个所述钣金件相邻一端分别设置有上弧形板和下弧形板,所述下弧形板上设置有环扣,所述环扣与上弧形板滑动连接;
14、所述软性橡胶瓣由两个对称布置的橡胶件组成,且上弧形板和下弧形板位于两个所述橡胶件之间。
15、作为优选的,所述驱动组件包括固定设置的三角基板,所述三角基板上转动设置有被电机驱动旋转的旋转板件;
16、所述拨杆的第一端与所述三角基板的一个顶点相装配,而旋转板件的一个顶点转动设置有第一连杆,所述第一连杆的一端与所述拨杆转动连接。
17、作为优选的,所述三角基板的一个顶点对称设置有沿轴线布置的第二连杆和第三连杆,所述第二连杆和第三连杆均与所述拨杆的第一端相连接,且拨杆与所述第三连杆为同轴。
18、作为优选的,其中一个所述三角基板的三个顶点分别固定设置的支撑臂,且复合舱体圆周半径最小时,所述支撑臂的端部与所述复合舱体内壁接触;
19、多个所述支撑臂的端部设置有弧形穹盖,所述弧形穹盖的弧顶开设有入水口;
20、所述弧形穹盖的内侧面朝向所述三角基板一侧布置,所述弧形穹盖的内侧面设置有多个呈圆周阵列布置的区臂;
21、多个所述区臂的端部设置有半球形罩体,所述半球形罩体的半径大于所述入水口的半径;
22、所述半球形罩体的外侧面为螺旋状。
23、作为优选的,所述区臂为七字形结构的弹性金属件,多个所述区臂的顶点的朝向轴心。
24、一种水下测绘用无人潜艇的测量方法,应用于上述方案中所述的水下测绘用无人潜艇,包括以下步骤:
25、s01、以本体为原点,建立坐标系,所述坐标系包括x轴和y轴,其中,所述y轴包括关于x轴中心对称分布的y1和y2;
26、s02、设每个角度中任意一个角度的距离值为li,li对应的角度与y1轴的夹角为ai,与y2的夹角为bi,li对应的地形上的点的坐标值为(x
27、,y1)和(x,y2),则:
28、y1=sqrt{li^2-[distance*cos(ai)]^2}*sin(x);
29、y2=sqrt{li^2-[distance*cos(bi)]^2}*cos(x);
30、以计算获得所述每个角度对应的地形上的点的坐标值;
31、s03、采用polygen方式模型基于每个角度对应的地形上的点的坐标值生成模型,p(m)=p(x|y2)p(y1),其中:p(m)表示模型的点面分布,p(y1)表示顶点,p(x|y2)表示以顶点为条件的面。
32、作为优选的,在所述步骤s03中生成的模型基于本体为原点的坐标系中基于多层次i/o技术生成模型的数据进行效验,以完成模型数据分景处理。
33、在上述技术方案中,本发明提供的一种水下测绘用无人潜艇,具备以下有益效果:利用gps模块获取实时的本体定位数据,并且超声波发射器和潜水探头二者配合,实现对以本体为原点的坐标系的地形地貌的测绘,利用沿着本体船体侧向由正面到背面依次设置的第一超声波接收器和第二超声波接收器配合进行两次回波的吸收,从而使得增大地形的探视宽度。
本文地址:https://www.jishuxx.com/zhuanli/20241106/322399.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。