一种仿生魟鱼机器人
- 国知局
- 2024-11-06 14:29:21
本发明涉及水下仿生机器人,更具体地,涉及一种仿生魟鱼机器人。
背景技术:
1、近年来,随着水下各种资源的开发、水下生物科考探索、水下管道探测和巡检等领域对水下机器人的需求日益增长,水下机器人的研究得到快速发展。传统的水下机器人多采用螺旋桨作为推进方式,但是该方式仍存在不足之处:在复杂的水体环境中工作时,螺旋桨容易被杂物缠绕,导致堵转;螺旋桨运作时,会有较大的尾流以及噪声,隐蔽性较差,无法很好的胜任水下科考以及一些侦察任务。
2、为了更好的胜任水下科考及侦查任务,现有技术中模拟水中游动的鱼类研发了水下仿生机器人,水下仿生机器人模仿鱼类用尾巴进行摆动的推动式前进方法,与螺旋桨驱动的方式相比,虽然机器人的推进效率有小幅度降低,但是明显减小了尾流和噪音的产生,并且还减小了被水中杂物缠绕的概率。但是,水下仿生机器人在深水区执行水下生物科考探索任务的过程中,发现推动式前进方法的水下仿生机器人在前进过程中,对深水环境的扰动会增加水下生物的警惕性,难以很好的在深水区执行水下生物的科考探索任务。
技术实现思路
1、本发明为克服上述现有技术中推动式前进方法的水下仿生机器人在前进过程中鱼尾摆动对深水环境产生的扰动会增加水下生物的警惕性,难以很好的在深水区执行水下生物科考探索任务的问题,提供一种仿生魟鱼机器人,本方案的仿生机器人采用模拟魟鱼胸鳍的波动式推进方式前进,能够进一步降低运动时对环境的扰动,降低水下生物的警惕性,在深水区能够顺利执行水下生物的科考探索任务。
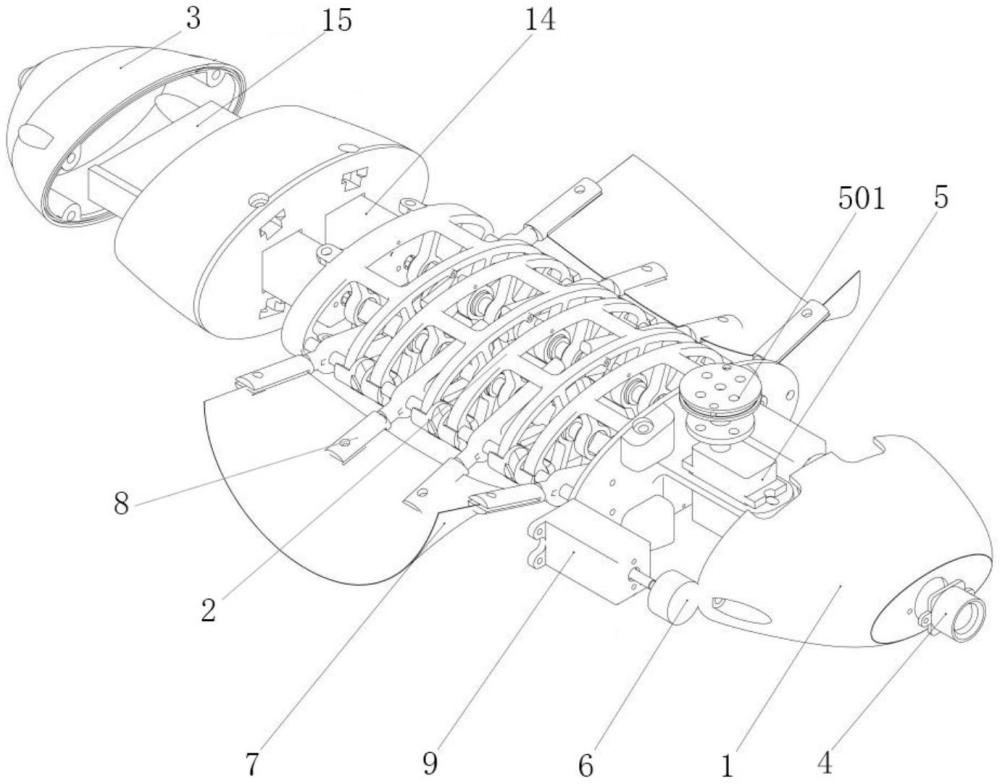
2、为解决上述技术问题,本发明采用的技术方案是:一种仿生魟鱼机器人,包括依次连接的头部、躯干和尾部,头部设有摄像头、舵机和飞轮,舵机与躯干连接,躯干两侧均设有鳍片,鳍片通过摆动部与躯干连接,摆动部的一端与鳍片固定连接,另一端与躯干转动连接,飞轮有两个,两个飞轮分别位于躯干的两侧,尾部设有驱动部和控制部,驱动部与摆动部连接用以驱动摆动部运动,控制部与摄像头、舵机、飞轮和驱动部电连接。
3、魟鱼机器人工作时,科研人员通过控制单元远程向控制部发送信息,控制孔控制魟鱼机器人在深水区执行水下生物的科考任务。控制部控制驱动部工作,驱动部收到控制部的控制命令后,开始工作,驱动摆动部在躯干上进行转动,摆动部在转动时带动鳍片运动,使得鳍片呈波浪形摆动,鳍片的波浪形摆动带动魟鱼机器人在深水区运动。魟鱼机器人头部的摄像头能够获取深水区的水下生物图像和水下环境,并通过控制部将获取的图像信息传递给科研人员。
4、当需要魟鱼机器人向前运动时,驱动部控制躯干两侧的摆动部正向转动,躯干两侧的鳍片正向摆动,魟鱼机器人向前运动;当需要魟鱼机器人向后运动时,驱动部控制躯干两侧的摆动部反向转动,躯干两侧的鳍片反向摆动,魟鱼机器人向后运动。当需要魟鱼机器人向左转向时,控制部向驱动部发送命令,控制部控制躯干两侧的摆动部进行摆动,使躯干左侧摆动部的转动速度大于躯干右侧摆动部的转动速度,魟鱼机器人左侧鳍片的摆动速度大于右侧鳍片的摆动速度,实现魟鱼机器人的向左差速转向。同理,当需要魟鱼机器人向右转向时,控制部向驱动部发送控制命令,驱动部根据控制命令驱动魟鱼机器人躯干的右侧摆动部转动速度大于左侧摆动部的转动速度,魟鱼机器人右侧鳍片的摆动速度大于左侧鳍片的摆动速度,实现魟鱼机器人的向右差速转向。当需要魟鱼机器人向上运动时,舵机控制躯干向上弯曲,鳍片摆动时魟鱼机器人向上运动;当需要魟鱼机器人向下运动时,舵机控制躯干向下弯曲,鳍片摆动时魟鱼机器人向下运动。当控制部识别到魟鱼机器人出现向左偏转时,控制部控制躯干右侧的飞轮转动,飞轮转动产生的角动量平衡抵消魟鱼机器人的左侧偏转,魟鱼机器人恢复平衡。同理,当控制部识别到魟鱼机器人向右偏转时,躯干左侧的飞轮转动,飞轮转动产生的角动量平衡递交魟鱼机器人的右侧偏转,魟鱼机器人恢复平衡。
5、本方案中的魟鱼机器人在深水区执行水下生物的科考探索任务时,魟鱼机器人通过鳍片的摆动进行运动,鳍片摆动时产生的波动不会对深水环境进行扰动,不会引起深水生物的警惕,使得魟鱼机器人能够在深水区顺利执行水下生物的科考探索任务。同时,本方案的魟鱼机器人还设置有飞轮,设置飞轮后还能够避免魟鱼机器人在运动时出现偏转,使得仿生魟鱼机器人能够顺利进行科考探索任务。
6、优选的,还包括飞轮电机,飞轮电机用以驱动飞轮运动,飞轮电机与控制部电连接,飞轮电机的驱动端与飞轮固定连接,飞轮通过飞轮电机与控制部电连接。控制部通过飞轮电机控制飞轮进行转动,不但能够控制飞轮的转动方向,还能够根据魟鱼机器人的偏转程度调整飞轮的转动速度,当机器人的偏转程度更大时,飞轮的转动速度更大。
7、优选的,躯干包括若干个依次连接的骨架,躯干两端的骨架分别与头部和尾部连接,相邻两个骨架通过连接部进行连接,骨架上设有转轴和偏心件,摆动部穿过转轴并与转轴转动连接,摆动部上远离鳍片的一端设有卡槽,偏心件与骨架转动连接,偏心件上的位于卡槽内并与卡槽滑动连接,相邻两个骨架上的偏心件通过驱动轴连接,驱动部与躯干上靠近尾部的骨架内的偏心件连接。驱动部驱动躯干尾部骨架内的偏心件转动时,偏心件通过驱动轴将运动依次传递给躯干内的所有偏心件,所有的偏心件同步转动。偏心件转动的同时,会在卡槽内进行滑动,并且随着偏心件的转动,会通过卡槽带动摆动部进行转动,摆动部在偏心件的带动下,绕着骨架上的转轴进行转动,摆动部转动带动鳍片摆动。
8、优选的,连接部包括两个卡接段和一个连接段,两个卡接段分别位于连接段的两端,卡接段上设有卡槽,卡槽与骨架过盈配合,卡接段的材质为pla材质,连接段的材质为tpu材质,舵机上设有舵机盘,舵机盘上缠绕有连接绳,连接绳依次穿过骨架。连接部两端卡接段上的卡槽能够卡接相邻的两个骨架,完成相邻两个骨架的连接。卡接段采用pla材质,pla材质为聚乳酸塑料,pla材质与传统塑料相似,具有良好的韧性、机械强度和热稳定性。同时,是可生物降解的材料,不含有毒害物质,不会对环境造成污染。连接端采用tpu材质,tpu材质为热塑性聚氨酯弹性体橡胶,具有硬度高、机械强度高、再生利用性好的优点,夹持骨架的连接强度高。舵机控制舵机盘旋转,舵机盘的旋转能够控制连接绳的松紧,当舵机盘正向旋转时,将连接绳缠绕在舵机盘上,连接绳将骨架进行收紧,卡接段发生变形,躯干弯曲,便于仿生魟鱼机器人进行转向。
9、优选的,相邻两个骨架之间还设有弹性件,弹性件的两端分别与相邻的两个骨架固定连接。在相邻的两个骨架之间设置弹性件,弹性件的设置能够使得相邻两个骨架之间存在间隙,当通过连接绳来控制躯干弯曲后,相邻的两个骨架会对弹性件进行压缩,当连接绳复位后,弹性件能够驱动骨架复位。
10、优选的,驱动部包括两个驱动电机,两个驱动电机分别用以驱动所述躯干两侧的鳍片运动,驱动电机的驱动端与偏心件连接。驱动部通过两个驱动电机分别区别躯干两侧的摆动部,进而实现躯干两侧鳍片的分别控制。
11、优选的,相邻两个偏心件的偏转角度为45°-70°。相邻两个偏转件之间存在角度差,使得不同两个偏转件转动时存在角度差,进而使相邻两个摆动部之间存在相位角,鳍片在运动时呈波浪形。经实验证明,当相邻两个偏心件的偏转角度为45°-70°,机器人的运动更稳定。
12、优选的,转轴的两端均设有方形凸起,连接部的端部设有方形凹槽,转轴穿过骨架时,转轴两端的方形凸起伸入骨架两侧连接部上的方形凹槽内,方向凸起与方形凹槽过盈配合。相邻的两个连接部之间还通过转轴进行连接,能够进一步提升连接部和骨架之间的连接强度,避免机器人的躯体出现散落崩溃的情况。
13、优选的,控制部包括tb6612fng电机驱动模块、stm32f103单片机、v851s芯片、陀螺仪mpu6050、和lora无线通讯模块,tb6612fng电机驱动模块、v851s芯片、陀螺仪mpu6050和lora无线通讯模块均与stm32f103单片机电连接,tb6612fng电机驱动模块还与驱动部电连接,v851s芯片还与摄像头电连接。陀螺仪能够监测魟鱼机器人是否发生偏转,操作人员通过lora无线通讯向stm32f103单片机发送信号,stm32f103单片机也通过lora无线通讯向操作人员发送魟鱼机器人的探索结果。v851s芯片与摄像头电连接并将摄像头的画面信号传递给stm32f103单片机,stm32f103单片机将画面信号通过lora无线通讯向操作人员进行传递。stm32f103单片机还能够控制tb6612fng电机驱动模块来控制驱动部运动。
14、优选的,头部和尾部均设有弧形外壳,舵机和飞轮均位于头部的弧形外壳上,驱动部和控制部均位于尾部的弧形外壳上。仿生魟鱼机器人的两端均设置弧形外壳,弧形外壳在进行前进或后退时,水体对魟鱼机器人的前进阻力更小,更便于魟鱼机器人在水体内进行运动。
15、与现有技术相比,本发明的有益效果是:本方案中的魟鱼机器人在深水区执行水下生物的科考探索任务时,魟鱼机器人通过鳍片的摆动进行运动,鳍片摆动时产生的波动不会对深水环境进行扰动,不会引起深水生物的警惕,使得魟鱼机器人能够在深水区顺利执行水下生物的科考探索任务。同时,本方案的魟鱼机器人还设置有飞轮,设置飞轮后还能够避免魟鱼机器人在运动时出现偏转,使得仿生魟鱼机器人能够顺利进行科考探索任务。
本文地址:https://www.jishuxx.com/zhuanli/20241106/322378.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表