一种重型汽车横纵向耦合控制系统仿真测试方法与流程
- 国知局
- 2024-11-21 11:36:51
本发明属于辅助驾驶仿真测试,具体涉及一种重型汽车横纵向耦合控制系统仿真测试方法。
背景技术:
1、高级辅助驾驶系统是利用安装在汽车上的各种传感器监测驾驶员、车辆及其行驶环境,进行系统的横向和纵向控制,有效地增加汽车驾驶的舒适性和安全性。传统的车辆控制系统分为横向控制系统和纵向控制系统,但横向控制系统仅控制车辆横向运动,纵向控制系统仅控制车辆纵向运动,针对冰面路面、过弯道、过障碍物、过十字路口等场景传统的车辆控制系统并不能有效地控制整个车辆,因此横纵向耦合控制而成的横纵向耦合控制系统应运而生。
2、横纵向耦合控制系统通过把横向控制系统的自动紧急制动功能、自适应巡航功能和纵向控制系统的车道保持功能、车道纠偏、换道辅助等一系列功能耦合在一起综合进行控制。为保证横纵向耦合控制系统的安全性和可靠性,需要对其进行充分的仿真测试,但目前仅有单个功能的强制性或推荐性指导文件,缺乏针对横纵向耦合控制系统有效的强制性指导文件,且相关指导文件也仅仅侧重于实车测试,无法直接指导横纵向耦合控制系统仿真测试。
3、此为现有技术的不足,因此,针对现有技术中的上述缺陷,提供一种重型汽车横纵向耦合控制系统仿真测试方法,是非常有必要的。
技术实现思路
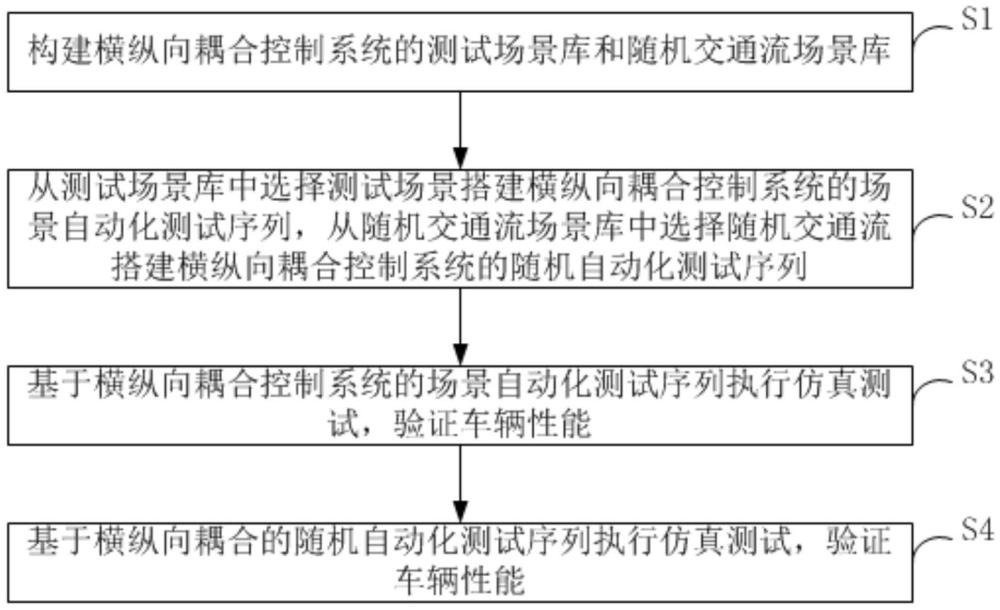
1、针对现有技术的上述为保证横纵向耦合控制系统的安全性和可靠性,需要对其进行充分的仿真测试,但目前仅有单个功能的强制性或推荐性指导文件,缺乏针对横纵向耦合控制系统有效的强制性指导文件,且相关指导文件也仅仅侧重于实车测试,无法直接指导横纵向耦合控制系统仿真测试的缺陷,本发明提供一种重型汽车横纵向耦合控制系统仿真测试方法,以解决上述技术问题。本发明提供一种重型汽车横纵向耦合控制系统仿真测试方法,包括如下步骤:s1.构建横纵向耦合控制系统的测试场景库和随机交通流场景库;
2、s2.从测试场景库中选择测试场景搭建横纵向耦合控制系统的场景自动化测试序列,从随机交通流场景库中选择随机交通流搭建横纵向耦合控制系统的随机自动化测试序列;
3、s3.基于横纵向耦合控制系统的场景自动化测试序列执行仿真测试,验证车辆性能;
4、s4.基于横纵向耦合的随机自动化测试序列执行仿真测试,验证车辆性能。进一步地,步骤s1具体步骤如下:
5、s11.设置横纵向耦合控制系统的各测试场景库,并定义各测试场景库的测试场景;
6、s12.获取设置的测试场景的视频图像,并将各测试场景的视频图像保存到测试场景库;
7、s13.设置车辆前后随机车辆的运动状态种类;
8、s14.将车辆的运动状态进行组合搭配生成随机交通流,将各随机交通流保存到随机交通流场景库。
9、进一步地,步骤s11具体步骤如下:
10、s111.设置横纵向耦合控制系统的测试场景库包括冰雪路面场景库、过弯场景库、过障碍物场景库和过十字路口场景库;
11、s112.设置冰雪路面场景库中基于不同路况、不同冰雪状态,不同行驶状态组合的测试场景;
12、s113.设置过弯场景库中不同弯道状况、不同行驶状态组合的测试场景;
13、s114.设置过障碍物场景库中基于不同路况、不同行驶状态,不同障碍物状态组合的测试场景;
14、s115.设置过十字路口场景库中基于不同行驶状态、不同行驶环境组合的测试场景。
15、进一步地,步骤s12具体步骤如下:
16、s121.设置车辆按照各测试场景库的每个测试场景运行;
17、s122.采集车辆运行过程中视频图像,并将采集的视频图像保存到测试场景库中。
18、进一步地,步骤s2具体步骤如下:
19、s21.从各测试场景库中选取设定数量的测试场景;
20、s22.将选出的测试场景进行排列,生成横纵向耦合控制系统的场景自动化测试序列;
21、s23.从随机交通流场景库中选取设定数量的随机交通流,将选出的随机交通流进行排列,生成横纵向耦合控制系统的随机自动化测试序列。
22、进一步地,步骤s3具体步骤如下:
23、s31.搭建横纵向耦合控制系统的测试环境;
24、s32.在测试环境中引入场景自动化测试序列进行仿真测试;
25、s33.采集模拟车辆的运行数据,根据采集的运行数据对模拟车辆在各测试场景性能进行评价,并生成测试报告。
26、进一步地,步骤s31具体步骤如下:
27、s311.在测试台架配置测试机、毫米波雷达模拟器以及虚拟摄像头;
28、s312.在测试机设置交通场景仿真工具、车辆动力学工具以及试验管理工具;
29、s313.将场景自动化测试序列导入测试机;
30、s314.测试机及毫米波雷达模拟器上电;
31、s315.对毫米波雷达模拟进行静态和动态标定,对虚拟摄像头进行静态近靶、静态远靶以及动态标定;
32、步骤s32具体步骤如下:
33、s321.试验管理工具按照场景自动化序列的排列顺序控制各测试场景的执行;
34、s322.交通场景仿真工具将对应执行的测试场景的视频图像进行播放,展示对应车辆行驶状态下的路况、冰雪状态、弯道状况、行驶环境;
35、步骤s33具体步骤如下:
36、s331.通过车辆动力学工具采集模拟车辆的运行参数;
37、s332.将测试场景的行驶状态与采集运行参数进行比,根据预设的标准对各测试场景的运行稳定性及运行反馈状态进行评价;
38、s333.将评价结果生成场景测试报告。
39、进一步地,步骤s4具体步骤如下:
40、s41.在测试环境中引入随机自动化测试序列进行仿真测试;
41、s42.采集模拟车辆的运行数据,根据采集的运行数据对模拟车辆在各随机交通流的性能进行评价,并生成测试报告。
42、进一步地,步骤s41具体步骤如下:
43、s411.测试机及毫米波雷达模拟器维持上电状态;
44、s412.测试机系统重置;
45、s413.在测试机设置随机交通流的场景工具;
46、s414.试验管理工具按照随机自动化序列的排列顺序控制各随机交通流的执行;s415.设置模拟车辆本车的初始车速,随机交通流的场景工具加载对应执行的随机交通流;
47、步骤s42具体步骤如下:
48、s421.打开模拟车辆的横纵向耦合控制系统开关,并设置运行时间;
49、s422.通过车辆动力学工具和毫米波雷达模拟器工具循环采集的模拟车辆的运行参数,直至运行时间结束;
50、s423.关闭模拟车辆的横纵向耦合控制开关;
51、s424.卸载随机交通流的场景工具、交通场景仿真工具、车辆动力学工具以及试验管理工具;
52、s425.测试机及毫米波雷达模拟器下电;
53、s426.根据采集模拟车辆的运行参数对车辆在随机交通流场景的跟踪精度、舒适性、安全性进行评价,并生成测试报告。
54、进一步地,步骤s422中采集的模拟车辆的运行参数包括模拟车辆本车的车速信号、油门信号、刹车踏板信号、前车车速、前车距离、侧向车辆车速和侧向车辆距离。
55、本发明的有益效果在于:
56、本发明提供的重型汽车横纵向耦合控制系统仿真测试方法,实现重型汽车横纵向耦合控制系统硬件在环仿真测试,从主动安全性、运行稳定性、舒适性方面进行来评判,实用性强。
57、此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
58、由此可见,本发明与现有技术相比,具有突出的实质性特点和显著的进步,其实施的有益效果也是显而易见的。
本文地址:https://www.jishuxx.com/zhuanli/20241120/332023.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表