一种基于分布电极的柔性导管末端接触状态检测方法
- 国知局
- 2024-11-21 11:39:02
本发明属于医疗器械领域,尤其涉及一种基于分布电极的柔性导管末端接触状态检测方法。
背景技术:
1、在经自然腔道手术中,柔性导管需要穿过狭窄、弯曲的腔道,这对操作技术提出了很高的要求。传统的导管操作主要依赖于医生的经验,难以确定柔性导管与自然腔道的具体接触状态。而随着手术操作的复杂性增加,导管与组织之间的交互变得尤为关键,不同手术操作对应不同的接触状态,因此,实时监测柔性导管末端的接触状态显得尤为重要。
技术实现思路
1、本发明要解决的技术问题是如何获取柔性导管末端与自然腔道的接触状态,本发明提出了一种基于分布电极的柔性导管末端接触状态检测方法。
2、根据本发明实施例的一种基于分布电极的柔性导管末端接触状态检测方法,利用分布电极的柔性导管实施,所述分布电极的柔性导管包括柔性导管基体、导电电极;所述柔性导管基体为中空圆柱形绝缘弹性体,所述导电电极沿柔性导管基体周向均布且数量为不小于7的奇数,其特征在于,所述基于分布电极的柔性导管末端接触状态检测方法包括以下步骤:
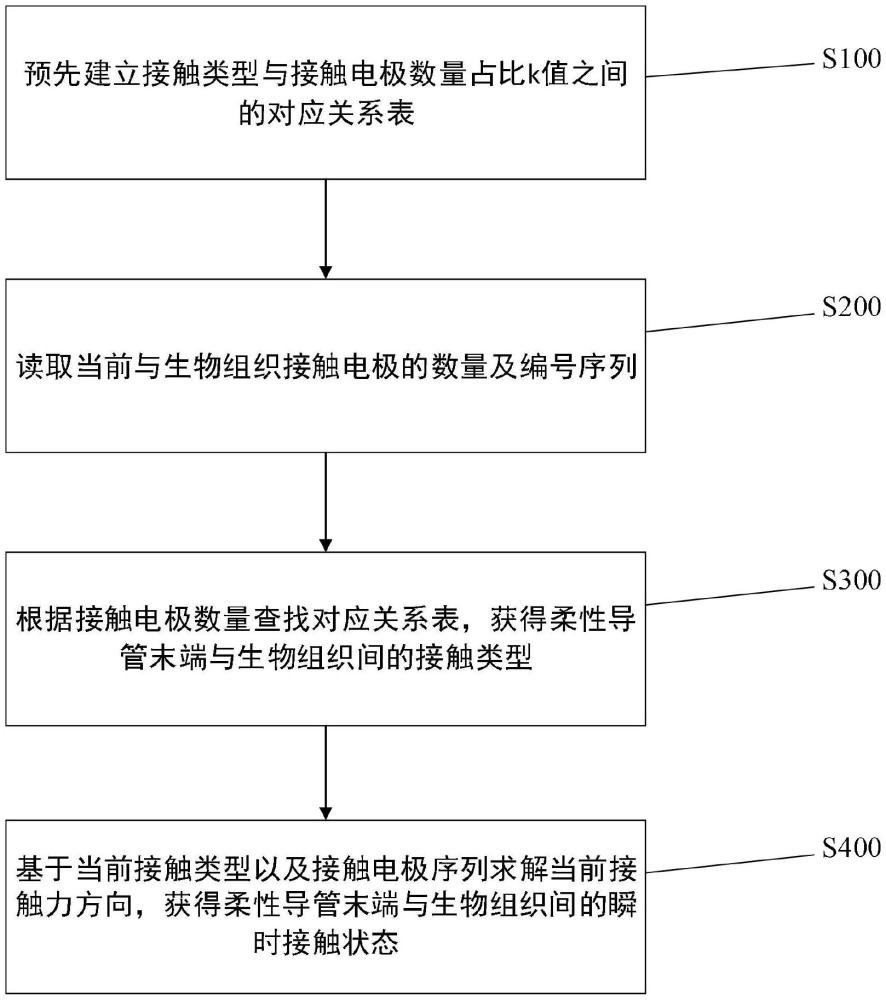
3、预先建立所述接触类型与接触电极数量占比k值之间的对应关系表;
4、读取当前与生物组织接触电极序列并计算接触电极数量占比k值;
5、根据接触电极数量占比k值查找对应关系表,获得柔性导管末端与生物组织间的接触类型;
6、基于当前接触类型以及接触电极编号序列,当接触状态类型为轻度接触和深度接触状态时所述接触力方向为当前接触电极编号序列的中位数编号导电电极所在方向,其他接触类型下判断为无接触力方向信息,进而获得柔性导管末端与生物组织间的瞬时接触状态;
7、接触电极数量占比k值的基本计算公式为:
8、
9、其中k为接触电极数量占比,n为当前接触状态下导电电极的数量,c为基于分布电极的柔性导管上分布电极总数量。
10、经实验验证当柔性导管直径5毫米、模拟自然腔道壁为哺乳动物支气管壁、导电电极数量为41,测试结果如下表所示:
11、接触类型与接触电极数量占比k值对应表
12、
13、根据本发明实施例的一种基于分布电极的柔性导管末端接触状态检测方法,通过预先建立所述接触类型与接触电极数量占比k值之间的对应关系表,在自然腔道手术的过程中,仅需获取柔性导管与自然腔道壁的接触电极数量占比k值,即可对照对应关系表获得柔性导管末端与生物组织间的接触类型,基于当前接触类型以及接触电极序列求解当前接触力方向,获得柔性导管末端与生物组织间的瞬时接触状态,从而可以实时检测体内细长柔性导管末端瞬时接触状态,提高诊疗效果。另外,方法简单、可靠,可以保证初学者手术操作的安全性。
14、根据本发明的一些实施例,所述预先建立所述接触类型与接触电极数量占比k值之间的对应关系表,包括:
15、建立与所述自然腔道壁相同的测试环境,测试环境包括模拟自然腔道管壁,所述模拟自然腔道管壁上设有压力检测装置;
16、设置多组条件测试参数,获取每组条件测试参数下不同接触电极数量占比k值所对应的接触类型,并建立接触类型与接触电极数量占比k值之间的对应关系表。
17、根据本发明的一些实施例,所述条件测试参数包括:施加至所述柔性导管的驱动力的大小及方向。
18、在本发明的一些实施例中,所述柔性导管末端与自然腔道壁的接触电极数量占比k值对应的接触类型及接触力方向,包括:
19、当所述接触电极数量占比k值为0%时,接触类型为无接触,无接触力方向信息;
20、当所述接触电极数量占比k值为1%至30%时,接触类型为轻度接触,当前接触电极编号序列的中位数编号导电电极所在方向;
21、当所述接触电极数量占比k值为31%至60%时,接触类型为深度接触,当前接触电极编号序列的中位数编号导电电极所在方向;
22、当所述接触电极数量占比k值为大于60%时,自然腔道壁有被柔性导管刺破的风险。
23、根据本发明实施例的一种基于分布电极的柔性导管末端接触状态检测方法,包括:
24、感应组件,所述感应组件感应导电电极是否与自然腔道接触;
25、计算模块,根据接触电极数量计算所述接触电极数量占比k值;
26、接触类型确定模块,根据接触电极数量占比k值确定所述柔性导管末端与生物组织间的接触类型;
27、接触力方向获取模块,基于当前接触类型以及接触电极序列求解当前接触力方向,获得柔性导管末端与生物组织间的瞬时接触状态。
28、根据本发明实施例的一种基于分布电极的柔性导管末端接触状态检测装置,通过感应组件感应导电电极是否与自然腔道接触,由计算模块根据根据接触电极数量计算所述接触电极数量占比k值,接触类型确定模块可以根据根据接触电极数量占比k值确定所述柔性导管末端与生物组织间的接触类型,接触力方向获取模块基于当前接触类型以及接触电极序列求解当前接触力方向,获得柔性导管末端与生物组织间的瞬时接触状态。从而可以实时检测体内细长柔性导管末端瞬时接触状态,提高诊疗效果,同时具有成本低,不易损坏的优点。另外,方法简单、可靠,可以保证初学者手术操作的安全性。
技术特征:1.一种基于分布电极的柔性导管末端接触状态检测方法,利用分布电极的柔性导管实施,所述分布电极的柔性导管包括柔性导管基体、导电电极;所述柔性导管基体为中空圆柱形绝缘弹性体,所述导电电极沿柔性导管基体周向均布且数量为不小于7的奇数,其特征在于,所述基于分布电极的柔性导管末端接触状态检测方法包括以下步骤:
技术总结本发明提出一种基于分布电极的柔性导管末端接触状态检测方法,所述方法用于在采用柔性导管对生物自然腔道检查时,获取柔性导管末端与腔道管壁之间接触类型及接触力方向,得到当前柔性导管末端与生物组织间的瞬时接触状态。方法包括:预先建立接触类型与接触电极数量占比k值之间的对应关系表;读取当前与生物组织接触电极的数量及编号序列;根据接触电极数量查找对应关系表,获得柔性导管末端与生物组织间的接触类型;基于当前接触类型以及接触电极序列求解当前接触力方向,获得柔性导管末端与生物组织间的瞬时接触状态。技术研发人员:王开瑞,邢清华,姜金刚,张纪勇,陈銃受保护的技术使用者:哈尔滨理工大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332216.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表