一种试验用主动船舶艏翼攻角控制方法及系统与流程
- 国知局
- 2024-11-06 14:49:27
本发明涉及船舶艏翼攻角控制,具体涉及一种试验用主动船舶艏翼攻角控制方法及系统。
背景技术:
1、如今全球变暖问题愈发严重,为了解决这个问题,人们正在寻找降低温室气体排放的方法。其中水运作为人类重要的运输方式之一,船舶的温室气体排放量也需要降低。因此人们想到一种方式,将一个带角度的水翼安装在船舶艏部,通过利用波浪能的方式辅助船舶推进,从而达到即使减小船舶发动机输出功率,也能达到目标航速的目的,因为发动机功率减小,所以可以有效降低温室气体的排放量。目前研究较多的为固定攻角和被动改变攻角的水翼,例如,现有的方案一种是通过侦测来流波浪角来改变水翼攻角,另一种是在艏部安装加速度计来侦测艏部运动从而控制改变水翼攻角。这两种方案的结构都十分复杂,需要额外设计并安装大量配件,同时也要考虑防水和控制系统编程问题,这都大大增加了试验准备阶段和测试阶段的工作量,并且容易损坏。
2、因此,如何提供一种能避免上述弊端的试验用主动船舶艏翼攻角控制方法便成为了本领域技术人员急需解决的技术问题。
技术实现思路
1、为实现上述目的,本发明提供一种试验用主动船舶艏翼攻角控制方法及系统,使用外部设备来侦测船模的运动状态,如动态捕捉系统,并在实验室范围内建立局域网,通过局域网连接动态捕捉系统与船模,构件一个感知-规划-动作模型。具体技术方案如下:
2、一种试验用主动船舶艏翼攻角控制方法,包括如下步骤:
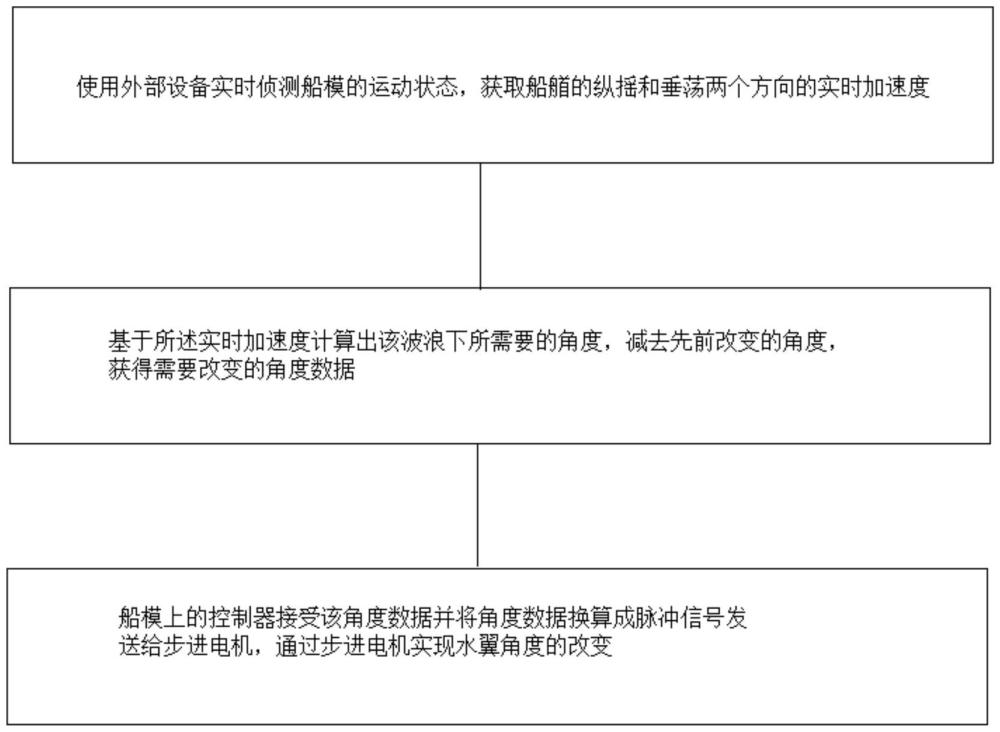
3、使用外部设备实时侦测船模的运动状态,获取船艏的纵摇和垂荡两个方向的实时加速度;
4、基于所述实时加速度计算出该波浪下所需要的角度,减去先前改变的角度,获得需要改变的角度数据;
5、船模上的控制器接受该角度数据并将角度数据换算成脉冲信号发送给步进电机,通过步进电机实现水翼角度的改变。
6、作为优选,步骤“基于所述实时加速度计算出该波浪下所需要的角度”包括如下:
7、将广义速度ur定义以为:将水翼的质心定义为(xc1,yc1),其计算公式为:
8、
9、公式中,lc1为水翼中心与旋转中心之间的距离,x0,y0是c1在0-xy局部坐标系中的相对坐标;
10、凯恩方程包括以下:
11、
12、其中i表示刚体的数量,r表示广义速度的数量,计算各部分的部分速度、加速度和角加速度、力和力矩等参数,代入上述式(2)、(3)、(4),即可得到船舶运动力学方程的解,微分方程(1)可以求出速度和加速度;,广义部分速度相对于c1点的广义速度如下所示:
13、
14、水动力计算公式如下:
15、
16、其中,ρ为海水密度,cd为水阻力系数,s为船艏翼的投影面积,u为船艏翼的相对速度;计算船艏叶面上切向和法向的速度:
17、
18、
19、将速度代入水动力方程,则水动力力在绝对坐标系下表示为:
20、
21、法向阻力系数为cdn,船体前进向和升沉方向的阻尼力记为fcx2和fcy2,其表达式为:
22、
23、其中ccx2为船体在x方向上的阻尼系数,ccy2为船体在y方向上的阻尼系数,波面升降位移为“w”型,船体升沉方向的恢复力由船体的浮力和重力提供,恢复力为:
24、
25、式中,m2为船体质量,g为重力加速度,a为船体横截面积,y20为静水平衡条件下吃水深度,y2为平衡位置相对吃水深度,ρga可用ky表示,表示静压刚度;
26、设艏翼的惯性矩为m1*,船体的惯性力为f2x*和f2y*,方程为:
27、
28、其中i1是船艏的转动惯量,z轴的方向表示为:
29、通过上述推导,将结果代入凯恩方程,得到波浪动力船舶的运动方程,方程表示为:
30、
31、通过上式,船艏翼上水动力推进力的三分量可表示为:
32、
33、该三个方程对应三个要素,即x方向的速度:y方向的速度:和水翼的角速度:
34、艏翼旋转产生的fp3力很小;在计算主推力时,忽略fp3分量,表达式可简化为:
35、fp=fp1+fp2 (18)
36、主推进力和运动参数方程为:
37、
38、当式(19)的微分结果为零时,可得到最大推进力:
39、
40、水翼产生最大推力的上述所述所需要的角度应满足式(20),简化后可表示为x、y方向的速度函数:
41、
42、作为优选,步骤“使用外部设备实时侦测船模的运动状态,获取船艏的纵摇和垂荡两个方向的实时加速度”包括:
43、采用qualisys动态捕捉系统,于试验前在拖曳水池内布置动态捕捉区域,在动态捕捉区域内放置多个红外线灯和摄影机,并在船模上安装标记物,所述动态捕捉系统工作时,红外线灯将发射红外线对船模进行照射,其上的标记物会反射红外线并被摄影机采集生成二维图像,qualisys动态捕捉系统将多个二维图像合成为三维模型,并通过提前输入的模型参数获得模型的运动轨迹,将纵摇和垂荡的位移数据提取出来;
44、其中,v0为初速度,以1秒为间隔通过所述位移数据算出纵摇和垂荡两个方向的实时加速度。
45、作为优选,还包括如下步骤:
46、建立局域网,通过所述局域网连接所述qualisys动态捕捉系统与船模。
47、本发明还提供一种试验用主动船舶艏翼攻角控制系统,包括:
48、拖曳水池,其内形成有动态捕捉区域供船模于水中行进;
49、qualisys动态捕捉系统,其包括多个红外线灯和摄影机,在所述动态捕捉区域放置多个红外线灯和摄影机,所述船模上安装多个标记物,该qualisys动态捕捉系统用于实时侦测船模的运动状态,获取船艏的纵摇和垂荡两个方向的实时加速度;
50、存储设备,其电连接所述qualisys动态捕捉系统,该存储设备中存储有多条指令,所述指令适于由处理器加载并执行:
51、基于所述实时加速度计算出该波浪下所需要的角度,减去先前改变的角度,获得需要改变的角度数据;船模上的控制器接受该角度数据并将角度数据换算成脉冲信号发送给步进电机,通过步进电机实现水翼角度的改变。
52、本发明还提供一种试验用主动船舶艏翼攻角控制系统,包括:
53、拖曳水池,其内形成有动态捕捉区域供船模于水中行进;
54、qualisys动态捕捉系统,其包括多个红外线灯和摄影机,在所述动态捕捉区域放置多个红外线灯和摄影机,所述船模上安装多个标记物,该qualisys动态捕捉系统用于实时侦测船模的运动状态,获取船艏的纵摇和垂荡两个方向的实时加速度;
55、移动终端,其电连接所述qualisys动态捕捉系统,该移动终端包括:
56、处理器,适于实现各指令;以及
57、存储设备,适于存储多条指令,所述指令适于由处理器加载并执行:基于所述实时加速度计算出该波浪下所需要的角度,减去先前改变的角度,获得需要改变的角度数据;船模上的控制器接受该角度数据并将角度数据换算成脉冲信号发送给步进电机,通过步进电机实现水翼角度的改变。
58、作为优选,该qualisys动态捕捉系统用于实时侦测船模的运动状态,获取船艏的纵摇和垂荡两个方向的实时加速度的过程如下:
59、所述红外线灯将发射红外线对船模进行照射,其上的标记物会反射红外线并被摄影机采集生成二维图像,qualisys动态捕捉系统将多个二维图像合成为三维模型,并通过提前输入的模型参数获得模型的运动轨迹,将纵摇和垂荡的位移数据提取出来;
60、其中,v0为初速度,以1秒为间隔通过所述位移数据算出纵摇和垂荡两个方向的实时加速度。
61、作为优选,基于所述实时加速度计算出该波浪下所需要的角度,是包括如下:
62、将广义速度ur定义以为:将水翼的质心定义为(xc1,yc1),其计算公式为:
63、
64、公式中,lc1为水翼中心与旋转中心之间的距离,x0,y0是c1在0-xy局部坐标系中的相对坐标;
65、凯恩方程包括以下:
66、
67、其中i表示刚体的数量,r表示广义速度的数量,计算各部分的部分速度、加速度和角加速度、力和力矩等参数,代入上述式(2)、(3)、(4),即可得到船舶运动力学方程的解,微分方程(1)可以求出速度和加速度;,广义部分速度相对于c1点的广义速度如下所示:
68、
69、水动力计算公式如下:
70、
71、其中,ρ为海水密度,cd为水阻力系数,s为船艏翼的投影面积,u为船艏翼的相对速度;计算船艏叶面上切向和法向的速度:
72、
73、将速度代入水动力方程,则水动力力在绝对坐标系下表示为:
74、
75、法向阻力系数为cdn,船体前进向和升沉方向的阻尼力记为fcx2和fcy2,其表达式为:
76、
77、其中ccx2为船体在x方向上的阻尼系数,ccy2为船体在y方向上的阻尼系数,波面升降位移为“w”型,船体升沉方向的恢复力由船体的浮力和重力提供,恢复力为:
78、
79、式中,m2为船体质量,g为重力加速度,a为船体横截面积,y20为静水平衡条件下吃水深度,y2为平衡位置相对吃水深度,ρga可用ky表示,表示静压刚度;
80、设艏翼的惯性矩为m1*,船体的惯性力为f2x*和f2y*,方程为:
81、
82、其中i1是船艏的转动惯量,z轴的方向表示为:
83、通过上述推导,将结果代入凯恩方程,得到波浪动力船舶的运动方程,方程表示为:
84、
85、通过上式,船艏翼上水动力推进力的三分量可表示为:
86、
87、该三个方程对应三个要素,即x方向的速度:y方向的速度:和水翼的角速度:
88、艏翼旋转产生的fp3力很小;在计算主推力时,忽略fp3分量,表达式可简化为:
89、fp=fp1+fp2 (18)
90、主推进力和运动参数方程为:
91、
92、当式(19)的微分结果为零时,可得到最大推进力:
93、
94、水翼产生最大推力的上述所述所需要的角度应满足式(20),简化后可表示为x、y方向的速度函数:
95、
96、作为优选,所述动态捕捉区域的截面积为长方形且其长度为10m、宽度为6m,所述船模的长度为2-4m、宽度为0.5m-1m,所述红外线灯的数量为8个,所述摄影机的数量为2个,该动态捕捉区域的位于水面以上的四个角落处均安装一所述红外线灯,该动态捕捉区域的一侧还设置一沿长度方向布置的支撑架,所述支撑架上沿所述长度方向以2m间隔均匀安装4个所述红外线灯,该4个红外线灯中位于最前方的一个与该动态捕捉区域最前端的距离为2m,该4个红外线灯中位于最后方的一个与该动态捕捉区域最后端的距离为2m,该支撑架上对应于动态捕捉区域的最前、后端的位置处各安装一个所述摄影机。
97、本发明提供的试验用主动船舶艏翼攻角控制方法及系统,具有如下技术效果:
98、通过本技术,可以很好的减少试验前的准备工作,可以在不额外增加设备的情况下达到相同目的,减少了所需要的试验配件,降低了配件的损坏概率提高了可靠性;对首测船模本身结构要求较低,同时对防水要求相对较低,因为需要裸露在船体外的检测器几乎没有,所以不防水的设备可以安装在船体内部,运动捕捉监控器安装是安装在地面和墙上,几乎可以安装在绝大多数现有的船模上,不需要另外定制。同时,程序相对简单,仅通过labview就可以完成所有操作。
99、该方案主要基于qualisys动态捕捉系统对标记点的运动数据进行监控并记录,通过采集到的运动数据计算船模实时的移动距离,并通过加速度公式在限定的一段时间内计算出船模的实时加速度以达到获取试验所需参数的目的。进而换算成水翼所需要的角度,通过局域网将数据传递给模型上的数据采集系统,并转换为步进电机所需要的脉冲信号,将脉冲信号提供给步进电机控制器操纵电机完成水翼角度改变。
100、其中,所布置的红外线灯和摄影机于特定尺寸中的动态捕捉区域的分布方式,能够以更加低成本且高效的完成对于船模的加速度的获取,该些布置的成本远远低于现有技术的成本。能够高效完成实验,对于后期的实践具有指导意义。
本文地址:https://www.jishuxx.com/zhuanli/20241106/324323.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表